条件随机场(CRF)极简原理与超详细代码解析
条件随机场(CRF)极简原理与超详细代码解析
- 1. 原理
-
- 1.1 从名称说起
- 1.2 优化的目标
- 1.3 如何计算
- 2. 代码
-
- 2.1 基本结构
- 2.2 模型初始化
- 2.3 BERT提取的特征如何输入给CRF
- 2.4 计算得分
-
- 2.4.1 CRF的输入与计算逻辑
- 2.4.2 计算真实得分
-
- 2.4.2.1 计算发射得分
- 2.4.2.2 计算转移得分
- 2.4.2.3 小结
- 2.4.3 计算全部路径得分
- 2.5 模型的训练
- 2.6 viterbi解码
- 结束
CRF是一个非常经典的图模型,网上关于CRF的详细介绍也很多,但本文不会针对原理做很多介绍和推导,我也不是很擅长这方面,而是从NLP应用的角度,以经典的LSTM-CRF或BERT-CRF等 序列标注模型为切入点,介绍CRF模型是怎样用pytorch实现的,以及在实现的过程中,CRF模型到底在做什么。
如果你符合以下情况之一,那么我认为此文适合你阅读:
- 刚接触NLP任务,对序列标注模型有大概的理解,但不是很熟练;
- 已经做NLP很久了,但是每次建模都是调包导模型,并不清楚模型是怎样运作的;
- 概率论学的不是很好,不想看公式;
- 看过很多关于CRF的介绍文章,当时懂了,回头又忘记CRF是怎么回事儿。
本文将以pytorch版本CRF的一个实现为例,尽可能详细地说明CRF是怎样实现的,对代码的解释几乎精细到每一行,相信你耐心读完本文,会从实践的角度对CRF的理解更加深刻。
1. 原理
尽管在使用CRF时,好像很简单,只需要实例化一个crf对象,然后把它拼接在特征抽取模型之后就可以了,但是说起CRF的原理,推导起来还比较复杂,多数介绍理论的文章会从图模型说起,讲到马尔可夫模型,最后再讲到CRF。但是本文是一篇偏向实践的介绍,在这里介绍原理,也只是为了更好地理解代码,所以我会说的非常简略。并且,我个人理解可能不是特别透彻,如果有讲的不准确的地方,还请路过的大佬们帮忙指正。
1.1 从名称说起
CRF全称Conditional Random Field,条件随机场,本质上是一个无向图模型,其中的“随机”,可以理解为图中的每个节点,都是一个随机变量。对于我们常提起的条件随机场模型,其实指的是狭义的线性条件随机场,我们有两组随机变量X和Y,其中Y是我们所关心的目标变量,X是可以直接获取到的观测变量。

同时也是马尔可夫随机场的一个特例,具备马尔可夫性。说起马尔可夫性,直观的理解就是,图上的每个节点的分布,只与它相邻的节点的分布有关。对于线性、有向的条件随机场来讲,也就是每一个目标变量 y i y_{i} yi,只会受到它的上一个变量 y i − 1 y_{i-1} yi−1的影响。
但真实世界中,这种假设,有点难以满足。刚才的假设,是只看目标变量Y的情况下,但实际情况下,Y会受到外界因素X的影响,例如,我们关心一个孩子10岁能长多高,除了需要知道他9岁的时候长了多高之外,我们还希望知道他吃的好不好,营养能不能跟得上。这也就是条件随机场中的“条件”,即CRF是对P(Y|X)进行建模的。
1.2 优化的目标
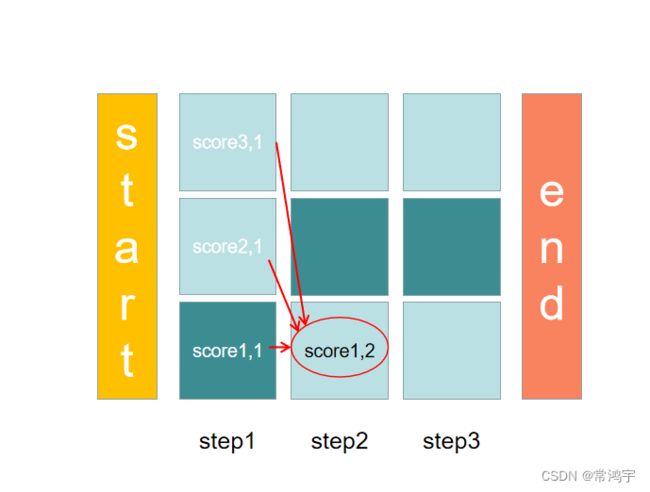
在序列标注任务中,CRF是一个链式的模型。假设我们有一个长度为seq_len的序列,我们希望把序列中的每一个token,预测它的类型,所以我们的目标可以看做是获取一个(seq_len, num_labels)的矩阵,进而可以把问题看做是一个找正确路径的问题。
假设有一个人,要从序列的开始位置走到序列的结束位置,对于每一个位置,都可以取num_labels个格子可以走,但是其中每次只有一个格子是正确的格子。那么最终可以组合出来的路径总数,一共有seq_len ** num_labels种,这其中,有一条路径,是正确的路径(也就是每个位置上的label全都预测正确),我们希望这个人,尽量能找到正确的那条路径(注意,我们关心的是尽量让每个位置的label都找正确,而不仅仅是最后的结束位置的label正确)。

假设深色的格子是每一步中正确的label,则途中红色的路径就是正确的路径。
假如每一条路径都有一个得分 p p p,第 k k k条路径的得分为 p = e s k p=e^{s_{k}} p=esk,我们的目标就是正确的那一条路径的得分 p r e a l p_{real} preal,越大越好,为了消除分数的量纲,我们的目标确定为:
P r o b = e p r e a l e p 1 + e p 2 + . . . + e s e q l e n ∗ n u m l a b e l s Prob = \frac{e^{p_{real}}}{e^{p_{1}}+e^{p_{2}}+...+e^{seqlen*numlabels}} Prob=ep1+ep2+...+eseqlen∗numlabelsepreal
在上图的例子中,总共有 3 3 = 27 3^{3}=27 33=27种路径,分母就一共有27项。
我们希望真实路径的得分越大越好,所以上式取负对数,就可以作为损失函数:
L o s s = − log P r o b = log ( e p 1 + e p 2 + . . . + e s e q l e n ∗ n u m l a b e l s ) − P r e a l Loss = -\log_{}{Prob}=\log{}{(e^{p_{1}}+e^{p_{2}}+...+e^{seqlen*numlabels})}-P_{real} Loss=−logProb=log(ep1+ep2+...+eseqlen∗numlabels)−Preal
对于每一条路径的得分,定义发射得分和转移得分,
- 发射得分 e m t , i em_{t, i} emt,i:第i个token的label的index是t的得分;
- 转移得分 t r t 1 , t 2 tr_{t_{1}, t_{2}} trt1,t2:上一个token,label index是 t 1 t_{1} t1,当前token的label index是 t 1 t_{1} t1的得分。
1.3 如何计算
从损失函数的构成可以看到,有两部分需要计算,一是真实路径的得分,二是达到该点的所有路径的总分。
其中真实路径的得分,我们可以直接根据真实的label,分别计算出发射得分和转移得分,然后将这两项相加即可。
而所有路径的得分之和 log ( e p 1 + e p 2 + . . . ) \log{}{(e^{p_{1}}+e^{p_{2}}+...)} log(ep1+ep2+...),如果计算每一条路径的得分,然后加起来的话,复杂度太高了,实际情况下,会采取动态规划的技巧。
假设用 P i , t P_{i, t} Pi,t表示 t t t时刻,label index为 i i i的logsumexp形式的所有路径的得分之和,那么我们想要求个多有路径得分的总和,就是 i i i取所有情况时的结果之和:
log ( e p 1 + e p 2 + . . . ) = P 1 , s e q l e n + P 2 , s e q l e n + . . . + P n u m l a b e l s , s e q l e n \log{}{(e^{p_{1}}+e^{p_{2}}+...)}=P_{1,seqlen}+P_{2,seqlen}+...+P_{numlabels, seqlen} log(ep1+ep2+...)=P1,seqlen+P2,seqlen+...+Pnumlabels,seqlen
我们在seq_len的维度上,也就是对时刻t,做动态规划:对于某个时刻 t t t,可以由上一个时刻 t − 1 t-1 t−1转移得到这个时刻的总分。
每一步的全部得分,都可以从它上一步的所有可能的得分转移得到,由此来实现状态转移。
具体而言,反应在公式上就是:
假如这个时刻的label index是1,它上一个时刻的label index 也是1,那么有:
