STM32CubeMX——霍尔编码器、L298N驱动电机
前言
人生如逆旅,我亦是行人。 ————苏轼《临江仙·送钱穆父》
目录:
- L298N电机驱动介绍
- 编码器介绍
- 电机介绍
- 新建工程
- 编写代码
- 实验结果
一、L298N电机驱动介绍
B站-视频讲解:l298n电机驱动模块 电机正反转 电机调速
L298N是ST公司生产的一种高电压、大电流电机驱动芯片。该芯片采用15脚封装。主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
-
作用与用途:
- 可实现电机正反转及调速;
- 启动性能好,启动转矩大;
- 工作电压可达到
36V,4A; - 可同时驱动两台直流电机;
- 适合应用于机器人设计及智能小车的设计;
下面为最常见的一款L298N芯片,值得注意的是,它已经内置的5V供电,所以不必从外面再接5V输入。届时5V端子将成为5V输出,为了保证L298N供电的稳定性(供电不足可能引起L298N的烧毁),不建议使用此5V供电作为单片机的电源。
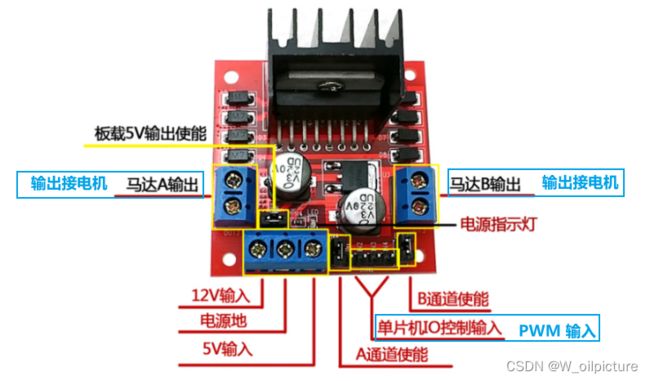
接口介绍:
一、12V供电
理论上最高可以接入35v(没试过最低和最高的电压,此处是某宝卖家提供的参数),购买直流电机前,先看清楚直流电机的相关参数和性能,如果满足L298N的使用要求,再进行购买使用,否则容易烧毁L298N。
二、GND共地
顾名思义,接地线。但要注意的是,此处GND不但要接驱动电源的GND,如果是和别的单片机或者其他系统连接在一起的时候,一定要从这里再引出一根GND和单片机或者系统的GND相连。即整个系统的GND连接在一起,如果不连接在一起,电压没有参考电平,无法进行正常的控制。
三、5V供电
这是一个特殊的端口。既可以做L298N的逻辑电压的输入,也可以做外部单片机或系统的5v供电口。具体切换在板载5v跳帽中介绍。
四、板载5V跳帽
- 12v供电口接≥5V的电源电压时,板载5v跳帽不拔除,5v供电口有电压输出。数值具体大小自己用万用表测,反正当12v口接7.4v时,5v供电口是输出5v的。
- 12v供电口≤5v的电源电压时,板载5v跳帽需要拔除,因为L298N需要逻辑驱动电压来驱动板子。此时5v供电口就变成了L298N的逻辑电压供电的输入口。供电电压在3.3v -5v之间。
五、通道AB使能跳帽
- 需要PWM控制就拔除,不需要PWM控制就不用拔除(老玩家就别管这句话了,就算不拔除也可以做到PWM调试的,应该懂的都懂)。
- PWM控制对于电机而言表现出来现象的就是转速控制,在Arduino里用analogWrite(Pin,Value)语句来实现 [Pin(对应的针脚),Value(0-255之间的整型数字)]
六、逻辑输入
- IN1和IN2为一组,对应OutA(输出A);
- IN3和IN4为一组,对应OutB(输出B)。
七、输出AB
直接接相应的输出即可。

