STDC语义分割网络:BiSeNet的轻量化加强版(CVPR2021语义分割)
今天和大家分享CVPR2021中语义分割领域的一篇论文,论文标题及作者如下图所示:
论文下载地址:https://arxiv.org/abs/2104.13188
代码即将开源:https://github.com/MichaelFan01/STDC-Seg
0.动机
深度学习促进了计算机视觉领域中语义分割算法的发展;随着自动驾驶、视频监控等应用场景的迫切需求,面向终端的轻量化语义分割网络被广泛研究。
为了减少算法的耗时,一些诸如DFANet、BiSeNetV1的语义分割算法使用了轻量化backbone,但是它们都是直接使用为分类任务设计的backbone,作者认为,专为分类任务设计的backbone不能在语义分割领域中充分发挥它们的性能。
BiSeNet使用了multi-path结构的网络融合低层次特征和高层次特征,然而额外增加分支会增加网络的运行时间。
作者提出了STDC模块,能够使用较少的参数量提取多尺度特征,且能够很方便地集成到U-Net类型的语义分割网络中;对BiSeNet中的multi-path结构做出改进,在提取底层细节特征的同时减少网络计算量。
1.STDC(Short-Term Dense Concatenate)模块
STDC模块的结构如下图所示:
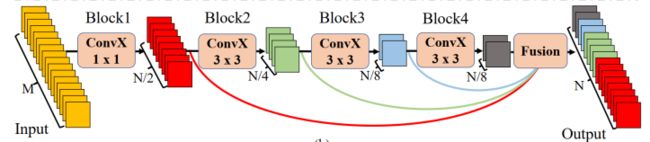
图中的 C o n v X ConvX ConvX表示“卷积+BN+ReLU”操作, M M M表示输入特征通道数, N N N表示输出特征通道数。
在STDC模块中,第1个block的卷积核尺寸为 1 × 1 1 \times 1 1×1,其余block的卷积核尺寸为 3 × 3 3 \times 3 3×3。
若STDC模块的最终输出通道数为 N N N,除最后一个block外,该模块内第 i i i个block的输出通道数为 N / 2 i N / 2^{i} N/2i;最后一个block的输出特征通道数与倒数第二个block保持一致。
与传统的backbone不同的是,STDC模块中深层的特征通道数少,浅层的特征通道数多。作者认为,浅层需要更多通道的特征编码细节信息;深层更关注高层次语义信息,过多的特征通道数量会导致信息冗余。
STDC模块最终的输出为各block输出特征的融合,即:
x output = F ( x 1 , x 2 , … , x n ) x_{\text {output }}=F\left(x_{1}, x_{2}, \ldots, x_{n}\right) xoutput =F(x1,x2,…,xn)
上式中的 F F F表示融合函数, x 1 , x 2 , … , x n x_{1}, x_{2}, \ldots, x_{n} x1,x2,…,xn表示 n n n个block的输出, x output x_{\text {output }} xoutput 表示STDC模块的输出。使用concatenation操作融合 n n n个block的特征。
下图表示stride=2版本的STDC模块:

对于stride=2版本的STDC模块,在 B l o c k 2 Block2 Block2中进行下采样操作;为了在融合时保证feature map尺寸一致,对大尺寸的feature map使用stride=2、 3 × 3 3 \times 3 3×3的average pooling操作进行下采样。
STDC模块有2个特点:(1)随着网络加深,逐渐减少特征通道数,以减少计算量;(2)STDC的输出融合了多个block的输出feature map,包含多尺度信息。
下图表示由STDC模块组成的STDC网络:

该网络包含6个Stage,Stage1~Stage5中都对feature map进行了步长为2的下采样,Stage6输出预测结果。
为了减少计算量,Stage1和Stage2中只使用1个卷积层。Stage3~Stage5中每个Stage包含若干个STDC模块,其中第1个STDC模块包含下采样操作,其余STDC模块保持feature map尺寸不变。
以上图为框架,作者构建了2个STDC网络,分别命名为STDC1和STDC2,它们的结构如下表所示:
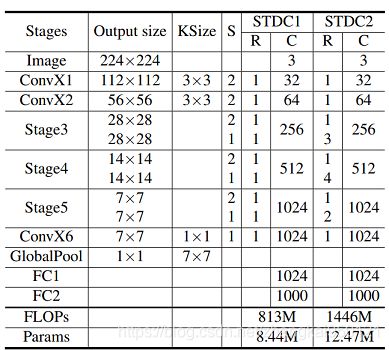
表中的 C o n v X ConvX ConvX表示“卷积+BN+ReLU”操作,Stage3~Stage5均由若干个STDC模块组成。上表中的 K S i z e KSize KSize表示kernel尺寸, S S S表示步长, R R R表示重复次数, C C C表示输出通道数。
2.STDC分割网络架构
使用BiSeNet中的context path提取上下文信息,使用STDC网络作为backbone,构建STDC分割网络,如下图中图(a)所示:
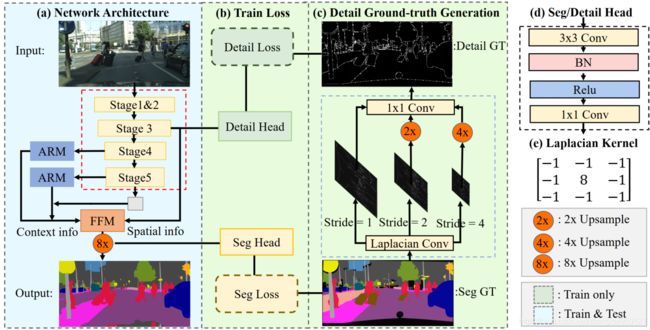
网络中的Stage3、Stage4和Stage5均对feature map进行下采样操作,然后使用global average pooling提取全局上下文信息。使用U型结构上采样特征,并与Stage4、Stage5后面的ARM(Attention Refine Module,借鉴自BiSeNet)输出进行融合,融合结果作为FFM(Feature Fusion Module,借鉴自BiSeNet)的输入,为FFM提供高层次语义信息,FFM的另外一个输入为Stage3输出的特征,该特征为FFM提供低层次细节信息。FFM的输出特征通过 8 × 8 \times 8×上采样进入Seg Head,Seg Head包括1个 3 × 3 3 \times 3 3×3的卷积、BN和ReLU操作,以及1个 1 × 1 1 \times 1 1×1卷积,最终输出 N N N维度特征, N N N为分割类别数。
为了弥补去除BiSeNet中的Spatial分支造成的细节损失,作者在Stage3后面插入了Detail Head,使得Stage3能够学到细节信息。需要注意的是,Detail Head只在训练时使用,目的是让Stage3输出的feature map包含更多的细节特征,用于与Context分支的高层次语义特征融合。
作者使用上图中图(c)的结构得到Detail Head的ground truth,即对标签分别做步长为1、2、4的Laplacian Conv,分别对步长为2和步长为4的输出结果进行 2 × 2 \times 2×和 4 × 4 \times 4×的上采样,使用带有可学习参数的 1 × 1 1 \times 1 1×1卷积融合,通过0.1的阈值输出最终的2值ground truth。
上述操作生成的ground truth中,细节特征所占的像素远少于非细节所占的像素,因此Detail Head部分面临着类别不均衡问题。因此联合使用binary cross-entropy loss和dice loss,dice loss可以缓解类别不均衡问题,detail loss为:
L detail ( p d , g d ) = L dice ( p d , g d ) + L b c e ( p d , g d ) L_{\text {detail }}\left(p_{d}, g_{d}\right)=L_{\text {dice }}\left(p_{d}, g_{d}\right)+L_{b c e}\left(p_{d}, g_{d}\right) Ldetail (pd,gd)=Ldice (pd,gd)+Lbce(pd,gd)
上式中的 p d ∈ R H × W p_{d} \in \mathbb{R}^{H \times W} pd∈RH×W表示预测结果, g d ∈ R H × W g_{d} \in \mathbb{R}^{H \times W} gd∈RH×W表示ground truth, H H H和 W W W分别表示detail map的高度和宽度; L bce L_{\text {bce}} Lbce表示binary cross-entropy loss, L d i c e L_{dice} Ldice表示dice loss, L d i c e L_{dice} Ldice表达式为:
L d i c e ( p d , g d ) = 1 − 2 ∑ i H × W p d i g d i + ϵ ∑ i H × W ( p d i ) 2 + ∑ i H × W ( g d i ) 2 + ϵ L_{d i c e}\left(p_{d}, g_{d}\right)=1-\frac{2 \sum_{i}^{H \times W} p_{d}^{i} g_{d}^{i}+\epsilon}{\sum_{i}^{H \times W}\left(p_{d}^{i}\right)^{2}+\sum_{i}^{H \times W}\left(g_{d}^{i}\right)^{2}+\epsilon} Ldice(pd,gd)=1−∑iH×W(pdi)2+∑iH×W(gdi)2+ϵ2∑iH×Wpdigdi+ϵ
上式中 ϵ \epsilon ϵ的存在是为了防止分母为0, ϵ = 1 \epsilon=1 ϵ=1。
上图中图(b)的Detail Head包括1个 3 × 3 3 \times 3 3×3的卷积、BN和ReLU操作,以及1个 1 × 1 1 \times 1 1×1卷积。
STDC分割网络和BiSeNet在总体结构上的差异如下图所示:
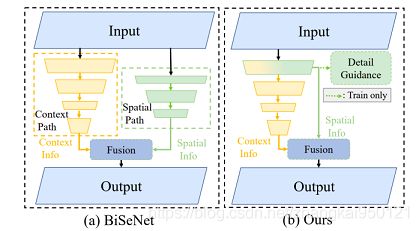
STDC分割网络使用Detail Guidance替代BiSeNet中的Spatial分支,在保留细节特征的同时减少了计算量。
3.实验结果
3.1 STDC分类网络性能
在ImageNet数据集上训练STDC分类网络,并在验证集上测试,结果如下表所示:

从上表中可以看出,STDC系列网络兼顾性能和计算速度。
3.2 STDC分割网络性能
在Cityscapes数据集上训练STDC分割网络,分别使用 512 × 1024 512 \times 1024 512×1024和 768 × 1536 768 \times 1536 768×1536分辨率的图片作为网络输入,将输出结果上采样至 1024 × 2048 1024 \times 2048 1024×2048。在测试集上测试的模型使用了训练集和验证集进行训练,性能和速度如下表所示:

上表中的Seg50表示输入图片分辨率为 512 × 1024 512 \times 1024 512×1024,Seg75表示输入图片分辨率为 768 × 1536 768 \times 1536 768×1536。
从上表中可以看出,STDC分割网络在保持高推理速度的同时有着更高的精度。
一个更直观的比较如下图所示:

上表中的性能是在Cityscapes测试集上的结果,FPS在1080Ti GPU上使用batch为1时测得。
3.3 Detail Guidance对细节特征的影响
下图直观地表示了使用Detail Guidance与否对Stage3特征和分割结果的影响:
图(a)表示输入图像,图(b)和图(d)分别表示未使用Detail Guidance时Stage3和网络预测结果,图(c)和图(e)表示使用了Detail Guidance时Stage3和网络预测结果,图(f)表示ground truth。
从图中可以看出,使用了Detail Guidance后,Stage3的feature map细节更丰富,分割结果中的细节也更好。
4.总结
作者提出了STDC轻量化backbone用于分割任务;使用Detail Guidance替代BiSeNet中的Spatial分支,保留低层次细节特征的同时有效地减少了网络计算量。
推荐阅读:
SAC:简单高效的域自适应语义分割自监督方法(CVPR2021语义分割)
引用超7000次的SegNet:Encoder-Decoder架构的端到端语义分割网络
FCN:使用端到端CNN进行语义分割的开山之作
如果你对计算机视觉中的目标检测、跟踪、分割、轻量化神经网络感兴趣,欢迎关注公众号一起学习交流~
