【计算机视觉】数字图像处理(三)—— 图像变换原理分析
数字图像处理(三)—— 图像变换原理分析
-
- 图像变换的目的与用途
-
- 1. 图像变换的目的
- 2. 图像正交变换的要求
-
- 正交变换的应用
- 一、傅里叶变换
-
- 1、傅里叶变换的理论基础与基本定义
- 2、连续函数的傅立叶变换
-
- 一维连续傅里叶变换及反变换
- 二维连续函数的傅立叶变换
- 3、离散函数的傅立叶变换
-
- 一维离散函数的傅立叶变换
- 二维离散函数的傅立叶变换
-
- 二维离散傅里叶变换的极坐标表示
- 二、傅里叶变换的性质
-
- 1. 可分离性
- 2. 周期性和共轭对称性
- 3. 平移性
- 4. 旋转性质
- 卷积与相关定理
-
- 卷积定理
- 相关定理
- 傅里叶变换的实例与应用
-
- (1)纯白的图像
- (2)黑白变化图像。
- (3)自然图像及其傅里叶变换
图像变换的目的与用途
1. 图像变换的目的
图像变换的目的主要有以下三点:
① 使图像处理问题简化;
② 有利于图像特征提取(我们知道特征提取的目的是为了对影像进行分析,根据特征从影像中提取目标等有用信息,特征提取对从影像中提取目标非常重要);
③ 有助于从概念或者物理上增强对图像信息的理解。
图像变换其实就是对图像的另外一种表达
正如我们可以将一个函数分解表示为奇偶函数、直流分量和交流分量、一系列不同系数的正交函数和等多种方式一样。图像变换通常采用的是一种二维正交变换。
2. 图像正交变换的要求
根据刚才提到的图像变换目的,对图像进行正交变换一般有如下三点要求:
① 正交变换必须是可逆的。因为变换域的特征表现形式与空间域不同,我们通常需要在变换域对图像处理后再将其变换到空间域进行表达显示,这样更符合我们目视习惯;
② 正变换和反变换的算法不能太复杂,计算量不能太大,否则就失去了简化图像处理的意义了。
③ 正交变换的特点是在变换域中图像能量将集中分布在低频率成分上,边缘等灰度变化明显区域反映在高频率成分上,从而有利于图像处理。
正交变换的应用
正交变换被广泛应用在 图像增强、图像恢复、特征提取、图像压缩编码和形状分析等方面,这些应用在我们后面的讲述中将有介绍。
这里我们主要讨论被广泛应用的傅立叶变换 ,它是将图像从空间域变换到频率的一种变换。
一、傅里叶变换
1、傅里叶变换的理论基础与基本定义
首先我们来认识一下傅里叶变换的理论基础,法国数学家、物理学家傅里叶在 1811 年任一函数都可以展成三角函数的无穷级数,由此引出的傅里叶级数展开中指出,任何周期函数都可以表示为不同频率的正弦和/或余弦和的形式,每个正弦和/或余弦乘以不同的系数(即傅里叶级数展开)。
在信号的傅立叶级数展开中,如果一个周期为 T 的函数 f(t)在 [-T/2,T/2] 上满足狄利克雷(Dirichlet) 条件,那么在[-T/2,T/2] 内可以将函数 f(t) 展开为无穷个正交三角函数的和,如下式所示:周期为大写 T 函数 f(t) 被展开表示成了无穷多个不同频率的三角函数的加权和, a n a_n an 和 b n b_n bn 即为权重系数。

![]()

