【ROS入门教程】---- 10 TF坐标变换的原理及编程实现
文章目录
- 一、TF坐标变换
-
- 1. 基本坐标变换
- 2. TF功能包
- 3. 实验演示
- 4. 可视化工具
- 二、监听器与广播器的编程实现
-
- 1. 广播器实现
- 2. 监听器实现
- 3. 配置编译规则
- 4. 编译并运行
- 总结
一、TF坐标变换
1. 基本坐标变换
- 在机器人的学习领域中,坐标系之间的坐标变换是最为基础的概念之一,我们可以在几乎任何一本关于机器人学的书籍中找到介绍坐标变换的内容。
 如上图:对于同一物体在两个坐标系之间的变换是坐标变换的基本变换,可以通过旋转矩阵、四元数等多种变换表达方法进行分析,而对于ROS来说,我们就可以免去那么多的自行计算,通过TF功能包,便捷的实现这些要求。
如上图:对于同一物体在两个坐标系之间的变换是坐标变换的基本变换,可以通过旋转矩阵、四元数等多种变换表达方法进行分析,而对于ROS来说,我们就可以免去那么多的自行计算,通过TF功能包,便捷的实现这些要求。
2. TF功能包
- TF功能包:默认记录十秒钟内所有坐标系之间的相对关系,可以帮助我们完成坐标系之间的便捷操作。
例如,我们可以通过TF功能包快速的获得以下的内容:
- 3s前,机器人头部坐标系相对于全局坐标系的关系;
- 当前机器人末端坐标系相对于躯干中心坐标系的关系;
- 机器人躯干中心坐标系相对于全局坐标系的关系;
-
实现:不同于之前的通讯方法,TF功能包通过广播TF变换、监听TF变换,通过一个TF树形结构保存数据,完成最终的计算;
-
这里我们以一个简单的机器人举例,它由一个底座和一个激光雷达构成,如下图所示:

通过激光雷达,我们可以轻松的获得laser坐标系的各轴坐标,然后就可以通过二者之间的坐标系转换从而得到link坐标系的坐标,图示如下:

3. 实验演示
- 准备库环境:
sudo apt-get install ros-noetic-turtle-tf - 启动launch文件进行实验:
roslaunch turtle_tf turtle_tf_dmeo.launch - 注意:在运行这个文件时,可能会遇到一个问题,错误显示
No module named yaml
问题原因是python的版本问题,可以通过命令sudo apt install python-is-python3解决,正常打开后,界面初始会出现两只海龟,其中左下角的那只随时间跟随中间的那只,如下图所示:

- 开启键盘控制:
rosrun turtlesim turtle_teleop_key
根据上图中左图所示,通过键盘控制中间的海龟移动后,左下角的海龟会自动不断调整自身运动方向,最后达到与turtle1相同的位置,其中就涉及到了TF坐标变换的作用。
4. 可视化工具
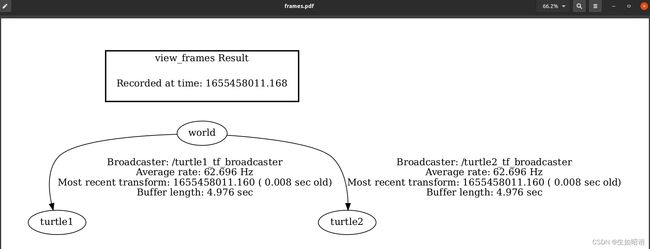
- 1)view_frames:在主文件夹下保存一个PDF文件,存储各坐标系关系;
rosrun tf view_frames
-
PDF文件:存在三个坐标系:世界坐标系为海龟界面的左下角(固定坐标系)、turtle1、turtle2三个坐标系;中间只要有箭头,就说明联系成功,可以通过查询树形机构实现得到各坐标关系;
-
2)TF树查询关系:直接实时查询树中任意两个坐标系之间的关系:translation平移、rotation旋转
rosrun tf tf_echo turtle1 turtle2

- 3)RVIZ工具:即通过RVIZ工具实现可视化,关于RVIZ的使用,在后续博客中会继续推出;
rosrun rviz rviz -d `rospack find turtle_tf`/rviz/turtle_rviz.rviz

二、监听器与广播器的编程实现
- 创建功能包:
catkin_create_pkg learning_tf roscpp rospy tf turtlesim
1. 广播器实现
/**
* @file turtle_tf_broadcaster.cpp
* @author zhaoxu
* @brief 该例程产生tf数据,并计算发布turtle2的速度指令
* @version 0.1
* @date 2022-04-24
*
* @copyright Copyright (c) 2022
*
*/
#include 2. 监听器实现
/**
* @file turtle_tf_listener.cpp
* @author zhaoxu
* @brief 该例程负责监听tf数据,并计算、发布turtle2的速度指令
* @version 0.1
* @date 2022-04-24
*
* @copyright Copyright (c) 2022
*
*/
#include 3. 配置编译规则
- 在指定位置添加如下规则:
# 设置需要编译的代码和生成的可执行文件
add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)
# 设置链接库
target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})
# 设置需要编译的代码和生成的可执行文件
add_executable(turtle_tf_listener src/turtle_tf_listener.cpp)
# 设置链接库
target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES})
4. 编译并运行
- 在文件夹下编译:
cd ~/catkin_ws
catkin_make
- 启动节点管理器及海龟节点
roscore
rosrun turtlesim turtlesim_node
- 使用重映射机制,保证节点名称不同
rosrun learning_tf turtle_tf_broadcaster __name:=turtle1_tf_broadcaster /turtle1
rosrun learning_tf turtle_tf_broadcaster __name:=turtle2_tf_broadcaster /turtle2
- 监听
rosrun learning_tf turtle_tf_listener
rosrun turtlesim turtle_teleop_key
最终的效果与之前的demo类似,这里不予图示。
总结

本节博客主要介绍了TF坐标管理系统,从机器人的基本坐标变换出发,介绍了TF功能包的作用,并介绍了多种可视化方法,最后通过C++编程,自行实现了对于海龟跟踪demo的模拟,ROS入门教程还剩最后一篇,会对于ROS的功能进行总结,并介绍后续的学习方法,敬请期待。