P 1 , t − 1 → P 1 , t = P 1 , t − 1 + e m t , 1 + t r 1 , 1 P_{1, t-1}\to P_{1, t} = P_{1, t-1}+em_{t, 1}+tr_{1,1} P1,t−1→P1,t=P1,t−1+emt,1+tr1,1
同理,当它上一个时刻的label index是2时:
P 2 , t − 1 → P 1 , t = P 2 , t − 1 + e m t , 1 + t r 2 , 1 P_{2, t-1}\to P_{1, t} = P_{2, t-1}+em_{t, 1}+tr_{2,1} P2,t−1→P1,t=P2,t−1+emt,1+tr2,1
于是,上一个节点的label是对于num_labels(简写为 m m m)中的每一种情况,我们令:
Q 1 = P 1 , t − 1 + e m t , 1 + t r 1 , 1 Q_{1} = P_{1, t-1}+em_{t, 1}+tr_{1,1} Q1=P1,t−1+emt,1+tr1,1
可以从1写到 m m m(label的总数):
Q m = P m , t − 1 + e m t , 1 + t r m , 1 Q_{m} = P_{m, t-1}+em_{t, 1}+tr_{m,1} Qm=Pm,t−1+emt,1+trm,1
(从上式我们可以看到,num_labels这一维度,只影响到了上一个时刻的得分,以及转移得分,对发射得分没有影响。)
于是由 P i , t P_{i, t} Pi,t的定义可以得到,
P 1 , t = log ( e Q 1 + e Q 2 + . . . + e Q m ) (*) P_{1, t}=\log{}{(e^{Q_{1}}+e^{Q_{2}}+...+e^{Q_{m}})}\tag{*} P1,t=log(eQ1+eQ2+...+eQm)(*)
这是我们考虑 i = 1 i=1 i=1的情况时,那么对于时刻 t t t,一共有 m m m个label,同样的式子我们就可以写 m m m个。到这里,最终的解法也就呼之欲出了。
我们维护一个previous矩阵,它的每一行考虑了上一个状态的每一种情况时的得分,然后重复了 m m m行:
( P 1 , t − 1 , P 2 , t − 1 , . . . , P m , t − 1 . . . . . . . . . . . . P 1 , t − 1 , P 2 , t − 1 , . . . , P m , t − 1 ) \begin{pmatrix} P_{1, t-1}, & P_{2, t-1}, &..., &P_{m, t-1} \\ ... & ...& ...& ...\\ P_{1, t-1}, & P_{2, t-1}, &..., &P_{m, t-1} \end{pmatrix} ⎝ ⎛P1,t−1,...P1,t−1,P2,t−1,...P2,t−1,...,......,Pm,t−1...Pm,t−1⎠ ⎞
以及发射矩阵:
( e m t , 1 , e m t , 1 , . . . , e m t , 1 e m t , 2 , e m t , 2 , . . . , e m t , 2 . . . . . . . . . . . . e m t , m , e m t , m , . . . , e m t , m ) \begin{pmatrix} em_{t, 1}, & em_{t, 1}, &..., &em_{t, 1} \\ em_{t, 2}, & em_{t, 2}, &..., &em_{t, 2} \\ ... & ...& ...& ...\\ em_{t, m}, & em_{t, m}, &..., &em_{t, m} \end{pmatrix} ⎝ ⎛emt,1,emt,2,...emt,m,emt,1,emt,2,...emt,m,...,...,......,emt,1emt,2...emt,m⎠ ⎞
以及转移矩阵:
( t r 1 , 1 , t r 2 , 1 , . . . , t r m , 1 t r 1 , 2 , t r 2 , 2 , . . . , t r m , 2 . . . . . . . . . . . . t r 1 , m , t r 2 , m , . . . , t r m , m ) \begin{pmatrix} tr_{1, 1}, & tr_{2, 1}, &..., &tr_{m, 1} \\ tr_{1, 2}, & tr_{2, 2}, &..., &tr_{m, 2} \\ ... & ...& ...& ...\\ tr_{1, m}, & tr_{2, m}, &..., &tr_{m, m} \end{pmatrix} ⎝ ⎛tr1,1,tr1,2,...tr1,m,tr2,1,tr2,2,...tr2,m,...,...,......,trm,1trm,2...trm,m⎠ ⎞
现在把这三个矩阵的对应位置的元素相加,就得到了我们刚刚定义的 Q Q Q的矩阵,
( Q 1 , 1 , Q 1 , 2 , . . . , Q 1 , m . . . . . . . . . . . . Q m , 1 , Q m , 2 , . . . , Q m , m ) \begin{pmatrix} Q_{1, 1}, & Q_{1, 2}, &..., &Q_{1, m} \\ ... & ...& ...& ...\\ Q_{m, 1}, & Q_{m, 2}, &..., &Q_{m, m} \end{pmatrix} ⎝ ⎛Q1,1,...Qm,1,Q1,2,...Qm,2,...,......,Q1,m...Qm,m⎠ ⎞
由(*)式我们可以得到, Q Q Q矩阵的每一行,取logsumexp就是一个路径得分之和 P P P,第一行的logsumexp就是 P 1 , t P_{1, t} P1,t,以此类推。这样 m m m行都取logsumexp,然后转置,恰好就得到了
[ P 1 , t , P 2 , t , . . . , P m , t ] [P_{1, t}, P_{2, t},...,P_{m, t}] [P1,t,P2,t,...,Pm,t]
我们对这个东西求和,也就是我们要求的就是t时刻所有路径的得分之和(优化目标的分母)。
并且,把这个行复制 m m m份,拼起来的新的矩阵,刚好就是下一个时刻 t + 1 t+1 t+1对应的prev矩阵:
( P 1 , t , P 2 , t , . . . , P m , t . . . . . . . . . . . . P 1 , t , P 2 , t , . . . , P m , t ) \begin{pmatrix} P_{1, t}, & P_{2, t}, &..., &P_{m, t} \\ ... & ...& ...& ...\\ P_{1, t}, & P_{2, t}, &..., &P_{m, t} \end{pmatrix} ⎝ ⎛P1,t,...P1,t,P2,t,...P2,t,...,......,Pm,t...Pm,t⎠ ⎞
至此,某时刻的所有路径得分之和的动态规划解法,就介绍完了,如果有同学觉得这样讲的不是很详细,可以参考这篇推送。
2. 代码
crf的pytorch实现有很多很多版本,在之前的博客中,我们简单介绍了torchcrf中的代码,但是这篇博客不再沿用之前的那一版代码进行介绍,而是采用另一个版本(多看不同版本的代码有助于加深理解)。
这个版本的代码其实是一种mask的CRF,也就是说,对所有非法的路径进行了mask,例如,从B-PER到I-LOC的转移。下面的代码中会涉及到mask,所以提前说明一下。
这一版本的CRF实现,是从经典的信息抽取模型OneIE的开源代码中粘出来的,我不确定这个代码是来自其他开源项目,还是该项目原创,总之我们现在有这样一套代码,接下来让我们一步步弄清楚在这段代码里边发生了什么。
