Linux ARM平台开发系列讲解(摄像头V4L2子系统) 2.12.6 OV13850 v4l2_subdev注册匹配、摄像头出图测试和工具介绍
1. 概述
上章节讲到了 V4L2 control的原理和实现,主要是设置图像处理和一些电源管理,一般不带ISP摄像头设置完这些后就可以进行sbudev的注册了,注册完基本就完成了整个驱动,具体分析如下。
2. 开启ov13850摄像头
- 源码下载请看摄像头第一章
- 源码路径:
drivers\media\i2c\ov13850.c
static int __ov13850_power_on(struct ov13850 *ov13850)
{
int ret;
u32 delay_us;
struct device *dev = &ov13850->client->dev;
struct i2c_client *client = ov13850->client;
unsigned short addr;
mutex_lock(&ov13850_power_mutex);
/* 上电 */
ret = __ov13850_master_power_on(dev);
if (ret) {
dev_err(dev, "could not power on, error %d\n", ret);
goto err_power;
}
/* 等待启动 */
usleep_range(500, 1000);
if (!IS_ERR(ov13850->pwdn_gpio))
gpiod_set_value_cansleep(ov13850->pwdn_gpio, 1);
/* 8192 cycles prior to first SCCB transaction */
delay_us = ov13850_cal_delay(8192);
usleep_range(delay_us, delay_us * 2);
/* Change i2c address by programming SCCB_ID */
addr = client->addr;
if (addr != OV13850_VENDOR_I2C_ADDR) {
client->addr = OV13850_VENDOR_I2C_ADDR;
ret = ov13850_write_reg(client, OV13850_REG_SCCB_ID,
OV13850_REG_VALUE_08BIT,
addr * 2);
if (ret) {
dev_err(dev, "write SCCB_ID failed\n");
goto err_i2c_addr;
}
client->addr = addr;
}
mutex_unlock(&ov13850_power_mutex);
return 0;
err_i2c_addr:
if (!IS_ERR(ov13850->pwdn_gpio))
gpiod_set_value_cansleep(ov13850->pwdn_gpio, 0);
__ov13850_master_power_off(dev);
err_power:
mutex_unlock(&ov13850_power_mutex);
return ret;
}
3. 校验ov13850摄像头
一般摄像头都会有一个寄存器用来存放厂家ID,用户可以用此ID区分不同的摄像头,从而进行驱动分别适配,如ov13850厂家ID如下。

static int ov13850_check_sensor_id(struct ov13850 *ov13850,
struct i2c_client *client)
{
struct device *dev = &ov13850->client->dev;
u32 id = 0;
int ret;
ret = ov13850_read_reg(client, OV13850_REG_CHIP_ID,
OV13850_REG_VALUE_16BIT, &id);
if (id != CHIP_ID) {
dev_err(dev, "Unexpected sensor id(%06x), ret(%d)\n", id, ret);
return -ENODEV;
}
ret = ov13850_read_reg(client, OV13850_CHIP_REVISION_REG,
OV13850_REG_VALUE_08BIT, &id);
if (ret) {
dev_err(dev, "Read chip revision register error\n");
return ret;
}
if (id == OV13850_R2A)
ov13850_global_regs = ov13850_global_regs_r2a;
else
ov13850_global_regs = ov13850_global_regs_r1a;
dev_info(dev, "Detected OV%06x sensor, REVISION 0x%x\n", CHIP_ID, id);
return 0;
}
4. 注册subdev进入v4l2系统
可以看到,摄像头注册的最后一步v4l2_async_register_subdev_sensor_common就是将该设备注册进入v4l2,然后与v4l2_device进行匹配。
/* 注册subdev设备 */
ret = v4l2_async_register_subdev_sensor_common(sd);
if (ret) {
dev_err(dev, "v4l2 async register subdev failed\n");
goto err_clean_entity;
}
