ChinaOSC 2022 智能出行开源论坛技术论坛将于 2022 年 8 月 20 日 13:30-17:30 在陕西省西安高新国际会议中心召开。本论坛为从事自动驾驶和车路协同的同行提供一个了解国内外最新成果和交流探讨的场所。
ChinaOSC 2022 以“开源创新,引领未来”为主题,将汇聚国内外顶级开源专家和开源组织,为参会者呈上一场精彩宏大的专业盛宴。别缺席,等你来,欢迎参会报名!

【智能出行开源论坛】技术论坛
论坛背景介绍
随着汽车从单纯驾驶工具向大型移动智能终端的转换,车的核心部件由体现动力和操控的传动系统,进而转向体现自动驾驶技术的智能软件系统和处理器芯片。巨大的机遇下存在着严峻的挑战,主要体现在汽车软件的复杂性。自动驾驶技术的难度不再是单点突破,而是一个复杂的系统工程,需要大量人才在各个方面的努力。自动驾驶的基础技术都源于开源,开源生态建设将直接影响到汽车软件产业的发展。本论坛邀请了数位来自学术界和工业界的知名学者,每位嘉宾演讲30分钟,探讨智能出行的技术发展及开源对产学研的价值。本论坛为从事自动驾驶和车路协同的同行提供一个了解国内外最新成果和交流探讨的场所。
论坛主席:杨子江

西安交通大学 教授/交叉信息核心技术研究院可信人工智能创新中心主任/深信科创 CEO。曾任美国西密歇根大学计算机科学系正教授及密歇根大学电子工程与计算机科学系访问教授。学术兼职包括IEEE国际电动车与自动驾驶车技术委员会共同主席、开放群岛智能交通与运维开源工作组组长、2020 年 IEEE 国际自动驾驶软件会议主席、2019 年 IEEE 国际软件测试及验证大会共同主席、2019 年中国计算机协会龙星计划软件测试领域讲师、2018 年国际可靠软件工程会议程序委员会主席。研究领域为软件质量及安全保障。发表论文百余篇及十项美国专利,其中近 40 篇为 CCF A 类论文。获得 ACM SIGSOFT 杰出论文奖,ACM TODAES 最佳期刊论文奖,2022年在开放原子开源基金会创建智能出行工作组,目前的开源项目覆盖自动驾驶领域包括开源芯片、编程语言、操作系统、中间件、人工智能算法在内的全部基础软件。2019 年通过创办深信科创信息技术有限公司进行技术成果转化,该公司由图灵奖获得者姚期智院士孵化。
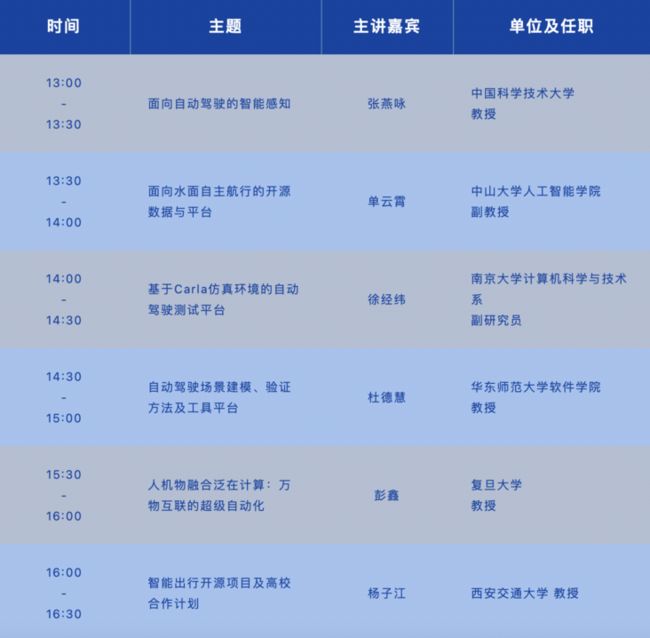
论坛日程安排
主题报告 1:
报告人姓名:
张燕咏

报告人简介:
中国科学技术大学计算机科学技术学院教授,副院长,ACM中国副主席,ACM理事会常务理事,国家科技创新2030“新一代人工智能”重大项目首席科学家,曾担任美国罗格斯大学助理教授、副教授、教授。获美国宾州州立大学博士,中国科学技术大学大学计算机本科。张燕咏教授一直从事智能物联网和智能感知等方面的研究。2017年获评IEEE Fellow。
报告题目:
面向自动驾驶的智能感知
报告摘要:
感知(perception)是无人驾驶系统的前端和瓶颈,其目标是利用摄像头、激光雷达、GPS等传感器,通过对其产生的数据进行学习实现对场景和车位姿的感知。 现今的无人驾驶系统面临数据爆炸、学习模型爆炸、场景爆炸以及车载算力不足等问题,导致很难实现精准、实时的感知。为了解决以上问题,我们提出基于多模态融合以及端边云协作的感知元模型。该元模型可以实现多种传感器的有效前融合,传感器数据与车载算力及边缘算力的动态适配,并实现跨场景的精准感知。
主题报告 2:
报告人姓名:
单云霄