-
注意事项:
- 当你的驱动电压(上图标识为
12V输入,实际可以接受的输入范围是7-12V)为7V-12V的时候,可以使能板载的5V逻辑供电,当使用板载5V供电之后,接口中的+5V供电不要输入电压,但是可以引出5V电压供外部使用。(这种即为常规应用!) - 当驱动电压高于
12V,小于等于24V(芯片手册中提出可以支持到35V,但是按照经验一般L298N保守应用最大电压支持到24V已经很了不起!)时,比如要驱动额定电压为18V的电机。首先必须拔除板载5V输出使能的跳线帽。然后在5V输出端口外部接入5V使能即 一个电平为5V的控制信号,当此信号输入有效时,且电机驱动模块中电源供电正常时,电机驱动模块输出电流。否则即使电源供电正常,电机上也无电流。电压对L298N内部逻辑电路供电。(这种是高压驱动的非常规应用!)
- 当你的驱动电压(上图标识为
!!强调!!:L298N电机驱动、STM32单片机、编码器电机三者在使用过程中,一定要把三者的GND连接在一起,也就是共地!!!驱动电压可以接受的输入范围是7~12V,板子标识为VCC输入,一般都是使用航模电池或买电池盒。
-
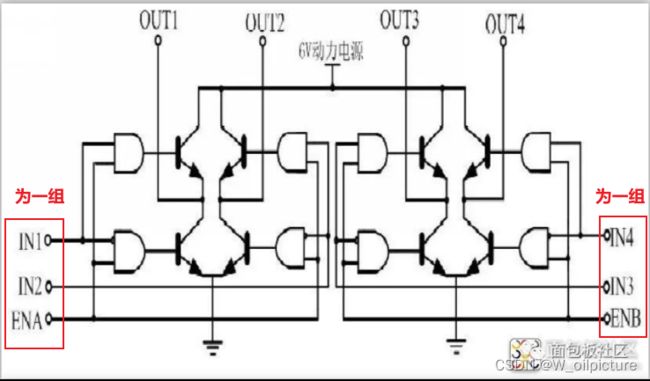
原理图:

-
L298N引脚:
- 情况一: 用L298N驱动两台直流减速电机的电路。引脚A,B可用于PWM控制。如果机器人项目只要求直行前进,则可将IN1,IN2和IN3,IN4两对引脚分别接高电平和低电平,仅用单片机的两个端口给出PWM信号控制使能端A,B即可实现直行、转弯、加减速等动作。
- 情况二: 用L298实现二相步进电机控制。将IN1,IN2和IN3,IN4两对引脚分别接入单片机的某个端口,输出连续的脉冲信号。信号频率决定了电机的转速。改变绕组脉冲信号的顺序即可实现正反转。

-
L298N驱动A/B控制逻辑:IN1和IN2为一组,对应OutA(输出A);IN3和IN4为一组,对应OutB(输出B)。
| 使能端 A/B | 输入引脚 1/3 | 输入引脚 2/4 | 电机运动方式 |
|---|---|---|---|
| 1 | 1 | 0 | 前进(顺时针转动) |
| 1 | 0 | 1 | 后退(逆时针转动) |
| 1 | 1 | 1 | 紧急停车 |
| 1 | 0 | 0 | 紧急停车 |
| 0 | - | - | 停止(自由转动) |
二、编码器介绍
B站-视频介绍:【电工知识】编码器是干什么用的,这下终于明白了!
编码器(encoder)是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器可以把角位移或直线位移转换成电信号,是工业中常用的电机定位设备,可以精确地测试出电机的角位移和旋转位置。其最直接的作用就是可以测量位移,通过位移就可以计算出速度。
简单的来说,学习电机上的编码器,是为了能够通过编码器测出电机的转速,从而能够更好地控制电机进行工作。
1.编码器的种类
按输出信号分:增量式和绝对式
增量式:就是每转过单位的角度就发出一个脉冲信号。通常为A相、B相、Z相输出,A相、B相为相互延迟1/4周期的脉冲输出,根据延迟关系可以区别正反转,而且通过取A相、B相的上升和下降沿可以进行2或4倍频;Z相为单圈脉冲,即每圈发出一个脉冲。
绝对式:就是对应一圈,每个基准的角度发出 一个唯一与该角度对应二进制的数值,通过外部记圈器件可以进行多个位置的记录和测量。
- 绝对式编码器由机械位置决定的每个位置是唯一的,它无需记忆,无需找参考点,而且不用一直计数,什么时候需要知道位置,什么时候就去读取它的位置,从而大大提高了编码器的抗干扰能力、数据可靠性提高。
区别在于:绝对式掉电不丢失读取数值,增量式会丢失。
按传感技术分:光电式和霍尔式(光式、磁式、电容式)
光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是应用最多的传感器,由光源、光码盘和光敏元件组成。
霍尔编码器是一种通过磁电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。 是由霍尔码盘(磁环)和霍尔元件组成。
-
光电式:当光线穿过齿轮盘时,接收器会计一次数,并传送给CPU。不同的转速,自然在相同时间内的计数值不一样,进而达到测速的功能。