2.1 基本结构
首先我们从整体的角度看一下代码结构,可以分为三个部分:
- 初始化
- 计算得分
- viterbi解码
下面是代码基本结构:
class CRF(nn.Module):
def __init__(self, label_vocab, bioes=False):
super(CRF, self).__init__()
pass
def initialize(self):
"""初始化转移矩阵"""
pass
@staticmethod
def pad_logits(logits):
"""辅助padding方法"""
pass
# 以下5个方法用来在训练过程中计算得分
def calc_binary_score(self, labels, lens):
"""计算转移得分"""
pass
def calc_unary_score(self, logits, labels, lens)
"""计算发射得分"""
pass
def calc_gold_score(self, logits, labels, lens):
"""获取正确得分"""
pass
def calc_norm_score(self, logits, lens):
"""计算所有路径得分"""
pass
def loglik(self, logits, labels, lens):
"""计算损失"""
pass
# viterbi解码
def viterbi_decode(self, logits, lens):
pass
作为一个记录了节点状态的过程,CRF其实并不算复杂,我们需要注意的特征维度其实只有两个,标签数量m,以及状态节点的总数n,然后在实际使用中,通常还有一个batch size:
- batch_size: 训练的批次,下文的介绍中为了简单起见我们通常假设它为1;
- num_labels: 也就是标签数量m,序列每个位置上的label可能的取值,例如只有一个实体的BIO标注的情况下,m=3(B, I, O),如果是BIOES标注,则m=5;
- seq_len: 序列的长度n。
在正式开始之前,还是要唠叨一句,看代码的过程中一定要有维度的意识,这对我们理解代码是如何操作的非常重要,在下文中,我把所有的维度信息全都高亮了,以引起大家的注意。接下来我们将逐步拆解每一部分代码。
2.2 模型初始化
我们知道,在一个线性的CRF中,每一个节点的状态由它上一个节点的状态以及输入x计算获得:
- 对于BERT-CRF模型,输入x是由BERT编码得到的特征,相对CRF模型来讲可以看做是外部输入,所以在构建CRF模型本身时,我们并不需要在类中维护这样一个变量,只需要将它以数据流的形式参与计算即可。
- 而节点与节点之间的状态转移,则是CRF模型内部的,需要在训练的过程中对其进行维护,它的内容是每一个label到另一个label(包括其自身)的得分,所以我们需要维护一个尺寸为
[num_labels, num_labels]的一个矩阵。
模型的初始化部分包括了__init__和initialize。
需要注意的是,CRF的整个路径的长度,与待标注的序列的长度其实是不一样的,多了一个开始标记位和一个结束标记位,这就造成了转移矩阵的尺寸需要加2,所以准确地说,我们的状态转移矩阵的尺寸应该是[num_labels+2, num_labels+2],并且拿到bert编码输出之后,传入CRF之前,需要一个额外的padding操作,我们把padding的方法pad_logits也放在初始化这部分中讲。
具体的解释详见下面代码中的注解。
class CRF(nn.Module):
def __init__(self, label_vocab, bioes=False):
"""
:param label_vocab: Dict: 每个label对应的idx,例如{"O": 0, "B-PER": 1, ...}
:param bioes: bool: 是bioes形式的标注还是bio形式的标注,默认bio
整个初始化过程其实就是创建了一个状态转移矩阵transition
"""
super(CRF, self).__init__()
self.label_vocab = label_vocab
self.label_size = len(label_vocab) + 2 # 增加了和
self.bioes = bioes
self.start = self.label_size - 2 # 倒数第2个label是不可以向任何一个label转移
self.transition.data[self.start, :] = -100.0 # 没有任何一个label可以转移到不能跳过B直接转移到I和E
self.transition.data[label_idx, self.start] = -100.0
if label.startswith('B-') or label.startswith('I-'): # 不能由B或I转移得到(这是BIOES的规则)
self.transition.data[self.end, label_idx] = -100.0
for label_from, label_from_idx in self.label_vocab.items():
if label_from == 'O':
label_from_prefix, label_from_type = 'O', 'O'
else:
label_from_prefix, label_from_type = label_from.split('-', 1)
for label_to, label_to_idx in self.label_vocab.items():
if label_to == 'O':
label_to_prefix, label_to_type = 'O', 'O'
else:
label_to_prefix, label_to_type = label_to.split('-', 1)
if self.bioes:
# 1. 如果是BIOES形式,则
# 1) [O, E, S]中的任意一个状态,都可以转移到[O, B, S]中任意一个状态,不论前后两个状态的label是否相同
# - 例如,可以从E-PER转移到B-LOC
# 2) 当label相同时,允许B->I, B->E, I->I, I->E
is_allowed = any(
[
label_from_prefix in ['O', 'E', 'S']
and label_to_prefix in ['O', 'B', 'S'],
label_from_prefix in ['B', 'I']
and label_to_prefix in ['I', 'E']
and label_from_type == label_to_type
]
)
else:
# 2. 如果是BIO形式,则
# 1) 任何一个状态都可能转移到B和O
# 2) I状态只能由相同label的B或者I得到
is_allowed = any(
[
label_to_prefix in ['B', 'O'],
label_from_prefix in ['B', 'I']
and label_to_prefix == 'I'
and label_from_type == label_to_type
]
)
if not is_allowed:
self.transition.data[label_to_idx, label_from_idx] = -100.0
下面是padding的方法,其实就是给logits在第axis=2上添加了一个sos和一个eos,并且把序列的所有位置的sos和eos的概率全都设置为-100:
@staticmethod
def pad_logits(logits):
"""Pad the linear layer output with and scores.