pm_runtime_set_active(dev);
pm_runtime_enable(dev);
pm_runtime_idle(dev);
5. 摄像头出图测试
到这里OV13850摄像头驱动基本完成,源码可以到第一章节下载查看,接下来就去测试摄像头出图。
5.1 工具介绍及其安装
在第一章节介绍摄像头的时候就已经介绍过media-ctl 这款v4l2出图工具了,他是v4l-utils的一个子工具,现在看看如何安装。
Ubuntu安装方法
sudo apt-get install v4l-utils
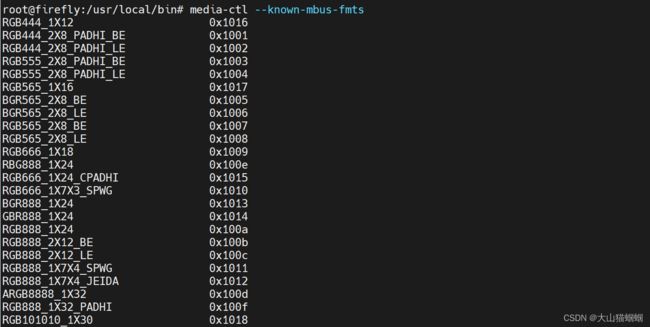
5.2 media-ctl查看支持的图像格式
media-ctl --known-mbus-fmts
如下图,只是截取其中一部分格式,media-ctl工具基本支持市面上所有常见的格式
5.3 Media-ctl: 拓扑结构(topology)
驱动如果有支持 Media Controller, 在 CIF 或 ISP 加载成功后会创建 media 设备, 如 /dev/media0。利用 media-ctl 可以打印出当前的 pipeline 的链接情况。如下面的信息,就是rk3399和ov13850的链路拓扑结构。
root@firefly:/usr/local/bin# media-ctl -p /dev/media0
Media controller API version 0.1.0
Media device information
------------------------
driver rkisp1
model rkisp1
serial
bus info
hw revision 0x0
driver version 0.0.0
Device topology
- entity 1: rkisp1-isp-subdev (4 pads, 6 links)
type V4L2 subdev subtype Unknown flags 0
device node name /dev/v4l-subdev0
pad0: Sink
[fmt:SBGGR10_1X10/2112x1568 field:none
crop.bounds:(0,0)/2112x1568
crop:(0,0)/2112x1568]
<- "rkisp1_dmapath":0 []
<- "rockchip-mipi-dphy-rx":1 [ENABLED]
pad1: Sink
<- "rkisp1-input-params":0 [ENABLED]
pad2: Source
[fmt:YUYV8_2X8/2112x1568 field:none
crop.bounds:(0,0)/2112x1568
crop:(0,0)/2112x1568]
-> "rkisp1_selfpath":0 [ENABLED]
-> "rkisp1_mainpath":0 [ENABLED]
pad3: Source
-> "rkisp1-statistics":0 [ENABLED]
- entity 2: rkisp1_mainpath (1 pad, 1 link)
type Node subtype V4L flags 0
device node name /dev/video0
pad0: Sink
<- "rkisp1-isp-subdev":2 [ENABLED]
- entity 3: rkisp1_selfpath (1 pad, 1 link)
type Node subtype V4L flags 0
device node name /dev/video1
pad0: Sink
<- "rkisp1-isp-subdev":2 [ENABLED]
- entity 4: rkisp1_dmapath (1 pad, 1 link)
type Node subtype V4L flags 0
device node name /dev/video2
pad0: Source
-> "rkisp1-isp-subdev":0 []
- entity 5: rkisp1-statistics (1 pad, 1 link)
type Node subtype V4L flags 0
device node name /dev/video3
pad0: Sink
<- "rkisp1-isp-subdev":3 [ENABLED]
- entity 6: rkisp1-input-params (1 pad, 1 link)
type Node subtype V4L flags 0
device node name /dev/video4
pad0: Source
-> "rkisp1-isp-subdev":1 [ENABLED]
- entity 7: rockchip-mipi-dphy-rx (2 pads, 2 links)
type V4L2 subdev subtype Unknown flags 0
device node name /dev/v4l-subdev1
pad0: Sink
[fmt:SBGGR10_1X10/2112x1568@10000/300000 field:none]
<- "m00_b_ov13850 1-0036":0 [ENABLED]
pad1: Source
[fmt:SBGGR10_1X10/2112x1568@10000/300000 field:none]
-> "rkisp1-isp-subdev":0 [ENABLED]
- entity 8: m00_b_ov13850 1-0036 (1 pad, 1 link)