报告人简介:
中山大学人工智能学院副教授,硕士研究生导师,中山大学计算机学院博士后,美国罗格斯大学-武汉大学联培博士。单云霄博士长期从事计算机视觉、机器人等领域,作为项目负责人,承担多项国家、省部级课题,其中国防科技创新特区项目 2 项,科技部重点研发计划骨干成员项目1项,广东省重点研发计划项目多项。申请人在计算机视觉、机器人等方向在 IEEE Transactions on Intelligent Transportation Systems、IEEE Transactions on Circuits and Systems for Video Technology 等国际著名期刊杂志发表学术论文 16 篇,其中 SCI 检索 6 篇(中科院2区以上论文3篇),EI 检索 14 篇(第一作者 4 篇),申请专利 10 件(授权 5 件)。
报告题目:
面向水面自主航行的开源数据与平台
报告摘要:
无人机、无人驾驶、无人船等先进的高智能系统的出现正在通过替代人类在恶劣的环境下作业变革人类的工作生活方式,尤其是海洋环境,恶劣的工作环境极大地限制了人类对海洋的探索,而无人船的出现正逐渐改变这一状况,在复杂海域执行任务的无人艇逐渐成为了学术和产业界的研究热点。然而,发展无人船面临较多困难,一方面,复杂的自主航行核心算法开发难度大,另一方面,如何验证开发的算法也是当前无人船技术发展面临的瓶颈问题。尽管通过实船测试可更真实的反映算法的能力,但与无人驾驶车辆和无人机不同,无人船的测试过程要更加的复杂,尤其是希望通过实船进行测试,测试的成本和难度极高。一种更高效的测试方法是通过无人船仿真平台,其可以保证多种在实船测试中难以构建的复杂场景成为可能。例如,复杂的海况条件下的大风、海浪、流等都可通过参数的设定生成。此外,通过设定静动态障碍物的轨迹可完成多种海上交互场景的验证。最后,仿真测试可通过动力学仿真软件模拟多种船舶运动模型和实际的航行动态,可验证算法对船舶模型的依赖程度以及其泛华能力。
主题报告 3:
报告人姓名:
徐经纬

报告人简介:
任南京大学计算机科学与技术系副研究员。研究领域为智能化软件 DevOps。近年重点探索包括智能化软件的质量保障、深度学习模型可解释性、以及自动驾驶仿真环境测试平台等研究,相关论文发表在软件工程领域 FSE、ICSE、ASE和JCST与机器学习和数据挖掘领域 KDD、IJCAI、TKDE 等国际期刊和会议中。担任 ICML、NeurIPS、KDD、WWW、SIGIR、AAAI 等国际会议程序委员会委员。
报告题目:
基于 Carla 仿真环境的自动驾驶测试平台
报告摘要:
随着硬件设备、系统软件以及人工智能的高速发展,带智能部件的复杂软件系统在面向人机物融合的场景计算中占有重要的地位。自动驾驶系统作为一种典型的智能化软件系统,若要实现 DevOps 的流程自动化和持续集成,必须配有高效的自动化测试过程。与传统软件相比,自动驾驶系统因其面对的环境和智能部件的非确定性,使其在 DevOps 开发过程中的测试环节存在诸多挑战。真实环境下的自动驾驶系统测试面临如测试代价高和过程不可控等诸多问题,而仿真环境的调测便捷以及高度可控等优势为自动驾驶系统的自动化测试提供了可能性。基于仿真环境的自动驾驶测试并非一蹴而就,需系统性的设计和构建测试平台。该报告从目前主流的仿真环境 Carla 着手,介绍了一种基于 Carla 的自动驾驶测试平台的架构和实现。该平台支持与目前开源自动驾驶系统 Apollo 的互联。该平台借助人工智能等手段,可针对待测目标高效生成富有多样性且带语义信息的测试场景。同时,平台还提供了一套闭环测试框架,从动态的带反馈控制的视角支撑自动驾驶系统视觉信息获取安全性的测试。
主题报告 4:
报告人姓名:
杨子江
报告人简介:
西安交通大学 教授/交叉信息核心技术研究院可信人工智能创新中心主任/深信科创 CEO。曾任美国西密歇根大学计算机科学系正教授及密歇根大学电子工程与计算机科学系访问教授。学术兼职包括 IEEE 国际电动车与自动驾驶车技术委员会共同主席、开放群岛智能交通与运维开源工作组组长、2020 年 IEEE 国际自动驾驶软件会议主席、2019 年 IEEE 国际软件测试及验证大会共同主席、2019年中国计算机协会龙星计划软件测试领域讲师、2018 年国际可靠软件工程会议程序委员会主席。研究领域为软件质量及安全保障。发表论文百余篇及十项美国专利,其中近 40 篇为 CCF A 类论文。获得 ACM SIGSOFT 杰出论文奖,ACM TODAES 最佳期刊论文奖,2022 年在开放原子开源基金会创建智能出行工作组,目前的开源项目覆盖自动驾驶领域包括开源芯片、编程语言、操作系统、中间件、人工智能算法在内的全部基础软件。 2019 年通过创办深信科创信息技术有限公司进行技术成果转化,该公司由图灵奖获得者姚期智院士孵化。
报告题目:
智能出行开源项目及高校合作计划
报告摘要:
元遨 OpenCarsmos 是在开放原子开源基金会下成立对智能出行项目群,旨在打造自动驾驶全栈基础软件。目前包括以下项目:
JUNO 吉光:自动驾驶及机器人应用开发工具和算法社区,基于云原生的声明式的低码开发平台和环境,提供微服务化的智能出行算法聚合库和参考架构;
DORA:自动驾驶及机器人分布式操作系统/中间件,下一代分布式操作系统/中间件框架,支持软件定义的车辆与机器人,用 Rust 语言开发,比 C/C++ 车规中间件更安全可靠可信;
ESSA,支持 Stateful Serverless Computing 框架,车路云协同的边缘计算服务和管理平台,弥补现有 Stateless Serverless Computing 的功能和业务局限,适用于复杂实时应用到云原生和云边协同计算改造;
Oasis 绿洲,自动驾驶模拟仿真测试平台,提供场景描述语言与测试规约表达,桥接真实世界与数字世界,适用于自动驾驶仿真验证与实地测试;
EDIT EV 爱迪特,开源智能电动汽车设计,下一代电动汽车开源架构模块化设计,可以插拔替换;
Hermes,面向汽车领域NPU计算芯片的 Chiplet D2D 互联接口标准,提供面向芯片模块化敏捷开发的 Chiplet 模式中的互联接口标准与 NPU 标准,满足多裸片短距高带宽低延时互联并对针对汽车领域做了车规级设计。
我们将解释这几个项目及探讨和高校对合作计划。
主题报告 5:
报告人姓名:
杜德慧