:param logits: Linear layer output (no non-linear function).
"""
batch_size, seq_len, _ = logits.size() # (batch, seq_len, num_labels)
pads = logits.new_full((batch_size, seq_len, 2), -100.0,
requires_grad=False) # 返回一个形状为(batch, seq_len, 2)的tensor,所有位置填充为-100
logits = torch.cat([logits, pads], dim=2) # 拼接得到(batch, seq_len, num_labels+2)
return logits
经过上面的变化,我们就可以实现BERT输出的logits与CRF中转移矩阵的尺寸对应了。
2.3 BERT提取的特征如何输入给CRF
在展开计算得分的介绍之前,我们需要先搞明白,CRF与我们的特征提取模型(BERT编码器)是如何进行交互的。
假如我们有一个用transformers创建的BERT模型:
from transformers import BertModel, BertTokenizer
bert = BertModel.from_pretrained('bert-base-uncased')
tokenizer = BertTokenizer.from_pretrained('bert-base-uncased')
然后我们对输入进行tokenize之后,得到input_ids和attention_mask,然后把它们传给模型。
text = 'your text here.'
inputs = tokenizer(text)
bert_out = bert(inputs['input_ids'], attention_mask=inputs['attention_mask'])[0]
对这一块不熟悉的同学可以先去学一下transformers模块。
我们这里拿到的bert_out,是一个尺寸为(batch, seq_len, hidden)的tensor,
到这里还不够,细心的同学可能已经发现,在前文的维度介绍中,并没有bert的hidden_size这个尺寸,CRF关心的是每个token被分为每个label的概率,并不关心bert所定义的向量空间,所以需要用一个linear层把它干掉。
import torch.nn as nn
label_ffn = nn.Linear(bert_hidden_size, num_labels, bias=True)
label_scores = label_ffn(bert_out)
经过这样的一个线性变换,我们得到的label_scores,也就是输入给CRF的外部特征x序列,尺寸就变成了(batch, seq_len, num_labels)。
然而,我们刚刚也说了label_scores的尺寸中是num_labels,而CRF中需要的是num_labels+2,所以我们利用刚才的padding方法,进行转换:
crf = CRF(vocab) # 这里实例化一个CRF类,目的是利用它的padding方法
label_scores = crf.pad_logits(label_scores)
于是现在label_scores的尺寸变成了CRF所需要的(batch, seq_len, num_labels+2)。
万事俱备,只差CRF。
2.4 计算得分
2.4.1 CRF的输入与计算逻辑
终于到了CRF的核心部分。接着2.3节中的内容,我们看一下crf计算损失的总控函数是怎样的。在这一版的代码中,CRF.loglik就是这个总控方法,其调用时传入的参数如下:
label_loglik = crf.loglik(label_scores,
label_idxs,
token_nums)
- label_scores: 上文所述的每个位置上每个label得分,(batch, seq_len, num_labels+2);
- label_idxs: 每个位置上正确的label index,(batch, seq_len);
- token_nums: batch中每个序列的token数量,(batch).
为了更好地帮助读者理解,我们举一个例子:
假如我们有一个序列(简单起见不考虑[CLS], [SEP]和subword分词):
['Tom', 'went', 'to', 'New', 'York', '.']
我们的label是BIO的形式标注的两类实体,PER和LOC,那么所有label为:
['O', 'B-PER', 'I-PER', 'B-LOC', 'I-LOC']
以及label对应的vocab:
{'O': 0, 'B-PER': 1, 'I-PER': 2, 'B-LOC': 3, 'I-LOC': 4}
那么,我们需要输入CRF的label_scores就是一个(1, 6, 5)的tensor,
对应的label_idxs是一个(1, 6)的tensor,它应该是:
tensor([[1, 0, 0, 3, 4, 0]])
# PER, O, O, LOC, LOC, O
以及token_nums是一个(batch)的tensor,它应该是:
tensor([6])
至于它们三个分别是干什么用的,到了具体的计算中自然就清楚了。
说回我们的总控方法:
def loglik(self, logits, labels, lens):
norm_score = self.calc_norm_score(logits, lens) # 全部路径的得分总和
gold_score = self.calc_gold_score(logits, labels, lens) # 由正确的label计算出来的得分
return gold_score - norm_score
这一部分就很清楚地写出了CRF的训练目标,
L o s s = − log P r o b = log ( e p 1 + e p 2 + . . . + e s e q l e n ∗ n u m l a b e l s ) − P r e a l Loss = -\log_{}{Prob}=\log{}{(e^{p_{1}}+e^{p_{2}}+...+e^{seqlen*numlabels})}-P_{real} Loss=−logProb=log(ep1+ep2+...+eseqlen∗numlabels)−Preal
但是这个loglik中跟损失函数实际上是反着的,所以在优化这个损失的时候,记得给它取负号。
2.4.2 计算真实得分
在loglik中我们看到,CRF的训练目标,是gold_score与norm_score之间的差值,我们希望这两部分尽量接近,也就是真实路径的得分所占全部路径得分之和的比值尽可能大。
那么gold_score,也就是真实得分,是怎么来的呢,它由发射得分和转移得分两部分构成:
def calc_gold_score(self, logits, labels, lens):
"""计算真实得分"""
unary_score = self.calc_unary_score(logits, labels, lens).sum(1).squeeze(-1)
binary_score = self.calc_binary_score(labels, lens).sum(1).squeeze(-1)
return unary_score + binary_score
接下来的2.4.2.1和2.4.2.2两节中,将详细介绍发射得分和转移得分是怎么来的。
2.4.2.1 计算发射得分
发射得分,是由外部输入x得到的,有些人也习惯称其为Unigram得分,因为只考虑了x这一项(与此同时,转移得分也称作Bigram,因为同时考虑了yi和yi-1)。
发射得分的代码是这样写的:
def calc_unary_score(self, logits, labels, lens):
"""
计算发射得分
logits: (batch, seq_len, num_labels+2)
labels: (batch, seq_len)
lens: (batch)
"""
labels_exp = labels.unsqueeze(-1)
scores = torch.gather(logits, 2, labels_exp).squeeze(-1)
mask = sequence_mask(lens).float()
scores = scores * mask
return scores
可以看到它把三项输入全都用上了。
这个方法的核心就是一个torch.gather(),具体而言,就是对根据一个idx tensor,对目标tensor取值,然后再拼接再一起。
- 其中第一个参数
logits,是目标tensor,也就是说,gather返回的值,是从这个tensor中取出来的; - 第二个参数2,意思是在哪一个维度上进行操作,我们知道logits有0, 1, 2三个维度,这里的2意思就是在维度2,也就是num_labels+2的那个维度上进行操作;
- 第三个参数label_exp,是告诉gather方法,在取值的时候怎么取。
由于torch.gather要求idx tensor和目标tensor的维度是一样的,而labels相比logits少了一个维度,所以我们需要先对它unsqueeze出一个维度。
简便起见,我们忽略batch维度,假设输入的logits是这样的:
# logits: (seq_len, num_labels+2)
tensor([[-3.5, 7.1, 6.9, -5.4, 2.0, -8.7, -1.9],
[15.7, -4.2, 6.6, -5.3, -11.9, -2.2, 2.3],
...])