-
霍尔式:霍尔码盘是在一定直径的圆板上等分地布置有不同的磁极。霍尔码盘与电动机同轴,电动机旋转时,霍尔元件检测输出若干脉冲信号,为判断转向,一般输出两组存在一定相位差的方波信号 (通常相差90°,我们称为AB相)。
测速可以通过计算相同时间内的脉冲数,判断转向:
可以看到下图,当顺时针旋转时,A相处在下降沿时,B相是高电平。A相处在上升沿时,B相是低电平;当逆时针旋转时,(即把上面的波形从右向左看)A相处在下降沿时,B相是低电平。A相处在上升沿时,B相是高电平。进而判断正反转。

两者的主要区别:
- 检测方式不同:霍尔编码器是电磁检测位置,光电编码器是光电检测位置
- 精度不同:霍尔编码器一般是精度不高,用作粗略的位置反馈,而光电编码器精度高,可以实现高精度的位置检测
2. 霍尔编码器实物图接线

接线表:
| 霍尔编码器的接口 | STM32单片机的IO口 |
设置的工作模式 |
|---|---|---|
| VCC | VCC(3.3V) | - |
| GND | GND | - |
| A相 | 接单片机的脉冲检测接口 | 定时器编码模式 |
| B相 | 接单片机的脉冲检测接口 | 定时器编码模式 |
| 霍尔编码器的接口 | L298N电机驱动的接口 |
|---|---|
M+(电机线+) |
接电机驱动的输出OUT1 |
M-(电机线-) |
接电机驱动的输出OUT2 |
3. 倍频原理
我们通过软件的方法实现四倍频,首先可以看出图中编码器输出的AB相波形,正常情况下我们使用M法测速的时候,会通过测量单位时间内A相输出的脉冲数来得到速度信息,常规的方法,我们只测量A相(或者B相)的上升沿或者下降沿,也就是图中对应数字1234中的某一个,这样就只能计数3次,而四倍频的方法是测量A相和B相编码器的上升沿和下降沿。 这样在同样的时间内,可以计数12次(3个1234的循环)。这就是四倍频的原理。
因为编码器输出的是标准的方波,所以我们可以直接用单片机进行读取,在软件中的处理方法分两种,自带编码器接口的单片机如STM32,可以直接使用硬件计数,而没有编码器接口的单片机如51单片机,可以通过外部中断读取,比如把编码器A相输出接到单片机的外部中断输入口,这样就可以通过跳变沿触发中断,然后在对应的中断服务函数里面,通过B相电平来确定正反转。如当一个A相来一个跳变沿的时候,如果B相是高电平就认为是正转,低电平就认为是反转。

三、电机介绍
电机(英文:Electric machinery,俗称“马达”)是指依据电磁感应定律实现电能转换或传递的一种电磁装置。
电机在电路中是用字母M(旧标准用D)表示,它的主要作用是产生驱动转矩,作为用电器或各种机械的动力源,发电机在电路中用字母G表示,它的主要作用是利用机械能转化为电能。
我所使用的也是一种减速电机,即电机头部有一个减速器,电机转动带动减速器里的齿轮后再通过减速器的输出轴输出相应的转速。比如减速比是 1: 30,表示电机转动 30圈,电机的减速器转动一圈。