其中,

每个 nw 就代表一个频率分量,不同的 n 代表不同的频率,Cn 为每个频率分量的系数,代表各频率分量的权重。可见,傅立叶级数清楚地表明了信号由哪些频率分量组成及其所占的比重,从而有利于对信号进行分析与处理。
通过上面的分析,可以将傅里叶变换形象地比作一个玻璃棱镜。棱镜是可以将光分解为不同颜色的物理仪器,每个成分的颜色由波长(或频率)来决定。傅里叶变换可以看作是数学上的棱镜,将函数基于频率分解为不同的成分。当我们考虑光时,讨论它的光谱或频率谱。同样, 傅立叶变换使我们能通过频率成分来分析一个函数。
2、连续函数的傅立叶变换
早期在没有进入数字化信号处理时代的时候,得到的信号都是连续信号,比如传感器检测到的声音、电流、电压等,因此,首先定义了连续信号的傅里叶变换。
图像作为一个特殊的二维空间信号,可以看做是一维信号的组合,因此,我们首先来认识一维傅里叶变换及其反变换。
一维连续傅里叶变换及反变换
令 f ( x ) f(x) f(x) 为实变量 x x x 的连续函数, f ( x ) f(x) f(x) 的傅立叶变换用 F ( u ) F(u) F(u)表示,则其定义式为
若已知 F ( u ) F(u) F(u) ,则傅立叶反变换为
上面两个正反变换公式称为傅立叶变换对
通常情况下,实际信号 f ( x ) f(x) f(x)是实函数,它的傅立叶变换 F ( u ) F(u) F(u)通常是复函数。因此, F ( u ) F(u) F(u) 可以表示成实部和虚部的形式或者振幅和相位的形式,以及通过 F ( u ) F(u) F(u)来表示信号的能量,同样根据欧拉公式
![]()
具体表示如下:

傅立叶变换中出现的变量 u u u 通常称为频率变量。
二维连续函数的傅立叶变换
一维傅立叶变换很容易推广到二维的情况。如果 f(x,y)是连续可积的,且 F ( u , v ) F(u,v) F(u,v) 是可积的,则二维傅立叶变换对为
二维函数的傅立叶变换的幅度、相位和能量谱分别为
3、离散函数的傅立叶变换
根据奈奎斯特抽样定理,前面介绍的图像的数字化可以知道,连续信号可以按等间隔抽样变为离散信号,这样就便于计算机处理。
这里我们用 f ( n ) f(n) f(n) 来表示一维连续信号离散化后的序列 f ( m , n ) f(m,n) f(m,n) 来表示二维连续信号的离散化。
一维离散函数的傅立叶变换
假设序列 f ( n ) f(n) f(n) 的长度为 N N N,则离散信号的傅立叶变换定义式为

式中 u = 0 , 1 , 2 , … , N ﹣ 1 u=0,1,2,…,N﹣1 u=0,1,2,…,N﹣1。反变换为
式中 u = 0 , 1 , 2 , … , N ﹣ 1 u=0,1,2,…,N﹣1 u=0,1,2,…,N﹣1
二维离散函数的傅立叶变换
在二维离散的情况下,比如大小为 M × N M×N M×N 的图像信号 f ( m , n ) f(m,n) f(m,n)的傅立叶变换对表示为

式中 u = 0 , 1 , 2 , … , M − 1 u=0,1,2,…,M-1 u=0,1,2,…,M−1; v = 0 , 1 , 2 , … , N − 1 v=0,1,2,…,N-1 v=0,1,2,…,N−1

式中 u = 0 , 1 , 2 , … , M − 1 u=0,1,2,…,M-1 u=0,1,2,…,M−1; v = 0 , 1 , 2 , … , N − 1 v=0,1,2,…,N-1 v=0,1,2,…,N−1
这里的 u 和 v 是频率变量,m 和 n 是空间变量
一般来说,对一幅图像进行傅立叶变换运算量很大,特别是对于大幅面的遥感影像,不直接利用以上公式计算,而是采用快速傅立叶变换算法(FFT,Fast Fourier Transform),快速傅里叶变换大大减少了计算量,通过软件编程或者专门的硬件来实现,这也正是傅里叶变换得到更广泛应用的原因之一。
二维离散傅里叶变换的极坐标表示
二维离散傅里叶变换的极坐标表示为:
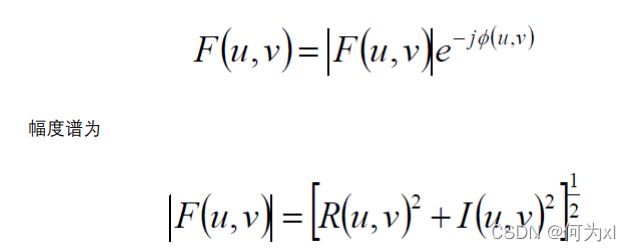
R(u,v)和 I(u,v)分别是 F(u,v)的实部和虚部
相位谱为

