基于MATLAB的答题卡识别方法
一、课题背景
随着科技的发展,电子与计算机技术的进步,答题卡的出现大大减轻教学工作者们批改试卷的工作量。答题卡是光标阅读机输入信息的载体,是配套光标阅读机的各种信息录入表格的总称。 答题卡将用户需要的信息转化为可选择的选项,供用户涂写。OMR是用光学扫描的方法来识别按一定格式印刷或书写的标记,并将其转换为计算机能接受的电信号的设备,并根据信息点的涂与未涂和格式文件设置将信息还原。因此,如何将答题卡填涂的黑色区域识别出来并使用计算机进行处理是极为关键的。本论文探索了有效识别答题卡的方法,以matlab为工具,基于数字图像处理技术对答题卡填涂区域进行了识别,并对识别的结果进行了处理,得到了结果。本论文利用Hough变换的直线检测技术检测图像的倾斜度,判断图像是否倾斜,对存在倾斜的图像进行旋转校正。最终实现答题卡答案的定位和检测。论文使用像素统计方法进行识别,利用黑白颜色灰度值的巨大差异对二值图像的灰度值进行累加并进行阈值判定,识别错误效率极低,能够准确的识别答题卡的涂卡标记。
二、设计思路
说明系统运行环境,编程软件平台,编码算法原理,算法流程图设计
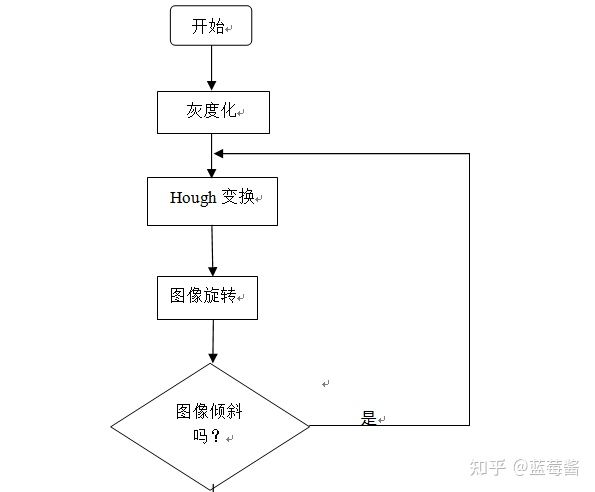
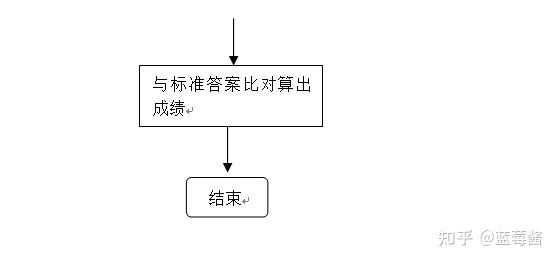
本系统运行在当今主流的Windows7系统,使用较新的MATLAB2012b进行设计。在进行旋转校正时,先使用Hough变换检测出答题卡边缘直线,调用lines函数的参数得到倾斜角度并进行旋转变换从而消除答题卡倾斜状态。将扫描部分分为7个扫描区域,分别使用像素检索技术,对各个检索区域内的灰度值进行累加,并对累加和进行阈值判定,从而得出检索区域颜色,完成判定。最后再与标准答案进行比对,得出成绩。
流程图:

三、程序设计
clc;clear;close;
A=imread('原图.jpg');%读取图像
imshow(A),title('原图');
gray=rgb2gray(A);
bw=edge(gray,'canny');%canny算子边缘检测得到二值边缘图像
[h,t,r]=hough(bw,'RhoResolution',0.5,'ThetaResolution',0.5); %Hough变换
figure,imshow(imadjust(mat2gray(h)),'XData',t,'YData',r,'InitialMagnification','fit'),title('Hough变换矩阵');%显示Hough变换矩阵
xlabel('\theta'),ylabel('\rho');
axis on, axis normal,hold on;
P=houghpeaks(h,2);
x=t(P(:,2));y=r(P(:,1));
plot(x,y,'s','color','r'),title('');%获取并标出参数平面的峰值点
lines=houghlines(bw,t,r,P,'FillGap',5,'Minlength',7);%检测图像中的直线段
figure,imshow(gray);
hold on;
max_len=0;
for i=1:length(lines)
xy=[lines(i).point1;lines(i).point2];
plot(xy(:,1),xy(:,2),'LineWidth',2,'Color','g');%用绿色线段标注直线段
plot(xy(:,1),xy(1,2),'x','LineWidth',2,'Color','y');
plot(xy(:,1),xy(2,2),'x','LineWidth',2,'Color','r');%标注直线段端点
end
x=lines.theta;%由与图像边缘平行的直线段的斜率得到整个图像旋转的角度
B=imrotate(gray,x);%图像修正
figure,imshow(B),title('旋转后图像');
T=graythresh(B);%使用OTSU方法获得阀值T
result=im2bw(B,T);%二值化图像
figure,imshow(result),title('二值化后结果');
%扫描区域:在本程序中,有7个扫描区域,分别对应题号为1-5,6-10,11-15,16-20,21-25,26-30,31-35这几个区域
n=52;m=244;% 首先测得答题区域第一题A选项左上角的坐标(52,244)
s=60;t=90;%s为上下两个扫描区域的距离,t为左右两个扫描区域的距离。
P=4;Q=5;%P为字母项的个数(这里有ABCD共有4项),Q为每个小区域选项数。
interval_length=14;%左右相邻两题填涂区域左边线的距离
interval_width=9;%上下相邻两题填涂区域上边线的距离
length=11;%填涂区域的长度
width=6;%填涂区域的宽度
a2=zeros(4,5);%初始化灰度值统计矩阵
a1=result(m+(P-1)*(interval_width+1) :m+(P-1)*(interval_width+1)+width,n+(Q-1)*(interval_length+1):n+(Q-1)*(interval_length+1)+length);
%得到矩形区域内各像素的灰度值
sum1=sum(sum(a1));%计算统计的矩形区域内像素灰度值之和
a2(P,Q)=sum1;%多次循环后得到20个统计区域的灰度值,并依次放在a2矩阵中
end
end
a2(a2<80)=1;
a2(a2>=81)=0;%对灰度值统计矩阵里的数值进行处理,大于某一阀值的值赋1,其余的赋0。