报告人简介:
华东师范大学软件学院,教授,博士生导师。中国计算机学会 CCF 软件工程、形式化方法专委委员、CCF 高级会员。主要研究领域为:可信人工智能、可信软件建模理论与方法,高安全 CPS 系统、ADS 系统。主持、参与国家级省部级项目十余项,在 ICSE、AAAI、ASE、美国 NASA 形式化方法、SCP、HSB 等期刊及会议发表论文百余篇,曾获FACS国际会议最佳论文奖。提出面向安全攸关 CPS 系统的可信软件建模与验证方法,成功应用于汽车自动驾驶等安全控制领域。
报告题目:
自动驾驶场景建模、验证方法及工具平台
报告摘要:
近年来,随着时空轨迹数据建模及应用研究的快速发展,时空轨迹数据应用于特定领域建模的研究引起人们的广泛关注.但由于时空轨迹数据所反映现实世界的多元性和复杂性以及时空轨迹数据的海量、异构、动态等特点,基于时空轨迹数据驱动的安全攸关场景建模的研究仍面临着挑战,包括统一的时空轨迹数据元模型、基于时空轨迹数据的元建模方法、基于数据分析技术的时空轨迹数据处理、质量评价等.针对汽车自动驾驶领域的场景建模需求,我们提出一种基于 MOF 元建模体系构建时空轨迹数据的元建模方法,根据时空轨迹数据的特征及自动驾驶的领域知识,构建了面向汽车自动驾驶的时空轨迹数据元模型;并基于此,提出基于时空轨迹数据元建模技术体系的自动驾驶安全场景建模方法,实现了基于场景建模语言 ADSML 实例化安全场景并构建了安全场景库,旨在为此类系统的安全关键场景建模提供一种可行的方案.此外,我们设计、开发了面向自动驾驶场景建模及验证的工具平台,支持以可视化的方式建模场景模型,并结合形式化验证技术,对场景模型的动态语义模型进行分析、验证。
2022 CCF 中国开源大会(CCF ChinaOSC)拟于 2022 年 8 月 20 日至 21 日在陕西省西安高新国际会议中心召开。大会由中国计算机学会(CCF)和开放原子开源基金会主办,CCF 开源发展委员会、西安电子科技大学承办,本届大会的主题为“开源创新,引领未来”。
作为第一届 CCF 中国开源大会,本届大会将组织特邀报告、开源高峰论坛、开源发展委员会路演、社区论坛、技术论坛、教育论坛、开源创新大赛培训等 20 余个不同类型的活动。大会将邀请 10 余位开源及相关领域中国科学院院士、中国工程院院士与知名专家,为大会带来特邀报告并参加开源高峰论坛等活动。目前已邀请参会的两院院士与知名嘉宾包括中国科学院院士梅宏,中国工程院院士廖湘科,中国科学院院士王怀民,中国工程院院士孙凝晖,中国科学院院士钱德沛,工信部科技司司长谢少锋,国家杰出自然科学基金获得者、清华大学教授胡事民等。本届大会预计将吸引参会单位超过 100 家,作为中国开源领域的年度盛会,诚挚地邀请开源领域学术界、企业界、教育界的学者、从业者、师生等前来参会