OpenCV图像处理----图片卷积
图片卷积
-
图像滤波是尽量保留图像细节特征的条件下对目标图像的噪声进行抑制,是图像预处理中不可缺少的操作,其处理效果的好坏将直接影响到后续图像处理和分析的有效性和可靠性。
-
线性滤波是图像处理最基本的方法,它允许我们对图像进行处理,产生很多不同的效果。首先,我们需要一个二维的滤波器矩阵(卷积核)和一个要处理的二维图像。然后,对于图像的每一个像素点,计算它的邻域像素和滤波器矩阵的对应元素的乘积,然后加起来,作为该像素位置的值。这样就完成了滤波过程。
-
对图像和滤波矩阵进行逐个元素相乘再求和的操作就相当于将一个二维的函数移动到另一个二维函数的所有位置,这个操作就叫卷积
卷积核定义规则:
- 滤波器的大小应该是奇数,这样它才有一个中心,例如3x3,5x5或者7x7。有中心了,也有了半径的称呼,例如5x5大小的核的半径就是2
- 滤波器矩阵所有的元素之和应该要等于1,这是为了保证滤波前后图像的亮度保持不变。当然了,这不是硬性要求了。
- 如果滤波器矩阵所有元素之和大于1,那么滤波后的图像就会比原图像更亮,反之,如果小于1,那么得到的图像就会变暗。如果和为0,图像不会变黑,但也会非常暗。
- 对于滤波后的结构,可能会出现负数或者大于255的数值。对这种情况,我们将他们直接截断到0和255之间即可。对于负数,也可以取绝对值。
均值滤波
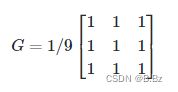
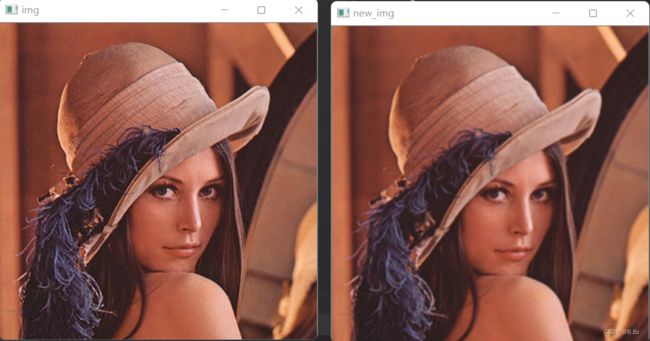
将卷积核内的所有灰度值加起来,然后计算出平均值,用这个平均值填充卷积核正中间的值,这样做可以降低图像的噪声,同时也会导致图像变得模糊
均值滤波API卷积核:
blur()方法参数:
- 图片矩阵
- 卷积核
import cv2
img = cv2.imread('img/itheima.jpg')
new_img = cv2.blur(img, (3, 3))
cv2.imshow('img', img)
cv2.imshow('new_img', new_img)
cv2.waitKey()
高斯模糊
- 使用均值滤波降噪发现图片模糊的很厉害,高斯模糊会保留像素点的真实值又能降噪。
- 高斯模糊是计算加权平均值,离中心点越近权值越高,离的越远,权值越低。
高斯函数API卷积核:
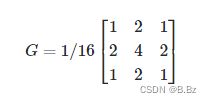
将卷积核内所有的灰度值与卷积核对应的值相乘然后加起来除以卷积核内所有的值的和计算出加权平均值替换卷积核中心对应的值。
GaussianBlur()函数参数:
- 图片矩阵
- 卷积核大小
- 高斯滤波的参数标准差,标准差越大去噪的强度越高、图片越模糊
import cv2
# 读取图片
img = cv2.imread('img/lena.jpg')
# 创建新窗口
cv2.namedWindow('gaussian', cv2.WINDOW_AUTOSIZE)
def updateSigma(val):
"""
回调函数 使用高斯滤波给图像去噪
:param val: 高斯滤波的参数标准差,标准差越大去噪的强度越高、图片越模糊
"""
# 高斯滤波函数
gaussian_blur = cv2.GaussianBlur(img, (5, 5), val)
# 展示
cv2.imshow('gaussian', gaussian_blur)
# 创建一个可拖动进度条 0~255的值 添加一个回调函数
cv2.createTrackbar('sigma', 'gaussian', 0, 255, updateSigma)
updateSigma(0)
cv2.waitKey()

中值滤波
-
对相邻的像素点进行灰度值的排序,然后取中间值,可以有效取出椒盐噪声
-
卷积区域内的像素值从小到大排序,取中间值替换卷积核中心区域的值
medianBlur()方法参数:
- 图片矩阵
- 孔径线性尺寸 必须大于1 而且必须为单数 3,5,7… 参数越大去噪强度越高图片越模糊
import cv2
img = cv2.imread('./img/itheima_salt.jpg')
# 使用中值滤波函数
new_img = cv2.medianBlur(img, 3)
cv2.imshow('img', img)
cv2.imshow('new_img', new_img)
cv2.waitKey()