%在此程序中,涂黑则相应数值为1。
result1_5=a2;%存储1-5题的结果
%第6-10题区域的检测
for P=1:4
for Q=1:5
a1=result(m+s*1+(P-1)*(interval_width+1) :m+s*1+(P-1)*(interval_width+1)+width,n+(Q-1)*(interval_length+1):n+(Q-1)*(interval_length+1)+length);
sum1=sum(sum(a1));
a2(P,Q)=sum1;
end
end
a2(a2<80)=1;
a2(a2>=81)=0;
result6_10=a2; %存储6-10题的结果
%第11-15题区域的检测
for P=1:4
for Q=1:5
a1=result(m+(P-1)*(interval_width+1) :m+(P-1)*(interval_width+1)+width,n+t*1+(Q-1)*(interval_length+1):n+t*1+(Q-1)*(interval_length+1)+length);
sum1=sum(sum(a1));
a2(P,Q)=sum1;
end
end
a2(a2<80)=1;
a2(a2>=81)=0;
result11_15=a2; %存储11-15题的结果
%第16-20题区域的检测
for P=1:4
for Q=1:5
a1=result(m+s*1+(P-1)*(interval_width+1) :m+s*1+(P-1)*(interval_width+1)+width,n+t*1+(Q-1)*(interval_length+1):n+t*1+(Q-1)*(interval_length+1)+length);
sum1=sum(sum(a1));
a2(P,Q)=sum1;
end
end
a2(a2<80)=1;
a2(a2>=81)=0;
result16_20=a2; %存储16-20题的结果
%第21-25题区域的检测
for P=1:4
for Q=1:5
a1=result(m+s*2+(P-1)*(interval_width+1) :m+s*2+(P-1)*(interval_width+1)+width,n+t*1+(Q-1)*(interval_length+1):n+t*1+(Q-1)*(interval_length+1)+length);
sum1=sum(sum(a1));
a2(P,Q)=sum1;
end
end
a2(a2<80)=1;
a2(a2>=81)=0;
result21_25=a2; %存储21-25题的结果
%第26-30题区域的检测
for P=1:4
for Q=1:5
a1=result(m+s*3+(P-1)*(interval_width+1) :m+s*3+(P-1)*(interval_width+1)+width,n+t*1+(Q-1)*(interval_length+1):n+t*1+(Q-1)*(interval_length+1)+length);
sum1=sum(sum(a1));
a2(P,Q)=sum1;
end
end
a2(a2<80)=1;
a2(a2>=81)=0;
result26_30=a2; %存储26-30题的结果
%第31-35题区域的检测
for P=1:4
for Q=1:5
a1=result(m+s*4+(P-1)*(interval_width+1) :m+s*4+(P-1)*(interval_width+1)+width,n+t*1+(Q-1)*(interval_length+1):n+t*1+(Q-1)*(interval_length+1)+length);
sum1=sum(sum(a1));
a2(P,Q)=sum1;
end
end
answer=[result1_5,result6_10,result11_15,result16_20,result21_25,result26_30,result31_35];%将所检测的7个区域的结果汇总
dlmwrite('Result.txt',answer);%以txt文本的形式输出结果矩阵
disp(answer);%在command窗口实时显示结果
%附加一个统计错误的并显示分数的部分,假定正确答案是35个C
T=zeros(4,35);%初始化矩阵
T(1,:)=1;%设定正确答案的参数
mark1=answer-T;
wrongx=sum(mark1~=0);%当结果选错时,每一列将分别多一个1与-1。选择正确时,此列都是0。
A=sum(sum(wrongx));%统计非零的结果。
wrong=A/2;%由于-1与1是成对出现的,所以需要将上一步所得结果除以2.
score=35-wrong;%算出结果
fprintf('选择题得分为%d',score);%在command窗口输出成绩
四、模块测试与分析
1、首先进行Hough变换,得到Hough变换矩阵如下所述(见图1)。
图1
可以观察到2个峰值。
2、使用Houghlines函数检测直线,得到如下结果(见图2)
图2
并使用lines.theta语句得到直线角度,即为图像倾斜角度。
x=lines.theta x =4
3、修正图像(如图3所示)
图3
这时观察到倾斜的图像已经得到改正。
4、在二值化后使用像素检索技术对灰度值进行统计。分为7个扫描区域,如图4中7个方框所示。

图4
5、进行灰度统计,得到结果矩阵。最后处理由fprintf语句得到分数。