M法测速

- T0为自行设置的时间;
- M0为在设定时间内的脉冲数;
- C为单圈总脉冲数。(直流电机轴旋转一圈 在霍尔传感器每个引脚有 13个脉冲信号 输出)
最终接线表:(只使用 IN1 和 IN2 这一组,对应 OutA(输出A))
| 霍尔编码器的接口 | STM32单片机的IO口 |
|---|---|
| 编码器VCC(5V) | VCC(5V) |
| 编码器GND | GND |
| 编码器A相 | 定时器编码器模式的通道(TIMx_CH1) |
| 编码器B相 | 定时器编码器模式的通道(TIMx_CH2) |
| 霍尔编码器的接口 | L298N电机驱动的接口 |
|---|---|
M+(电机线+) |
接电机驱动的输出OUT1 |
M-(电机线-) |
接电机驱动的输出OUT2 |
STM32单片机的IO口 |
L298N电机驱动 |
|---|---|
| GND | L298N的GND |
| 输出IO口高电平 | IN1 |
| 输出IO口低电平 | IN2 |
PWM波产生通道(定时器PWM波产生通道) |
通道A使能端 |
12V供电电池 |
L298N电机驱动 |
|---|---|
| 负极(黑线) | L298N的GND(三个电源接入的最中间) |
| 正极(红线) | L298N的12V接口(三个电源接入的左边) |
四、新建工程
硬件:
- 芯片:
STM32F103RBT6(正点原子NANO开发板) STM32CubeMX软件IDE:MDK-Keil软件STM32F1xxHAL库·- 上述所介绍的:
L298N电机驱动模块、带有霍尔编码编码器的直流减速电机以及用来供电的12V电池(红线:正;黑线:负)
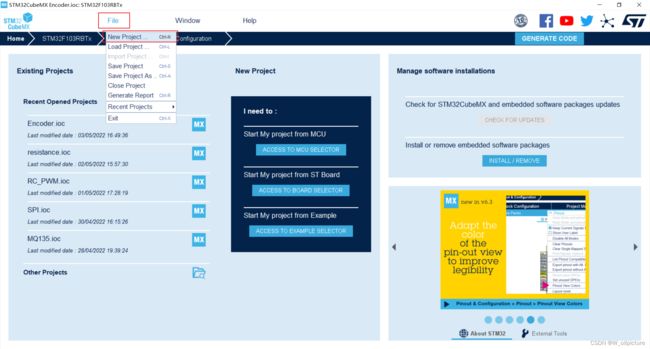
1.打开STM32CubeMX软件,点击“新建工程”
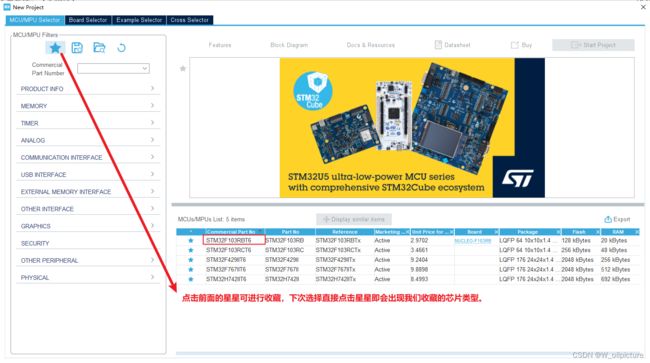
2. 选择 MCU 和封装
3.配置时钟
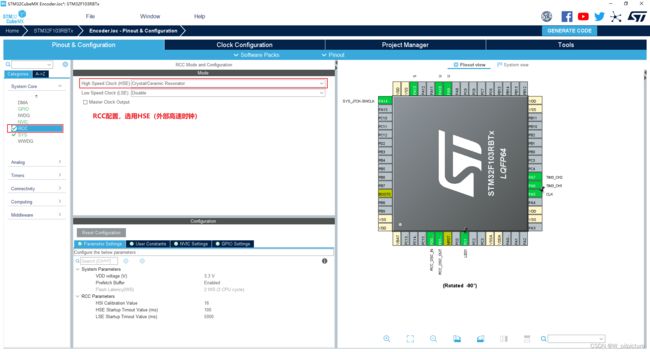
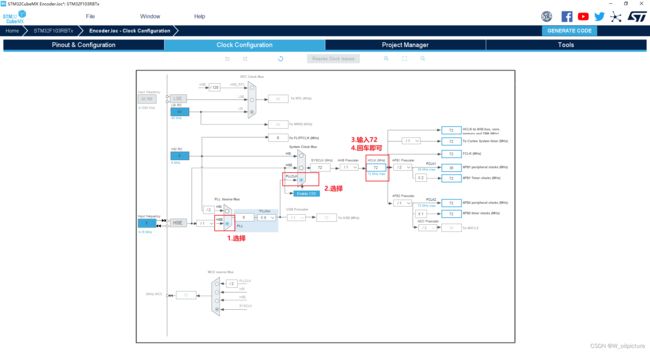
具体学习可以参考:博客网站-RCC学习
4.配置调试模式