假设输入的label,在忽略batch,并且unsqueeze之后,是这样的:
# labels: (seq_len, 1)
tensor([[1],
[0],
...,])
那么gather之后的结果就是这样的(同样是忽略batch):
# scores: (seq_len, 1)
tensor([[7.1],
[15.7],
...])
也就是logits中的第0行,根据label的第0行,取了第1个元素,logits的第1行,根据label的第1行取了第0个元素,……,然后再把取完之后的结果拼起来,具有形状(batch, seq_len, 1),最后在squeeze掉最后一个维度,就是我们需要的scores了,形状是(batch, seq_len)。
然后要进行mask,这个sequence_mask是一个辅助函数,定义如下:
def sequence_mask(lens, max_len=None):
"""Generate a sequence mask tensor from sequence lengths, used by CRF."""
batch_size = lens.size(0)
if max_len is None:
max_len = lens.max().item()
ranges = torch.arange(0, max_len, device=lens.device).long()
ranges = ranges.unsqueeze(0).expand(batch_size, max_len)
lens_exp = lens.unsqueeze(1).expand_as(ranges)
mask = ranges < lens_exp
return mask
这个方法很简单,就是根据一个batch生成一个mask tensor,举个例子,如果你的batch_size=4,序列的长度分别为3,5,2,6,那么生成的mask矩阵就是一个形状为(batch, max_seq_len)的tensor:
tensor([[True, True, True, False, False, False],
[True, True, True, True, True, Flase],
[True, True, False, False, False, False],
[True, True, True, True, True, True]])
将mask作用在scores上,就实现了对scores的padding部分(注意这里说的padding是序列长度方向上的padding,不是上文padding函数的num_labels方向上的padding,因为到这里num_labels这个维度已经被gather掉了)的mask。
以上就是ugram特征(发射得分)的计算过程,最终我们得到的scores是形状是(batch, seq_len),还是比较容易理解的。
趁热打铁,我们来直观地理解一下这个发射得分是什么东西。回顾一下这个计算过程,首先我们利用BERT编码器,获取到了batch中每个instance的token的特征((batch, seq_len, hidden)),然后我们利用一个Linear层,将每个token上的特征,转化成了在label空间上的logits((batch, seq_len, num_labels+2)),这一步的结果,可以理解为,每个token属于某一类label的“概率”。
我们知道,CRF是一个判别模型,所以直观地理解,我们希望这个模型“更准确”,那么就是希望对于某一个token,能够以更大的“概率”,将其判断为正确的label,所以自然地,在我们知道label的情况下,把所有正确label位置上的得分都取出来,就是整个序列的发射得分,我们希望它尽可能大。
(TODO: 类别加权算分)
2.4.2.2 计算转移得分
如2.2节中所述,转移得分的计算与发射得分不同,是需要用到CRF类的transition矩阵的(刚刚的calc_unary_score放到CRF类里,在pycharm中会有黄色的波浪线,因为它是静态方法)。
需要注意的是,既然是状态转移“矩阵”,那就是涉及到两个方向的,所以num_labels维度和seq_len维度在这一部分中都需要注意。
为了方便说明转移得分的计算过程,我们还是以之前的例子,两类实体BIO格式标注,共有5个label,那么,加上sos和eos两个额外的label,一共就是7个label,其中每个label对应的idx如下:
- ‘O’: 0
- ‘B-PER’: 1
- ‘I-PER’: 2
- ‘B-LOC’: 3
- ‘I-LOC’: 4
- ‘sos’: 5
- ‘eos’: 6
为了与前文保持统一,仍然称真实的label数量为num_labels(5),添加了开始和结束位的数量为num_labels+2(7)。
这一部分可能有点绕,但是别慌,跟着下面的思路走,理解应该不成问题。先把注解版的代码贴在下面,然后我们一段一段的讲这部分代码。
def calc_binary_score(self, labels, lens):
"""
计算转移得分
:param labels: (batch, seq_len)
:param lens: (batch)
:return:
"""
batch_size, seq_len = labels.size()
# 1. 扩展label:其实就是对labels在seq_len的维度上扩展了一个开头和末尾
# A tensor of size batch_size * (seq_len + 2)
labels_ext = labels.new_empty((batch_size, seq_len + 2)) # 生成一个(batch_size, seq_len + 2)没有初始化的tensor
labels_ext[:, 0] = self.start # batch中每个instance的第1个位置的值变成start(label_size -2)
labels_ext[:, 1:-1] = labels
mask = sequence_mask(lens + 1, max_len=(seq_len + 2)).long() # 开头start位置为True,后边true部分每一位向后移动一位
pad_stop = labels.new_full((1,), self.end, requires_grad=False) # (batch), 以eos生成一个tensor([6,...,6])
pad_stop = pad_stop.unsqueeze(-1).expand(batch_size, seq_len + 2) # (batch) -> (batch, seq_len+2)
labels_ext = (1 - mask) * pad_stop + mask * labels_ext # 被mask的部分变成6,剩下的部分是正确的label
labels = labels_ext
# 2. 扩展transition:复制了batch份,另batch中的每个instance都有一个transition矩阵
trn = self.transition # 注意,self.transition的行是from_label, 列是to_label
trn_exp = trn.unsqueeze(0).expand(batch_size, self.label_size,
self.label_size)
# 接下来两部分是重点,计算了从一个label转移到另一个label的得分
# 3. to_label的得分计算
lbl_r = labels[:, 1:] # 在原始的seq_len上去掉了第一个token
lbl_rexp = lbl_r.unsqueeze(-1).expand(*lbl_r.size(), self.label_size) # (batch, seq_len+1) -> (batch, seq_len+1, num_labels)
# score of jumping to a tag
# 取trn_exp的lbl_rexp中对应的一行(也就是取真实label对应的转移),然后拼起来
# (batch, num_labels+2, num_labels+2) -> (batch, seq_len-1, num_labels+2)
trn_row = torch.gather(trn_exp, 1, lbl_rexp) # 这个就是每一个token上,由某个label转移到当前label的得分
# 4. from_label的得分计算
lbl_lexp = labels[:, :-1].unsqueeze(-1) # (batch, seq_len+1, 1) 每个位置是从哪个label转移来的
