faster rcnn源码理解(三)之proposal_layer(网络中的proposal)
layer {
name: "rpn_conv/3x3"
type: "Convolution"
bottom: "P3_aggregate"
top: "rpn/output"
param { lr_mult: 1.0 }
param { lr_mult: 2.0 }
convolution_param {
num_output: 64
kernel_size: 3 pad: 1 stride: 1
weight_filler { type: "gaussian" std: 0.01 }
bias_filler { type: "constant" value: 0 }
}
}
layer {
name: "rpn_relu/3x3"
type: "ReLU"
bottom: "rpn/output"
top: "rpn/output"
}
layer {
name: "rpn_cls_score"
type: "Convolution"
bottom: "rpn/output"
top: "rpn_cls_score"
param { lr_mult: 1.0 }
param { lr_mult: 2.0 }
convolution_param {
num_output: 18 # 2(bg/fg) * 9(anchors)
kernel_size: 1 pad: 0 stride: 1
weight_filler { type: "gaussian" std: 0.01 }
bias_filler { type: "constant" value: 0 }
}
}
layer {
name: "rpn_bbox_pred"
type: "Convolution"
bottom: "rpn/output"
top: "rpn_bbox_pred"
param { lr_mult: 1.0 }
param { lr_mult: 2.0 }
convolution_param {
num_output: 36 # 4 * 9(anchors)
kernel_size: 1 pad: 0 stride: 1
weight_filler { type: "gaussian" std: 0.01 }
bias_filler { type: "constant" value: 0 }
}
}
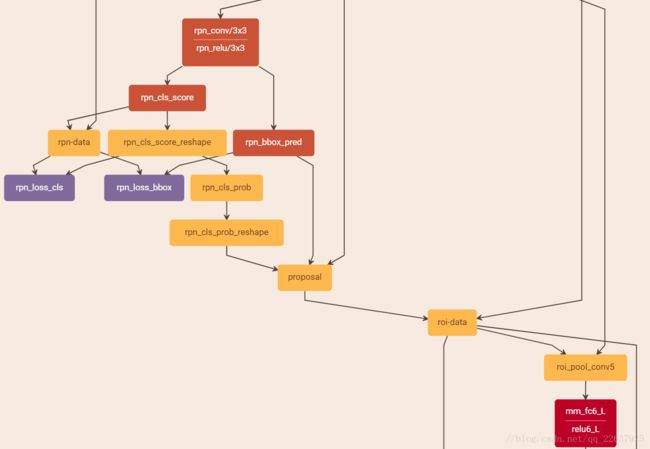
首先有几个问题: 从rpn_conv/3x3输出了rpn/output, 这个output作为rpn_bbox_pred和rpn_cls_score的输入,不知道是什么样子?而且rpn_bbox_pred和rpn_cls_score都是卷积层而已,到底是怎么输出得分和候选框的?这里的rpn_bbox_pred涉及到的候选框和rpn_data层里生成的候选框有什么区别?
layer {
name: 'proposal'
type: 'Python'
bottom: 'rpn_cls_prob_reshape'
bottom: 'rpn_bbox_pred'
bottom: 'im_info'
top: 'rpn_rois'
# top: 'rpn_scores'
python_param {
module: 'rpn.proposal_layer'#nms
layer: 'ProposalLayer'
param_str: "'feat_stride': 8"
}
}
# --------------------------------------------------------
# Faster R-CNN
# Copyright (c) 2015 Microsoft
# Licensed under The MIT License [see LICENSE for details]
# Written by Ross Girshick and Sean Bell
# --------------------------------------------------------
import caffe
import numpy as np
import yaml
from fast_rcnn.config import cfg
from generate_anchors import generate_anchors
from fast_rcnn.bbox_transform import bbox_transform_inv, clip_boxes
from fast_rcnn.nms_wrapper import nms
DEBUG = False
class ProposalLayer(caffe.Layer):
"""
Outputs object detection proposals by applying estimated bounding-box
transformations to a set of regular boxes (called "anchors").