5.串口(USART1)配置

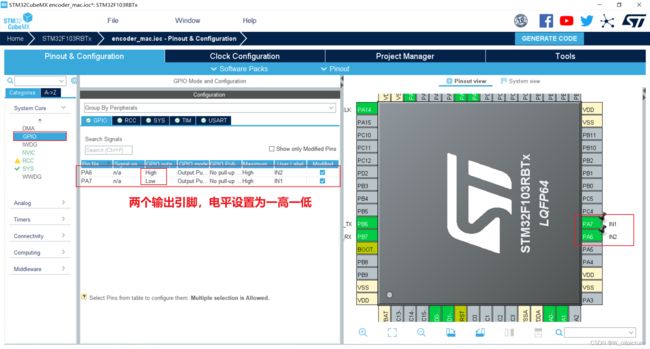
6. 引脚(IO)配置
配置两输出IO引脚,作为输出电机驱动的IN1和IN2。
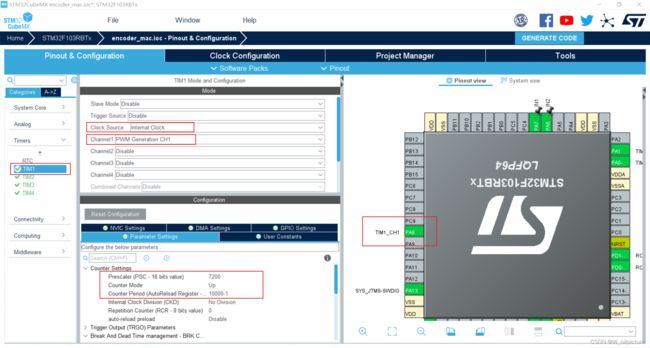
7. 定时器配置为PWM输出模式
配置定时器1的通道1产生 PWM 波,用以连接 L298N 电机驱动模块的输出A的使能输入。(将跳线帽拔掉)
8. 定时器配置为编码器模式(Encoder)
配置定时器2(TIM2)为编码器模式(Encoder Mode),连接电机上面的编码器的A相与B相。
分频系数表示对计数值进行分频,编码器模式默认时四倍频。
编码器上的AB相应该接编码器模式对应的引脚。 编码器模式就相当于一个专门计数的工具,当编码器的码盘转动时,A、B相输出矩形波形脉冲,进入PA0和PA1进行计数(数脉冲)。