trn_scr = torch.gather(trn_row, 2, lbl_lexp) # (batch, seq_len+1, 1) from_label到to_label的真实得分
trn_scr = trn_scr.squeeze(-1) # (batch, seq_len+1, 1) -> (batch, seq_len-1)
# 5. mask掉seq_len维度上的start,注意不是mask掉num_labels上的start
mask = sequence_mask(lens + 1).float()
trn_scr = trn_scr * mask
score = trn_scr
return score
我们把这部分代码拆解成五个部分,
§ 第一部分
第一部分是将labels做了一个扩展,看似很简单,但是第一眼看过去可能有点疑惑,这么做的目的是什么,
其实是为这个函数的核心思想——错位——做准备。
# 1. 扩展label:其实就是对labels在seq_len的维度上扩展了一个开头和末尾
# A tensor of size batch_size * (seq_len + 2)
labels_ext = labels.new_empty((batch_size, seq_len + 2)) # 生成一个(batch_size, seq_len + 2)没有初始化的tensor
labels_ext[:, 0] = self.start # batch中每个instance的第1个位置的值变成start(label_size -2)
labels_ext[:, 1:-1] = labels
mask = sequence_mask(lens + 1, max_len=(seq_len + 2)).long() # 开头start位置为True,后边true部分每一位向后移动一位
pad_stop = labels.new_full((1,), self.end, requires_grad=False) # (batch), 以eos生成一个tensor([6,...,6])
pad_stop = pad_stop.unsqueeze(-1).expand(batch_size, seq_len + 2) # (batch) -> (batch, seq_len+2)
labels_ext = (1 - mask) * pad_stop + mask * labels_ext # 被mask的部分变成eos的idx,剩下的部分是正确的label
labels = labels_ext
这几行其实就是在seq_len的维度上加了2,从形状为(batch, seq_len)的labels,生成了一个扩展的形状为(batch, seq_len+2)的label_ext。
细心的同学可能发现了,之前我们+2,增加的sos和eos位置,那不是在num_labels的维度上加的吗,意思是标记状态转移的开始和结束,现在怎么又加在seq_len维度上了,这不就乱了吗?其实这两者正好是对应的,也就是我们在开始之前有一个虚拟的开始位置,它的label是sos,结束之后有一个结束位置,label是eos。
说回错位的思想:
由CRF的(条件)马尔可夫性可知,某一个时刻的状态,除了受外界条件(输入x,也就是发射得分的部分)影响之外,只受它的前一时刻的状态影响,所以理论上我们需要两个label序列,一个from序列,和一个to序列。但是对于label来讲,两个序列其实是共享的,他们之间只差了一个时间步(也就是在seq_len维度上),所以我们没有必要做两条label序列出来,而是给它做长一点就可以了:
生成一个label_ext,使得取[:, 1:]时,获取的是to序列的label,取[:, :-1]时,获取的是from序列的label。
具体是怎么操作的呢,还是假设batch_size是1,假如我们的label原本是这个样子:
[[1, 0, 0, 3, 4, 0]]
# [[B-PER, O, O, B-LOC, I-LOC, O]]
经过前三行之后,就变成了:
[[5, 1, 0, 0, 3, 4, 0, ?]]
# [[sos, B-PER, O, O, B-LOC, I-LOC, O, empty]]
然后生成了一个mask,mask跟之前的mask相比,其实就是对batch中的每一个instance,在第一个1之前又加了一个1。于是我们有mask:
[[1., 1., 1., 1., 1., 1., 1., 0.]]
再然后,以eos(idx=6)做了一个用来pad_stop,形状为(batch, seq_len+2),其中的内容全都是eos对应的idx,也就是6.,然后把这个结合mask作用在label_ext上,也就是所有被mask的位置的label,变成eos的idx,其余位置保留。
折腾了一大圈下来,我们的label_ext也就变成了:
[[5, 1, 0, 0, 3, 4, 0, 6]]
假如我们的batch_size不是1,还有另外一句话,“Tom is cool.”,那生成的label_ext,可能是这个样子:
[[5, 1, 0, 0, 3, 4, 0, 6],
[5, 1, 0, 0, 0, 6, 6, 6]]
§ 第二部分
第二部分是扩展转移矩阵transition
# 2. 扩展transition:复制了batch份,另batch中的每个instance都有一个transition矩阵
trn = self.transition # 注意,self.transition的行是from_label, 列是to_label
trn_exp = trn.unsqueeze(0).expand(batch_size, self.label_size, # 这里的self.label_size就是一直强调的num_labels+2
self.label_size)
这部分很容易理解,就是在batch维度上复制,相当于给了batch中的每一个instance都有一个转移矩阵,扩展之后的trn_exp的形状为(batch, num_labels+2, num_labels+2)。
需要注意的是,self.transition的两个num_labels+2的维度,是to在前,from在后,如果这里没有注意到,后边的代码可能就优点困惑了。详见2.2节中的初始化部分。
§ 第三部分
第三部分计算是to label,得到的是:
“假如我们知道当前位置的label,从上一个位置的每一个label转移过来的得分”
可能比较拗口,下面根据代码解释一下:
# 3. to_label的得分计算
lbl_r = labels[:, 1:] # 在原始的seq_len上去掉了第一个token
lbl_rexp = lbl_r.unsqueeze(-1).expand(*lbl_r.size(), self.label_size) # (batch, seq_len+1) -> (batch, seq_len+1, num_labels)
# score of jumping to a tag
# 取trn_exp的lbl_rexp中对应的一行(也就是取真实label对应的转移),然后拼起来
# (batch, num_labels+2, num_labels+2) -> (batch, seq_len+1, num_labels+2)
trn_row = torch.gather(trn_exp, 1, lbl_rexp) # 这个就是每一个token上,由某个label转移到当前label的得分
代码第一行:如第一部分中所述,我们对labels取[:, 1:]时,获取的是to序列的label
代码第二行:扩展出一个维度,(batch, seq_len+2-1) 扩展为 (batch, seq_len+2-1, num_labels)
代码第三行:以to label(每个位置上的真实label)为标准,在转移矩阵的维度1(num_labels+2的维度上),取相应的行拼在一起,得到一个形状为(batch, seq_len+1, num_labels+2)的tensor trn_row。
具体的,在不考虑batch的情况下,假如我们在第二部分中扩展trn_ext是这个样子(实际不会是这样样子,这样写为了方便理解gather):
tensor([[0, 0, 0, 0, 0, 0, -100],
[1, 1, 1, 1, 1, 1, -100],
[2, 2, 2, 2, 2, 2, -100],
...,])
gather之后的trn_row就是分别取了to label对应的每一行,然后再拼起来,也就是:
tensor([[5, 5, 5, 5, 5, 5, -100],
[1, 1, 1, 1, 1, 1, -100],
[0, 0, 0, 0, 0, 0, -100],
...])