功率谱为


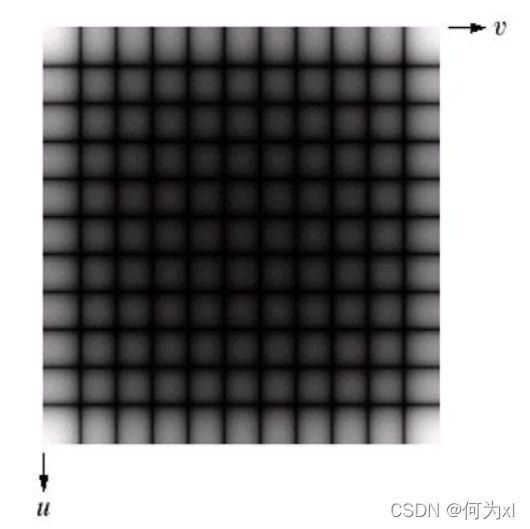
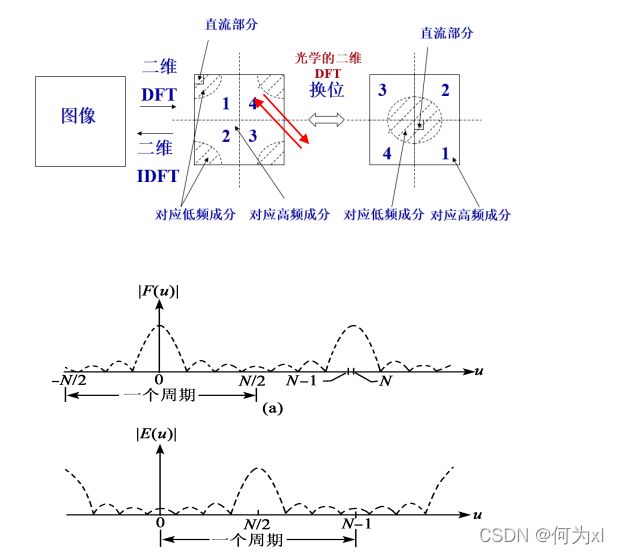
从二维傅里叶变换的定义式知道,一个 M 行 N 列的二维图像的傅里叶变换结果也是一个 M ∗ N M*N M∗N 大小的二维矩阵,与原空间域图像像素坐标对应,频率域图像的左上角坐标也为(0,0),该坐标处的值 F ( 0 , 0 ) F(0,0) F(0,0) 根据傅里叶变换的定义式可以得到,
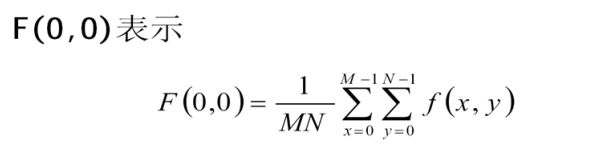

因此,傅里叶变换的原点值反映了图像的平均灰度,即平时信号理论中所说的直流分量
存储 DFT 结果的二维数组中频率成分的分布,如上图所示,即数组的左上角相当于直流部分,左上、右上、左下、右下各角的周围对应低频成分,数组中央部分附近对应
于高频成分。
离散傅立叶变换建立了函数在空间域与频率域之间的转换关系。在数字图像处理中,经常要利用这种转换关系及其转换规律(性质)对图像进行分析与处理
二、傅里叶变换的性质
这里主要介绍二维离散傅里叶变换(DFT,discrete FT)中的几个常用性质(可分离线、周期性和共轭对称性、平移性、旋转性质、卷积与相关定理):
1. 可分离性
二维离散傅立叶变换 DFT 可分离性的基本思想是二维 DFT 可分离为两次一维 DFT。
因此可以用通过计算两次一维的 FFT 来得到二维快速傅立叶变换 FFT 算法 。根据快速傅里叶变换的计算要求,需要图像的行列数均满足 2 的 n 次,如果不满足,在计算 FFT
之前先要对图像补零以满足 2 的 n 次。
一个 M 行 N 列的二维图像 f ( x , y ) f(x,y) f(x,y),先按行对列变量 y 做一次长度为 N 的一维离散傅里叶变换,再将计算结果按列向对变量 x 做一次长度为 M 傅里叶变换就可以得到该图像的傅里叶变换结果,如下式所示:

将上式分解开来就是如下两部分,首先得到 F ( x , v ) F(x,v) F(x,v) 再由 F ( x , v ) F(x,v) F(x,v) 得到 F ( u , v ) F(u,v) F(u,v):

u = 0 , 1 , 2 , … M − 1 u=0,1,2,…M-1 u=0,1,2,…M−1; v = 0 , 1 , 2 , . . . N − 1 v=0,1,2,...N-1 v=0,1,2,...N−1
计算过程如下图所示:
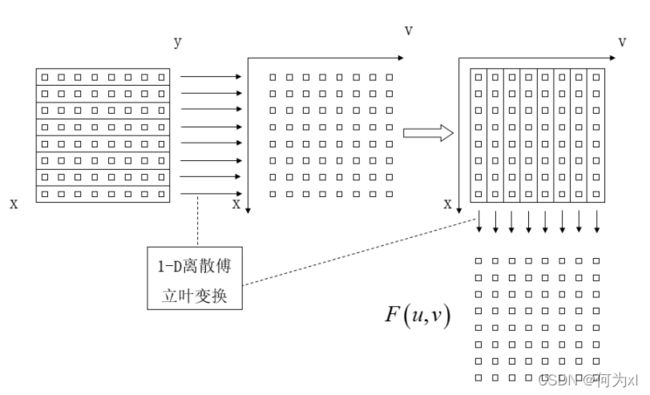
每一行有 N N N 个点,对每一行的一维 N N N 点序列进行离散傅里叶变换得到 F ( x , u ) F(x,u) F(x,u),再对得到 F ( x , u ) F(x,u) F(x,u) 按列向对每一列做 M 点的离散傅里叶变换,就可以得到二维图像 f ( x , y ) f(x,y) f(x,y) 的离散傅里叶变换 F ( u , v ) F(u,v) F(u,v)
同样,做傅里叶逆变换时,先对列向做一维傅里叶逆变换,再对行做一维逆傅里叶变换,
如下式所示:

x = 0 , 1 , 2 , … M − 1 x=0,1,2,…M-1 x=0,1,2,…M−1; y = 0 , 1 , 2 , . . . N − 1 y=0,1,2,...N-1 y=0,1,2,...N−1
2. 周期性和共轭对称性
由傅里叶变换的基本性质可以知道,离散信号的频谱具有周期性。离散傅立叶变换 DFT 和它的逆变换都是以傅里叶变换的点数 N 为周期的。
-
对于一维傅立叶变换有: F ( u ) = F ( u ± k N ) , k = 0 , 1 , 2 , ⋅ ⋅ ⋅ F(u)=F(u±kN), k=0,1,2,··· F(u)=F(u±kN),k=0,1,2,⋅⋅⋅
-
对于二维傅立叶变换有: F ( u , v ) = F ( u ± k N , v ± l N ) , k = 0 , 1 , 2 , ⋅ ⋅ ⋅ F(u,v)=F(u±kN,v±lN),k=0,1,2,··· F(u,v)=F(u±kN,v±lN),k=0,1,2,⋅⋅⋅ l = 0 , 1 , 2 , ⋅ ⋅ ⋅ l=0,1,2,··· l=0,1,2,⋅⋅⋅
类似有: f ( x ± k N , y ± l N ) = f ( x , y ) f(x±kN,y±lN)=f(x,y) f(x±kN,y±lN)=f(x,y),即从 DFT 的角度来看,反变换得到的图像阵列也是二维循环的。
共轭对称性,傅立叶变换结果是以原点为中心的共轭对称函数。
对于一维信号有: F ( u ) = F ∗ ( − u ) F(u)=F*(-u) F(u)=F∗(−u) ,如图下图所示的一维信号的幅度谱:点数为 M M M 的傅里叶变换一个周期为 M M M,关于原点对称,原点即为 0 频率点,从图中可以看出在 0 频率的值最大,即信号 f ( x ) f(x) f(x) 的直流分量(均值),远离原点处的即为高频成分,高频成分的幅值较小,说明信号的大部分能量集中在低频部分。
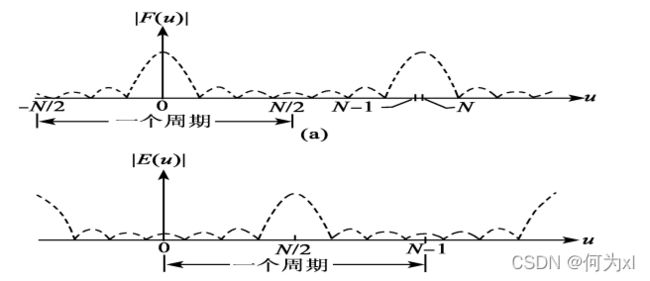
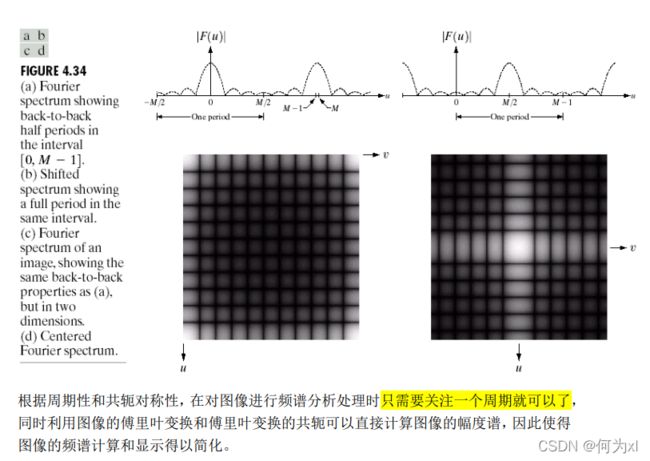
对于二维信号有: F ( u , v ) = F ∗ ( − u , − v ) F(u,v)=F*(-u,-v) F(u,v)=F∗(−u,−v) 对于二维图像,其结果如图下图所示。左上角 ( 0 , 0 ) (0,0) (0,0) 处为二维图像的 0 频率点,该点的值对应图像的灰度平均值,图中四个角对应低频成分,中间区域为高频成分,低频区域的幅度值大于高频区域的幅度值,也同样表面了该信号的主要能量集中在低频区域。这些结论在我们后面的介绍中会进一步得到证明。
3. 平移性
傅立叶变换对有如下平移性质:
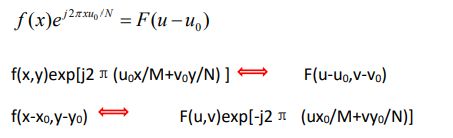
以上式子表明,在频域中原点平移到 ( u 0 , v 0 ) (u0 ,v0) (u0,v0)时,其对应的空间域 f ( x , y ) f(x,y) f(x,y) 要乘上一个正的
指数项:

在空域中图像原点平移到 ( x 0 , y 0 ) (x0,y0) (x0,y0)时,其对应的 F ( u , v ) F(u,v) F(u,v) 要乘上一个负的指数项:
![]()
在数字图像处理中,常常需要将 F ( u , v ) F(u,v) F(u,v) 的原点移到 N × N N×N N×N 频域的中心,以便能清楚地分析傅立叶谱的情况,平移前空域、频域原点均在左上方。要做到这点,只需令上面平移
公式中的 u 0 = v 0 = N / 2 u0=v0=N/2 u0=v0=N/2