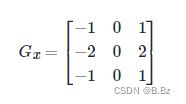
Sobel算子
- Sobel算子是像素图像边缘检测中最重要的算子之一
- 它是一个离散的一阶差分算子,用来计算图像亮度函数的一阶梯度之近似值。
- 在图像的任何一点使用此算子,将会产生该点对应的梯度矢量
水平梯度算子:
垂直梯度算子:

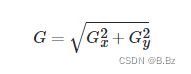
合成:
Sobel()方法参数:
- 图像矩阵
- 图像深度 如果为-1和原图一样
- 水平方向求导的阶数
- 垂直方向求导的阶数
import cv2
img = cv2.imread('img/brain.jpg', cv2.IMREAD_GRAYSCALE)
cv2.imshow('img', img)
# sobel算子水平梯度
x_sobel = cv2.Sobel(img, cv2.CV_32F, 1, 0)
# 图像转为8位int
x_sobel = cv2.convertScaleAbs(x_sobel)
cv2.imshow('x_sobel', x_sobel)
# sobel算子垂直梯度
y_sobel = cv2.Sobel(img, cv2.CV_16S, 0, 1)
y_sobel = cv2.convertScaleAbs(y_sobel)
cv2.imshow('y_sobel', y_sobel)
# 合成水平和垂直
x_y_sobel = cv2.addWeighted(x_sobel, 0.5, y_sobel, 0.5, 0)
cv2.imshow('x_y_sobel', x_y_sobel)
cv2.waitKey()
Sobel算子计算有时候会出现偏差,OpenCV提供了Sobel算子的进化版本!
Scharr()函数:
- 用法和Sobel()函数一样,Scharr()函数
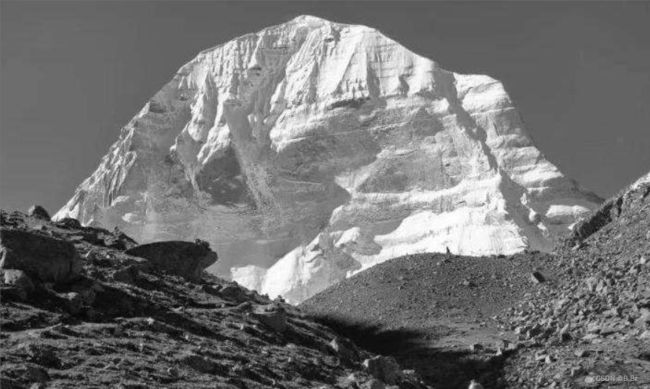
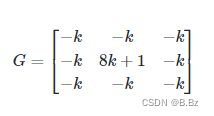
拉普拉斯算子
- 通过拉普拉斯变换后增强了图像中灰度突变处的对比度,使图像中小的细节部分得到增强,使图像的细节比原始图像更加清晰。
卷积核:

增强卷积核:

Laplacian()函数参数:
- 图片矩阵
- 图片深度
import cv2
# 以灰度方式读取图像
img = cv2.imread('img/grbq.jpg', cv2.IMREAD_GRAYSCALE)
cv2.imshow('img', img)
# 使用拉普拉斯算子
dst = cv2.Laplacian(img, cv2.CV_32F)
# 转换为8位int
dst = cv2.convertScaleAbs(dst)
cv2.imshow('dst', dst)
cv2.waitKey()

canny边缘检测算法
- Canny算法由John F.Canny于1986年开发,是很常用的边缘检测算法
- 是一种多阶算法,内部共有
4个阶段:噪声抑制(通过Gaussianblur高斯模糊降噪):使用5x5高斯滤波器去除图像中的噪声查找边缘的强度及方向(通过Sobel滤波器)应用非最大信号抑制(Non-maximum Suppression): 完成图像的全扫描以去除可能不构成边缘的任何不需要的像素高低阈值分离出二值图像(Hysteresis Thresholding)- 高低阈值比例为T2:T1 = 3:1 / 2:1
- T2为高阈值,T1为低阈值
Canny()函数参数:
- 图片矩阵
- 阈值1
- 阈值2
import cv2
img = cv2.imread('img/lena.jpg', cv2.IMREAD_GRAYSCALE)
cv2.imshow('img', img)
# 使用Canny边缘检测算法
dst_img = cv2.Canny(img, 50, 180)
cv2.imshow('dst_img', dst_img)
cv2.waitKey()

锐化滤波
- 图像锐化操作就是先找到物体边缘然后把边缘加到原来的图像内,这样就强化了物体边缘
卷积核:
import cv2
import numpy as np
img = cv2.imread("./img/hehua.jpg", cv2.IMREAD_COLOR)
cv2.imshow("src", img)
# 创建卷积核
kernel = np.array([
[-1, -1, -1],
[-1, 9, -1],
[-1, -1, -1]])
# 任意线性滤波器 把图像和卷积核进行卷积 参数2为卷积深度 -1和原图像一样
dst = cv2.filter2D(img, -1, kernel)
cv2.imshow("sharpness filter", dst)
cv2.waitKey(0)
cv2.destroyAllWindows()