再强调一遍,trn_row中的每一行,不会是像 [1, 1, 1, 1, 1, 1, -100],它的实际意义是,每一个token(列的方向上),由上一个token的每一种可能的label(行的方向上),转移到当前label的得分。也就是说,这一步的计算,固定了to label,而没有固定from label。
每一行中,指的是上一个token的label,而不是当前这个token的label。所以我们看到,任意一行,最后一个元素一定是-100,因为不可能出现“上一个token是eos”的状况。
§ 第四部分
第四部分计算的是from label
得到的是:当上一个token的label是 l a b e l i label_{i} labeli时,转移到当前token的label是 l a b e l j label_{j} labelj的得分。
理解了第三部分之后,第四部分就相对容易理解了。刚才说了,第三部分中只确定了当前token的label,而上一个token的label是任意的,第四部分就是把上一个token的label也确定下来,这样就得到了在当前的转移矩阵下,真实情况下的从labeli转移到labelj的转移得分。
# 4. from_label的得分计算
lbl_lexp = labels[:, :-1].unsqueeze(-1) # (batch, seq_len+1, 1) 每个位置是从哪个label转移来的
trn_scr = torch.gather(trn_row, 2, lbl_lexp) # (batch, seq_len+1, 1) from_label到to_label的真实得分
trn_scr = trn_scr.squeeze(-1) # (batch, seq_len+1, 1) -> (batch, seq_len-1)
第一行代码:取label的左移部分,模拟的是上一个token的label;
第二行代码:简单解释一下,就是在我们刚刚得到的trn_row中的每一行,根据真实的label,取对应的列,然后重新组合,得到真实的分值;
第三行代码:删除多余的num_labels+2维度。
至此,我们就成功取到了转移得分。
§ 第五部分
最后把多余的虚拟的start位置的得分给mask掉。这部分就不展开介绍了。
2.4.2.3 小结
全部讲完之后,还是定性的来理解一下转移得分,其实就是每个token上,我们不考虑这个token的词是谁,有什么特征,我们只关心它的上一个token的label是什么,以此来判断当前这个词的label,说白了,就像是“找规律”一样,类似于一种先验知识,我们通过学习一个transition矩阵,知道了某个label它的下一个label更有可能是谁,BERT-CRF模型,也正是因为在BERT编码器学到的特征之外,额外考虑了这部分“先验”的知识,才使得效果能够有所提升。
在发射分和转移分的计算上,最终都是落在了某个token的得分上,但是我们想要的,是整个序列整体的好坏,而不是某个位置的得失。对于这个问题,其实很简单,直接取平均就好。
回顾2.4.2中gold_score的计算,也正是在seq_len维度上取了平均。
拓展一下思维,除了取平均,我们当然也可以采用其他的思想来综合地衡量整个序列,例如,如果我们不怎么关心’O’label,更关心实体的话,可以根据label的类型不同,进行加权。
2.4.3 计算全部路径得分
这一部分一定要结合第1.3节来理解。
代码中的alpha,其实就是前面介绍的动态规划过程中为何的previous矩阵。
完整的代码如下:
def calc_norm_score(self, logits, lens):
"""
:param logits: (batch, seq_len, num_labels+2))
:param lens: (batch)
:return:
"""
batch_size, _, _ = logits.size()
alpha = logits.new_full((batch_size, self.label_size), -100.0) # 生成一个(batch, num_labels+2)的-100
alpha[:, self.start] = 0 # 每一步的状态分
lens_ = lens.clone()
logits_t = logits.transpose(1, 0) # (seq_len, batch, num_labels+2)
for logit in logits_t:
# 对每一个step进行遍历
logit_exp = logit.unsqueeze(-1).expand(batch_size, # 新增了一个维度,并复制了num_labels+2份
self.label_size,
self.label_size)
alpha_exp = alpha.unsqueeze(1).expand(batch_size, # 同理, (batch, num_labels+2, num_labels+2)
self.label_size,
self.label_size)
trans_exp = self.transition.unsqueeze(0).expand_as(alpha_exp) # (batch, num_labels+2, num_labels+2)
# 状态转移,每一步的得分是上一步的得分+状态分+转移分
mat = logit_exp + alpha_exp + trans_exp # (batch, num_labels+2, num_labels+2)
# 为下一步的转移生成prev矩阵
alpha_nxt = log_sum_exp(mat, 2).squeeze(-1) # (batch, num_labels+2)
mask = (lens_ > 0).float().unsqueeze(-1).expand_as(alpha)
alpha = mask * alpha_nxt + (1 - mask) * alpha
lens_ = lens_ - 1
alpha = alpha + self.transition[self.end].unsqueeze(0).expand_as(alpha) # 所有token遍历完之后加结束位
norm = log_sum_exp(alpha, 1).squeeze(-1)
return norm
然后我们一点一点来消化这部分代码:
首先前几行:
batch_size, _, _ = logits.size()
alpha = logits.new_full((batch_size, self.label_size), -100.0) # 生成一个(batch, num_labels+2)的-100
alpha[:, self.start] = 0
lens_ = lens.clone()
初始化了一个形状为(batch, num_labels+2)的alpha,如果不考虑batch的话,它其实就是1.3节里介绍的previous矩阵中的一行。
然后对logits进行了转置:
logits_t = logits.transpose(1, 0)
交换了batch和seq_len这两个维度,因为我们的状态转移发生在一个time step到下一个time step之间,所以接下来要对seq_len这个维度进行循环,所以把它换到最前面。
然后开始遍历,计算每一个step的所有可能的路径的路径分之和:
for logit in logits_t:
# 对每一个step进行遍历
logit_exp = logit.unsqueeze(-1).expand(batch_size, # 新增了一个维度,并复制了num_labels+2份
self.label_size,
self.label_size)
alpha_exp = alpha.unsqueeze(1).expand(batch_size, # 同理, (batch, num_labels+2, num_labels+2)
self.label_size,
self.label_size)
trans_exp = self.transition.unsqueeze(0).expand_as(alpha_exp) # (batch, num_labels+2, num_labels+2)
# 状态转移,每一步的得分是上一步的得分+状态分+转移分
mat = logit_exp + alpha_exp + trans_exp # (batch, num_labels+2, num_labels+2)
# 为下一步的转移生成prev矩阵
alpha_nxt = log_sum_exp(mat, 2).squeeze(-1) # (batch, num_labels+2)
mask = (lens_ > 0).float().unsqueeze(-1).expand_as(alpha)
alpha = mask * alpha_nxt + (1 - mask) * alpha
lens_ = lens_ - 1
可以看到,logit被复制了num_labels+2份(也就是 m m m份),logits是什么呢,前边的代码介绍中说了,是特征提取模型的特征映射到num_labels这个空间下的“概率”,也就是发射得分。
然后alpha也被同样的复制,就得到了previous矩阵。
再然后,得到了转移矩阵。
三个矩阵具有相同的形状(batch, num_labels+2, num_labels+2),对应位置元素三项相加,就是在执行状态转移了,得到的这个mat,就是1.3节对应的 Q Q Q了,紧接着对它求logsumexp,就得到了当前step(也就是截止当前token长度)的所有路径的得分之和。
算完了当前的step,再把这个alpha_nxt更新到alpha,作为下一个step的previous矩阵。
在遍历的最后,我们还需要把seq_len维度上的padding的部分给mask掉(因为代码在实际操作的时候是批处理的,所以短的句子末尾的padding需要mask),这样一来,一次完整的遍历就结束了。
当整个for循环完成之后,就到达了序列的末尾,最后要注意一下边界条件,要把结束位再算一下,就大功告成啦。
至于logsumexp是怎么计算的,这一版代码的实现方法如下:
def log_sum_exp(tensor, dim=0, keepdim: bool = False):
"""LogSumExp operation used by CRF."""