"""
def setup(self, bottom, top):
# parse the layer parameter string, which must be valid YAML
layer_params = yaml.load(self.param_str)
self._feat_stride = layer_params['feat_stride']
anchor_scales = layer_params.get('scales', (8, 16, 32))
self._anchors = generate_anchors(scales=np.array(anchor_scales))
self._num_anchors = self._anchors.shape[0]
if DEBUG:
print 'feat_stride: {}'.format(self._feat_stride)
print 'anchors:'
print self._anchors
# rois blob: holds R regions of interest, each is a 5-tuple
# (n, x1, y1, x2, y2) specifying an image batch index n and a
# rectangle (x1, y1, x2, y2)
top[0].reshape(1, 5)
# scores blob: holds scores for R regions of interest
if len(top) > 1:
top[1].reshape(1, 1, 1, 1)
def forward(self, bottom, top):
# Algorithm:
#
# for each (H, W) location i
# generate A anchor boxes centered on cell i
# apply predicted bbox deltas at cell i to each of the A anchors
# clip predicted boxes to image
# remove predicted boxes with either height or width < threshold
# sort all (proposal, score) pairs by score from highest to lowest
# take top pre_nms_topN proposals before NMS
# apply NMS with threshold 0.7 to remaining proposals
# take after_nms_topN proposals after NMS
# return the top proposals (-> RoIs top, scores top)
# assert bottom[0].data.shape[0] == 1, \
# 'Only single item batches are supported'
num_images = bottom[0].data.shape[0]
#assert num_images == cfg.TRAIN.IMS_PER_BATCH
if self.phase == 0:
cfg_key = 'TRAIN'
else:
cfg_key = 'TEST'
# = str(self.phase) # either 'TRAIN' or 'TEST'
pre_nms_topN = cfg[cfg_key].RPN_PRE_NMS_TOP_N
post_nms_topN = cfg[cfg_key].RPN_POST_NMS_TOP_N
assert post_nms_topN % num_images == 0
post_nms_topN_per_images = post_nms_topN / num_images
nms_thresh = cfg[cfg_key].RPN_NMS_THRESH
min_size = cfg[cfg_key].RPN_MIN_SIZE
# the first set of _num_anchors channels are bg probs
# the second set are the fg probs, which we want
all_scores = bottom[0].data[:, self._num_anchors:, :, :]
all_bbox_deltas = bottom[1].data
all_im_info = bottom[2].data
if DEBUG:
print 'im_size: ({}, {})'.format(all_im_info[0], all_im_info[1])
print 'scale: {}'.format(all_im_info[2])
# 1. Generate proposals from bbox deltas and shifted anchors
height, width = all_scores.shape[-2:]
if DEBUG:
print 'score map size: {}'.format(all_scores.shape)
# Enumerate all shifts
shift_x = np.arange(0, width) * self._feat_stride
shift_y = np.arange(0, height) * self._feat_stride
shift_x, shift_y = np.meshgrid(shift_x, shift_y)
shifts = np.vstack((shift_x.ravel(), shift_y.ravel(),
shift_x.ravel(), shift_y.ravel())).transpose()
# Enumerate all shifted anchors:
#
# add A anchors (1, A, 4) to
# cell K shifts (K, 1, 4) to get
# shift anchors (K, A, 4)
# reshape to (K*A, 4) shifted anchors
A = self._num_anchors
K = shifts.shape[0]
anchors = self._anchors.reshape((1, A, 4)) + \
shifts.reshape((1, K, 4)).transpose((1, 0, 2))
anchors = anchors.reshape((K * A, 4))
all_blobs = np.empty((0, 5), dtype=np.float32)
for i in xrange(num_images):
bbox_deltas = all_bbox_deltas[i:i+1, :]
# Transpose and reshape predicted bbox transformations to get them
# into the same order as the anchors:
#
# bbox deltas will be (1, 4 * A, H, W) format
# transpose to (1, H, W, 4 * A)
# reshape to (1 * H * W * A, 4) where rows are ordered by (h, w, a)
# in slowest to fastest order
bbox_deltas = bbox_deltas.transpose((0, 2, 3, 1)).reshape((-1, 4))
scores = all_scores[i:i+1, :]
# Same story for the scores:
#
# scores are (1, A, H, W) format
# transpose to (1, H, W, A)
# reshape to (1 * H * W * A, 1) where rows are ordered by (h, w, a)
scores = scores.transpose((0, 2, 3, 1)).reshape((-1, 1))
# Convert anchors into proposals via bbox transformations
proposals = bbox_transform_inv(anchors, bbox_deltas)
im_info = all_im_info[i]
# 2. clip predicted boxes to image
proposals = clip_boxes(proposals, im_info[:2])
# 3. remove predicted boxes with either height or width < threshold
# (NOTE: convert min_size to input image scale stored in im_info[2])
keep = _filter_boxes(proposals, min_size * im_info[2])
proposals = proposals[keep, :]
scores = scores[keep]
# 4. sort all (proposal, score) pairs by score from highest to lowest
# 5. take top pre_nms_topN (e.g. 6000)
order = scores.ravel().argsort()[::-1]
if pre_nms_topN > 0:
order = order[:pre_nms_topN]
proposals = proposals[order, :]
scores = scores[order]
# 6. apply nms (e.g. threshold = 0.7)
# 7. take after_nms_topN (e.g. 300)
# 8. return the top proposals (-> RoIs top)
keep = nms(np.hstack((proposals, scores)), nms_thresh)
if post_nms_topN_per_images > 0:
keep = keep[:post_nms_topN_per_images]
proposals = proposals[keep, :]
scores = scores[keep]
# Output rois blob
# Our RPN implementation only supports a single input image, so all
# batch inds are 0
batch_inds = np.ones((proposals.shape[0], 1), dtype=np.float32) * i
blob = np.hstack((batch_inds, proposals.astype(np.float32, copy=False)))
all_blobs = np.vstack((all_blobs, blob))
top[0].reshape(*(all_blobs.shape))
top[0].data[...] = all_blobs
# [Optional] output scores blob
# if len(top) > 1:
# top[1].reshape(*(scores.shape))
# top[1].data[...] = scores
def backward(self, top, propagate_down, bottom):
"""This layer does not propagate gradients."""
pass
def reshape(self, bottom, top):
"""Reshaping happens during the call to forward."""
pass
def _filter_boxes(boxes, min_size):
"""Remove all boxes with any side smaller than min_size."""
ws = boxes[:, 2] - boxes[:, 0] + 1
hs = boxes[:, 3] - boxes[:, 1] + 1
keep = np.where((ws >= min_size) & (hs >= min_size))[0]
return keep