type V4L2 subdev subtype Sensor flags 0
device node name /dev/v4l-subdev2
pad0: Source
[fmt:SBGGR10_1X10/2112x1568@10000/300000 field:none]
-> "rockchip-mipi-dphy-rx":0 [ENABLED]
5.4 Media-ctl: entity、pad 及 link
Entity 在 Media Controller 中,表示一个节点。它包含一个或多个的输入输出 pads。Link 表示一条链接,它连接多个不同的 pad。多个 Link 组成了一条完整的 pipeline。
Entity 的名称可以从拓扑结构中查看,比如以下都是 entity 的名称:
ov2685 7-003crkisp1-isp-subdevrkisp1_mainpath
Pad 由数字表示,一个 Entity 中可以包含多个 pad,既可以有 Source, 也可以有 Sink。 Link 连接两个”entity”:pad,比如以下表示的链接,
- “
rkisp1-isp-subdev”:2->“rkisp1_mainpath”:0 - “
rkisp1-isp-subdev”:3->“rkisp1-statistics”:0 - 链接的状态可以是
Active, 也可以是In-Active。
Media Controller 提供了灵活配置 pipeline 的功能, 在 CIF、ISP 驱动初始化过程中,会根 据配置,将 Link 完整建立起来,如果有多个 Sensor 会激活其中的一个。 用户可以使用 media-ctl 命令修改 Link 的 Active 状态,也可以修改 Pad 的 format、size。
5.5 Media-ctl:In-/Active Link
如图2 ISP 双 Camera 拓扑结构,有多个 Sensor 连接到同一个 Mipi D-Phy, 同时只能有 一个是 Active 状态。以下示例设置 ov2659 为 Active。
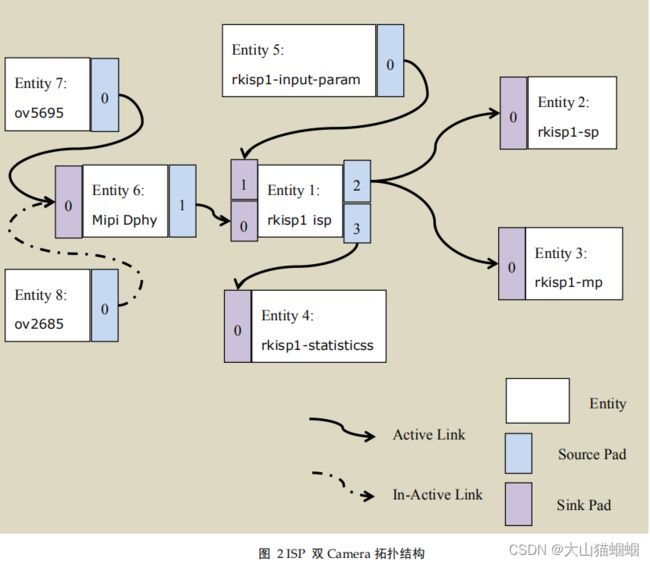
#首先将 ov5695 设置为 In-Active
media-ctl -l '"ov5695 7-0036":0->"rockchip-sy-mipi-dphy":0[0]'
#再将 ov2685 设置为 Active
media-ctl -l '"ov2685 7-003c":0->"rockchip-sy-mipi-dphy":0[1]'
注意:
- 格式为:
media-ctl -l '"entity name":pad->"entity name":pad[Status]'
- 整个
link需要用单引号,因为有特殊字符,如> [ ] Entity name需要用双引号,因为中间有空格Status用0或1表示Active或In-Active,需要用中括号
5.6 Media-ctl:修改 fmt/size
如图 2 ISP 双 Camera 拓扑结构,以下示例如何修改 fmt/size。 示例一,修改 ov5695 输出的 size 为 640x480(前提是 ov5695 驱动中已经有支持 640x480 输出,否则设置不会成功),并设置整个 pipeline 的输入输出分辨率都为 640x480,同时 isp entity 的 format 为 YUYV。
- 设置
Sensor输出640x480
media-ctl -d /dev/media0 --set-v4l2 '"ov5695 7-0036":0[fmt:SBGGR10_1X10/640x480]'
- 设置 isp 的接收(从 mipi dphy)格式及大小,格式要求要与 Sensor 输出相同
media-ctl -d /dev/media0 --set-v4l2 '"rkisp1-isp-subdev":0[fmt:SBGGR10_1X10/640x480]'
- isp 接收的大小可以 crop(裁剪),但这里还保持 640x480
media-ctl -d /dev/media0 --set-v4l2 '"rkisp1-isp-subdev":0[crop:(0,0)/640x480]'
- 设置 isp 输出的,YUV 格式只能是 YUYV2X8
media-ctl -d /dev/media0 --set-v4l2 '"rkisp1-isp-subdev":2[fmt:YUYV8_2X8/640x480]'
- isp 输出也有 crop 功能,但也保持 640x480
media-ctl -d /dev/media0 --set-v4l2 '"rkisp1-isp-subdev":2[crop:(0,0)/640x480]'
注意:
- 不同版本的
v4l-utils其对应的fmt代码可能不同,最好用media-ctl查看
media-ctl --known-mbus-fmts
- 注意特殊字符,需要使用单引号或双引号
- 注意引号中不要少掉空格,也不要多出空格
- 请使用
media-ctl --help,查看更详细的使用帮助
5.7 v4l2-ctl 设置 fmt、controls 及抓帧
Media-ctl 工具的操作是通过/dev/medio0 等 media 设备,它所管理是 Media 的拓扑结构中 各个节点的 format,大小,链接。V4l2-ctl 工具则是针对/dev/video0,/dev/video1 等 video 设备,它在 video 设备上进行 set_fmt,reqbuf,qbuf,dqbuf,stream_on,stream_off 等一 系列操作。