m, _ = tensor.max(dim, keepdim=keepdim)
if keepdim:
stable_vec = tensor - m
else:
stable_vec = tensor - m.unsqueeze(dim)
return m + (stable_vec.exp().sum(dim, keepdim=keepdim)).log()
回顾优化目标:
P r o b = e p r e a l e p 1 + e p 2 + . . . + e s e q l e n ∗ n u m l a b e l s Prob = \frac{e^{p_{real}}}{e^{p_{1}}+e^{p_{2}}+...+e^{seqlen*numlabels}} Prob=ep1+ep2+...+eseqlen∗numlabelsepreal
2.4.2节中,我们介绍了目标变量的分子部分的计算,2.4.3节中,介绍了分母的计算,这样一来,就可以回到2.4.1节中,完成损失函数的计算了。
2.5 模型的训练
之前讲过了本文的重点是帮助大家理解CRF的运作,所以具体怎么使用,会比较简略的介绍。
在计算损失函数之后,接下来要关心的是,如何把CRF模型放进BERT-CRF这个框架中去,并实现对它的训练呢?
在2.3节中,已经介绍了,BERT的编码结果是怎样输入给CRF的,
假设已经实例化好了bert模型和crf模型:
import torch.nn as nn
from transformers import BertModel, BertTokenizer
bert = BertModel.from_pretrained('bert-base-uncased')
tokenizer = BertTokenizer.from_pretrained('bert-base-uncased')
crf = CRF(vocab)
假设bert部分的损失采用的是交叉熵损失:
bert_criteria = nn.CrossEntropyLoss()
然后计算了bert的序列标注得分:
text = 'your text here.'
inputs = tokenizer(text)
bert_out = bert(inputs['input_ids'], attention_mask=inputs['attention_mask'])[0]
label_ffn = nn.Linear(bert_hidden_size, num_labels, bias=True)
label_scores = label_ffn(bert_out)
label_scores_softmax = label_scores.softmax(dim=2)
进而计算bert的损失:
label_scores_softmax = label_scores_softmax .view(-1, entity_type_num) # 这里的entity_type_num是实体类型数
bert_loss = bert_criterira(label_scores_softmax, real_labels) # real_labels是真实标签铺平
然后按照2.3节的步骤,把bert_out给到crf,计算crf的损失,并加到bert损失上(注意符号,求crf的损失要取负号):
label_scores = crf.pad_logits(label_scores)
crf_loglik = crf.loglik(label_scores,
label_idxs,
token_nums)
total_loss = bert_loss - crf_loss.mean()
最后,把这部分内容写到整个BERT-CRF模型训练时的forward方法里就可以了。
2.6 viterbi解码
解码发生在模型的预测阶段。这一部分会讲的相对简略一点,因为涉及到的思想和代码在之前其实都已经出现过了。
当我们训练好了一个CRF模型,这个模型的转移矩阵transition已经确定下来了,接下来我们需要根据外部的输入 X X X,也就是特征提取模型计算出来的logits,来结合CRF模型的状态转移,解码出最优的路径,作为序列标注任务的最终输出结果。
暴力解法当然是最容易想到的,不管序列有多长,全部的路径是有限的,那就把每一条路径的得分全都计算出来,然后取得分最高的。但是暴力法的复杂度,随着序列长度的增加,是呈指数增长的,因为在每一个token上,都会有 m m m种label可以选择,这样的复杂度,在真实场景中显然是无法接受的。
因此,viterbi解码被引入了,它的本质其实还是动态规划。
我们用 S c o r e [ s t a r t ] [ e n d ] Score_{[start][end]} Score[start][end]来表示从 s t a r t start start到 e n d end end位置的所有可能的得分,那么显然,求解的目标就是从开始位置 s o s sos sos到结束位置 e o s eos eos的所有可能的路径中,得分最大的一条路径:
P a t h ( m a x ( S c o r e [ s o s ] [ e o s ] ) ) Path(max(Score_{[sos][eos]})) Path(max(Score[sos][eos]))
那么,就可以向前递推,当我们想要求eos位置的最大分数,其实就是求红色圈中的三者得分转移到eos位置中的得分最大者:

那么在step3时,每一项,同样是求前面一步中,三项转移到step3的得分的最大者。
下面是代码,如果不太理解的话可以结合前面求所有路径分的动态规划过程,回顾一下torch中这几个操作时在做什么。
def viterbi_decode(self, logits, lens):
"""Borrowed from pytorch tutorial
Arguments:
logits: [batch_size, seq_len, n_labels] FloatTensor
lens: [batch_size] LongTensor
"""
batch_size, _, n_labels = logits.size()
vit = logits.new_full((batch_size, self.label_size), -100.0) # (batch, num_labels)形状的全-100
vit[:, self.start] = 0 # vit是动态规划中的状态转移,记录所有路径得分
c_lens = lens.clone()
logits_t = logits.transpose(1, 0) # (seq_len, batch, num_labels)
pointers = [] # 记录每一个step的label中对应的上一步的最大分
for logit in logits_t:
# 仍然是在seq_len的维度上进行遍历
vit_exp = vit.unsqueeze(1).expand(batch_size, n_labels, n_labels) # (batch, num_labels, num_labels)
trn_exp = self.transition.unsqueeze(0).expand_as(vit_exp) # 相同形状的转移分
vit_trn_sum = vit_exp + trn_exp
vt_max, vt_argmax = vit_trn_sum.max(2) # 在from的维度上求最大
vt_max = vt_max.squeeze(-1) # 删除求最值时作废的维度
vit_nxt = vt_max + logit # 为下一个step做准备
pointers.append(vt_argmax.squeeze(-1).unsqueeze(0)) # 当前step的所有label各自对应的上一step的最大分
mask = (c_lens > 0).float().unsqueeze(-1).expand_as(vit_nxt) # 每走一步,剩下的部分的有效mask就会少一个
vit = mask * vit_nxt + (1 - mask) * vit
mask = (c_lens == 1).float().unsqueeze(-1).expand_as(vit_nxt)
vit += mask * self.transition[self.end].unsqueeze( # mask掉padding部分
0).expand_as(vit_nxt)
c_lens = c_lens - 1 # 对mask生效
pointers = torch.cat(pointers)
scores, idx = vit.max(1) # 在to_label上求最大以找到得分最高的路径
paths = [idx.unsqueeze(1)] # 删除求最值时作废的维度
for argmax in reversed(pointers):
idx_exp = idx.unsqueeze(-1)
idx = torch.gather(argmax, 1, idx_exp)
idx = idx.squeeze(-1)
paths.insert(0, idx.unsqueeze(1))
paths = torch.cat(paths[1:], 1)
scores = scores.squeeze(-1)
return scores, paths
结束
本文从代码实现的角度,详细的介绍了CRF的运作原理,希望以此来帮助大家加深对CRF的理解和印象。创作不易,如果本文对你有所帮助的话,麻烦留下一个免费的赞。我们下期再见。