上式表明:如果需要将图像傅立叶谱的原点从左上角 ( 0 , 0 ) (0,0) (0,0)移到中心点 ( N / 2 , N / 2 ) (N/2,N/2) (N/2,N/2),只要 f ( x , y ) f(x,y) f(x,y) 乘上 ( − 1 ) x + y (-1)^{x+y} (−1)x+y因子进行傅立叶变换即可实现。
平移性还告诉我们一个有趣的事实:当空域中 f ( x , y ) f(x,y) f(x,y) 产生移动时,在频域中只发生相移,并不影响它的傅立叶变换的幅值,因为

反之,当频域中 F ( u , v ) F(u,v) F(u,v) 产生移动时,相应的 f ( x , y ) f(x,y) f(x,y) 在空域中也只发生相移,而幅值不变。
根据该平移性质,为了更清楚查看二维图像的频谱,使直流成分出现在图像中央,在把画面分成四分的基础上,进行如图所示的换位(移位)也是可以的,这样,频域原点就会平移到中心。如下图所示
4. 旋转性质
如果 f ( x , y ) f(x,y) f(x,y) 旋转了一个角度,那么 f ( x , y ) f(x,y) f(x,y) 旋转后的图像的傅立叶变换也旋转了相同的角度。
平面直角坐标改写成极坐标形式:

替换则有:
如下图给出的例图所示,
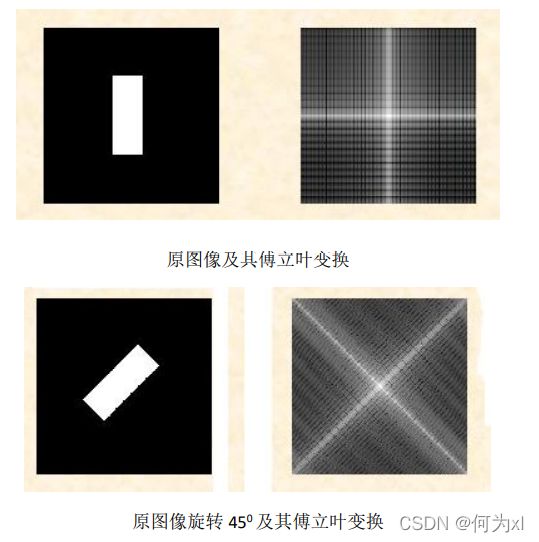
同时,我们可以得出结论,对图像进行旋转变换和傅立叶变换的顺序是可交换的。即先旋转再傅里叶变换或者先傅里叶变换再旋转,得到的结果相同。 F R f ( x , y ) = R F f ( x , y ) F{R{f(x,y)}} = R{F{f(x,y)}} FRf(x,y)=RFf(x,y)
卷积与相关定理
卷积定理
卷积定理包括空间域卷积和频率域卷积,卷积是空间域滤波和频率域滤波之间的纽带:
两个空域信号的卷积等价于其频域信号的乘积
该性质的优点是:
将需要经过翻折、平移、相乘、求和等步骤实现的复杂的卷积运算简化为简单的乘法运算,这也是快速傅里叶变换(FFT)的出现使得该性质得到更广泛应用,同时,该性质对于理解信号的频率域处理方法特别重要,使得信号的空间域处理可以转换到频率域进行处理实现。
根据空间域卷积定理,在空间域对应的是原始信号与滤波器的冲击响应的卷积,卷积定义式为信号翻折平移求和的过程,步骤复杂,运算量大,但如果转换到频率域进行处理,则对在将二者的频谱直接相乘就可以得到滤波结果,然后对滤波结果进行傅里叶逆变换就可以得到滤波后的空间域域图像。
如下图所示,对信号进行低通和高通滤波处理的过程和效果。

相关定理
空域中 f ( x , y ) f(x,y) f(x,y) 与 g ( x , y ) g(x,y) g(x,y) 的相关等价于频域中 F ( u , v ) F(u,v) F(u,v)的共轭与 G ( u , v ) G(u,v) G(u,v) 相乘 f ( x , y ) g ( x , y ) F ∗ ( u , v ) G ( u , v ) f(x,y) g(x,y) F*(u,v)G(u,v) f(x,y)g(x,y)F∗(u,v)G(u,v)
同时有:
f ∗ ( x , y ) g ( x , y ) F ( u , v ) G ( u , v ) f*(x,y)g(x,y) F(u,v) G(u,v) f∗(x,y)g(x,y)F(u,v)G(u,v)