9. 定时器配置中断函数

记得开启定时器中断,注:编码器的更新中断定时器最好要比10ms定时器的优先级高,用来防止在更新中被打断。

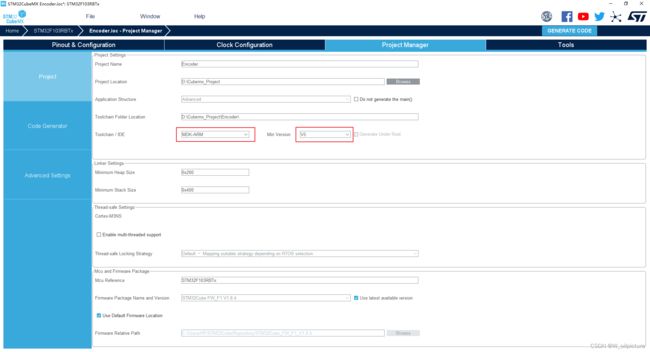
10.生成代码
输入项目名称和路径。(注:路径中不允许出现中文。)
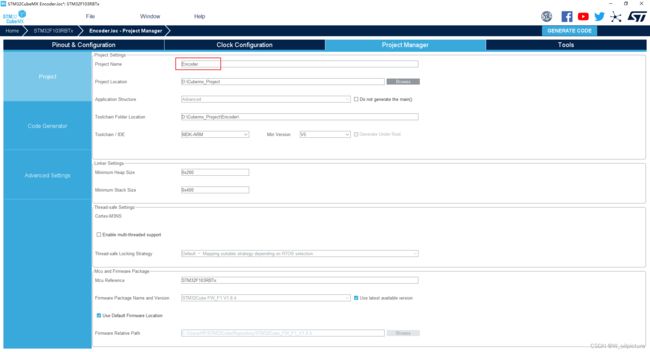
选择应用的IDE,开发环境MDK-ARM V5
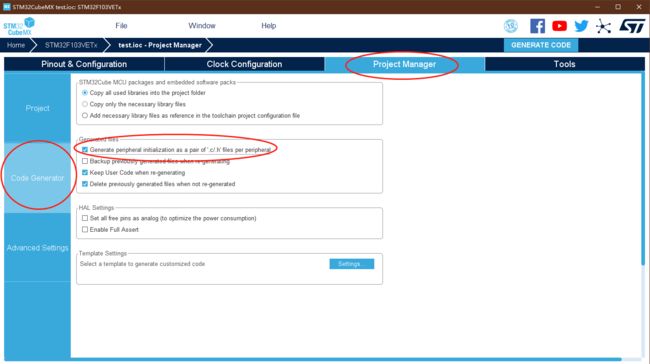
每个外设生成独立的 ’.c/.h’ 文件
- 不勾: 所有初始化代码都生成在
main.c - 勾选: 初始化代码生成在对应的外设文件。 如
GPIO初始化代码生成在gpio.c中。
点击 GENERATE CODE 生成代码

11.构建工程
- DeBug的模式根据不同的芯片进行选择:

-
实物连接图:


五、编写代码
- 在主函数
main.c中添加代码:
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM1_Init();
MX_TIM2_Init();
MX_TIM3_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim3); //开启10ms中断
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1); //开启PWM
HAL_TIM_Encoder_Start(&htim2, TIM_CHANNEL_1); //开启编码器定时器
HAL_TIM_Encoder_Start(&htim2, TIM_CHANNEL_2); //开启编码器定时器
__HAL_TIM_ENABLE_IT(&htim2,TIM_IT_UPDATE); //开启编码器定时器更新中断,防溢出处理
__HAL_TIM_SET_COUNTER(&htim2, 30000); //将编码器定时器初始值设定为30000
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
- 编写中断处理函数
HAL_TIM_PeriodElapsedCallback();:
//中断处理函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM3)
{
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_1,20000);
}
}
六、实验结果
完成上述过程,结果是电机会转动起来,如果电机没有转动起来,可以通过检查线路,或者会出现板子烧毁的情况,会其他的情况。如果板子仍可以正常工作且接线无误,则考虑是不是L298N电机驱动的问题,可以通过使用万用表进行测量OUT1和OUT2两个引脚和GND之间是否有电压差,如果测得电压很小,则可能是驱动烧坏。换了新的驱动之后,测试有没有用的时候,切记一定要记得L298N驱动模块与STM32单片机要共地。(同一个电位参考)
谢谢阅读