本文中主要用 v4l2-ctl 进行采集帧数据,设置曝光、gain、VTS 等 v4l2_control。
首先还是要建议先查看 v4l2-ctl 的帮助文档。帮助文档内容比较多,分成很多个部分,我们比 较关心,streaming,vidcap。
- 查看
v4l2-ctl帮助介绍
v4l2-ctl --help
- 查看完整的帮助文档如下,内容很多。
v4l2-ctl --help-all
- 查看与
streaming相关的参数如下
v4l2-ctl --help-streaming
- 查看与
vidcap相关的参数如下。它主要包括get-fmt、set-fmt等
v4l2-ctl --help-vidcap
5.7.1 设置 fmt 并抓帧
示例一,在 px3se-evb 板上,抓取 1 帧 nv12 数据保存到/tmp/cif.out,分辨率为 720x480; 在抓帧保存数据前,先丢弃前面 3 帧(即前面 3 帧虽然返回给 userspace,但不保存到文件)。
v4l2-ctl -d /dev/video0 \
--set-fmt-video=width=720,height=480,pixelformat=NV12 \
--stream-mmap=3 \
--stream-skip=3 \
--stream-to=/tmp/cif.out \
--stream-count=1 \
--stream-poll
v4l2-ctl -d /dev/video0 --set-fmt-video=width=720,height=480,pixelformat=NV12 --stream-mmap=3 --stream-skip=3 --stream-to=/tmp/cif.out --stream-count=1 --stream-poll
参数的说明:
-
-d,指定操作对象为/dev/video0设备。 -
--set-fmt-video,指定了宽高及pxielformat。 -
NV12,即用FourCC表示的pixelformat。FourCC编码详见上文FourCC。 -
--stream-mmap,指定buffer的类型为mmap,即由kernel分配的物理连续的或经过iommu映射的buffer。 -
--stream-skip,指定丢弃(不保存到文件)前3帧 -
--stream-to,指定帧数据保存的文件路径 -
--stream-count,指定抓取的帧数, 不包括--stream-skip丢弃的数量 -
--stream-poll,该选项指示v4l2-ctl采用异步IO,即在dqbuf前先用select等等帧数据完 成,从而保证dqbuf不阻塞。否则dqbuf将会阻塞直到有数据帧到来。 -
实际操作 如下图<<<<<就是输出的帧

5.7.1 设置曝光、gain 等 control
如果 sensor 驱动有实现 v4l2 control,在采集图像前, 可以通过 v4l2-ctl 设置如曝光、gain 等 v4l2 control。 CIF 或 ISP 会继承 sub device 的 control,因此这里通过/dev/video0 可以看到 Sensor 的 v4l2 control。如下是 RK3399 机子上查看到的 OV13850 的相关设置,包括 exposure,gain,blanking, test_pattern 等。
v4l2-ctl -d /dev/video0 -l
root@firefly:/home/firefly/driver_module# v4l2-ctl -d /dev/video0 -l
User Controls
exposure 0x00980911 (int) : min=4 max=1660 step=1 default=1536 value=1536
Image Source Controls
vertical_blanking 0x009e0901 (int) : min=96 max=31199 step=1 default=96 value=96
horizontal_blanking 0x009e0902 (int) : min=2688 max=2688 step=1 default=2688 value=2688 flags=read-only
analogue_gain 0x009e0903 (int) : min=16 max=248 step=1 default=16 value=16
Image Processing Controls
link_frequency 0x009f0901 (intmenu): min=0 max=0 default=0 value=0 flags=read-only
pixel_rate 0x009f0902 (int64) : min=0 max=120000000 step=1 default=120000000 value=120000000 flags=read-only
test_pattern 0x009f0903 (menu) : min=0 max=4 default=0 value=0
- 用
v4l2-ctl可以修改这些control。如修改exposure及analogue_gain如下。
v4l2-ctl -d /dev/video0 --set-ctrl 'exposure=1216,analogue_gain=10'
注意:
- 有特殊字符需要用单引号
V4l2-ctl存在bug,如多个Camera连到同一个ISP,只有查看、修改第一个sensor的control。
至此,关于摄像头OV13850 驱动已经讲解完毕,后续还会深入v4l2专题,这专题只需要大概了解摄像头的一些开发流程和框架,再后续可能会继续深入。
返回总目录