相关定理与卷积定理类似,也是把积分求和过程转化为了频域相乘,因此,也使得相关分析的计算简化。
相关的重要应用在于匹配:确定是否有感兴趣的物体区域。 f ( x , y ) f(x,y) f(x,y) 是原始图像, g ( x , y ) g(x,y) g(x,y) 作为感兴趣的物体或区域(模板),如果匹配,两个函数的相关值会在 f f f 中找到相应 g g g 点的位置上达到最大值。如下图所示。图像 f ( x , y ) f(x,y) f(x,y) 与模板 g ( x , y ) g(x,y) g(x,y) ,通过计算相关函数,在匹配点处达到最大值,如图中红色圆圈标注的区域。
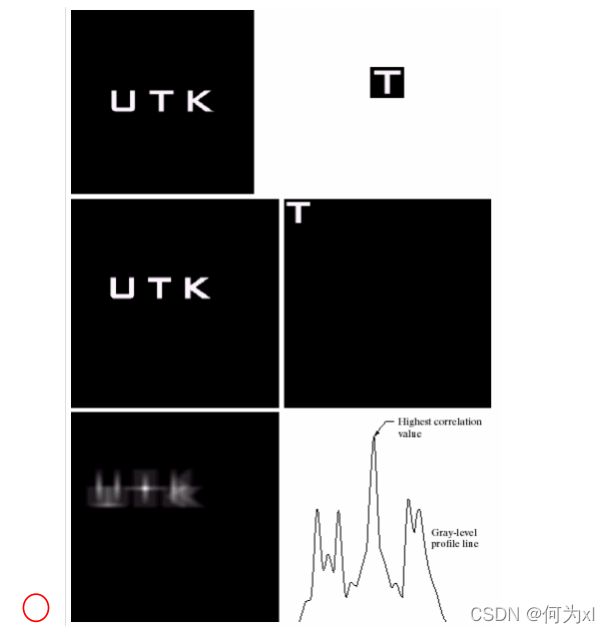
延拓图像 f ( x , y ) f(x,y) f(x,y),延拓图像 g ( x , y ) g(x,y) g(x,y)
相关函数图像,通过相关图像最大值的水平灰度剖面图
傅里叶变换的实例与应用
首先我们认识几点有关傅里叶变换的特点:
-
傅里叶变换是从将图像从空间域变换到频率域,具有明确的物理意义。图像的频率是表征图像中灰度变化剧烈程度的指标,是灰度在平面空间上的梯度,在噪声点和图像边缘处的频率为高频。
-
在频率域中,将信号表示为一系列正弦信号或者复指数函数的叠加,正弦信号的频率、幅值和相位可以描述正弦信号中的所有信息,由此可以得到信号的幅度谱和相位谱。在图像领域就是将图像灰度作为正弦变量。
-
傅里叶变换全局性的,是一个积分求和的过程,对时间、地点位置无法进行准 确定义,也就是说傅里叶变换得到的频谱图中的点无法与空间域中的某个空间位置对应,因此,从傅里叶变换图中并不能直接对应某个位置的特点。
-
傅里叶变换是一系列不同频率三角函数的和,每个频率分量的系数不同,这些系数代表了各频率成分的强弱或者所占比重,通过分析这些系数就可以分析图
像的特性。
下面我们通过一些实例来认识傅里叶变换在图像处理中的表现与应用
(1)纯白的图像
在整幅图像中没有像素值的变化,得到的频谱图如左图所示,在图像的中心有一个亮点,该亮点正好对应我们前面所讲的 F ( 0 , 0 ) F(0,0) F(0,0) 的幅度,其代表图像的平均灰度,也称为直流成分,该点值的大小反映了图像灰度平均值的大小。其余部分为黑色,即其它频率点的幅度值为 0,正体现了该图像在空间域中不同位置之间的灰度值没有变化,没有其它频率成分。图像中不同频率成分反映了图像灰度值变化的快慢。

(2)黑白变化图像。
观察下面四组图像可以发现,傅里叶变换的幅度谱的高值方向与空间域图像变换的方向垂直。傅里叶频谱图中的每一个像素点都代表一个频率值,幅值由像素点亮度编码而得。最中心的亮点是指直流分量,傅里叶谱图中越亮的点,对应于灰度图中对比越强烈(对比度越大)的点。由于每一列扫描线上没有变化,所以相应的傅里叶频谱图上行向量为 0, 每一行扫描线上有亮度差异,所以有频率幅值。




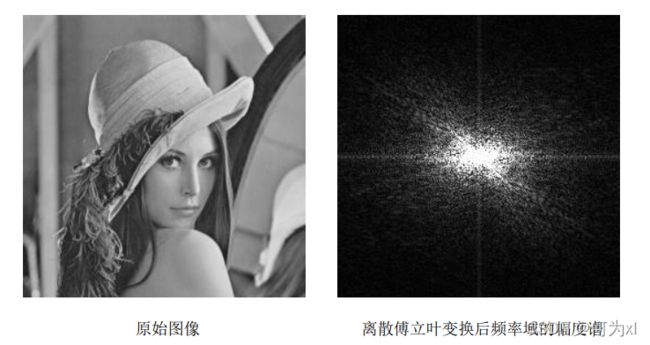
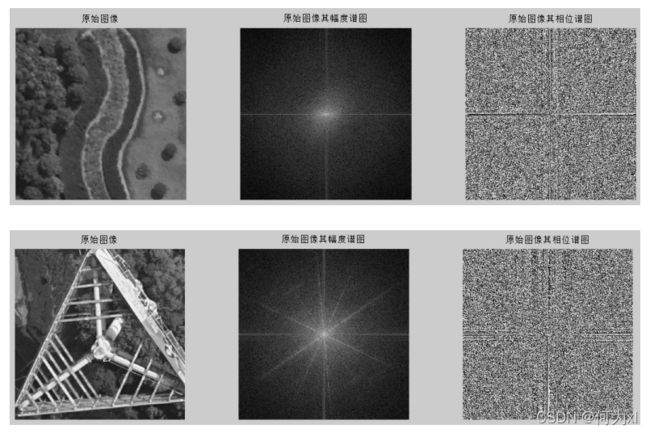
(3)自然图像及其傅里叶变换
低频处较亮,说明低频成分占大多数。当图像中存在比较明显的变化方向时,比如道路、建筑物等边缘,可以从频谱图中发现其隐含的方向,即前面第二组例子中的垂直关系。下面三组图中都有明显的条状地物,观察其频谱图可以发现空间域中几个明显的方向。根据这个特性,当图像中存在条带噪声时,可以通过频域分析,将条带噪声去除

(4)条带噪声去除。条带噪声是影像中具有一定周期性、方向性且呈条带状分布的一种特殊噪声。这种噪声是特别是遥感影像获取过程中,卫星传感器光电器件在反复扫描地物的成像过程中,受扫描探测元正反扫描响应差异、传感器机械运动和温度变化等影响造成的。以下图的 Lina 图像添加条带噪声为例,其频谱图如中间所示

影像中主要是大量的低频信息和少量的高频边缘、噪声等信息,反映在频谱图中就是在原点附近的低频成分强度比较大,而远离原点的高频成分强度逐渐减弱。条带噪声在影像中呈水平分布,其在频谱图中分布在原点的上下两侧。如图所示,垂直方向强度比较明显,并且亮点呈周期性分布,这就可能是条带噪声频谱分布。因此,只要我们滤除频谱图中垂直分布的亮点,然后对其做傅里叶逆变换就可以得到去除条带噪声的影像。
总结:为什么要在频率域研究图像处理
• 可以利用频率成分和图像外表之间的对应关系。一些在空间域表述困难的增强任务,在频率域中变得非常普通。
• 滤波在频率域更为直观,它可以解释空间域滤波的某些性质
• 可以在频率域指定滤波器,做反变换,然后在空间域使用结果滤波器作为空间
域滤波器的指导
• 一旦通过频率域试验选择了空间滤波,通常实施都在空间域进行