一文带你读懂深度学习中的张量(tensor)是什么,它的运算是怎样的,如何理解张量,张量的维度,浅显易懂
深度学习的数学基础(不要被吓到,很浅显)
数据表示与张量运算
张量
在多维 Numpy 数组中,也叫张量(tensor)。一般来说,当前所有机器学习系统都使用张量作为基本数据结构。
张量这一概念的核心在于,它是一个数据容器。它包含的数据几乎总是数值数据,因此它是数字的容器。你可能对矩阵很熟悉,它是二维张量。张量是矩阵向任意维度的推广[注意,张量的维度(dimension)通常叫作轴(axis)]
0. scalar 标量 0D张量
仅包含一个数字的张量叫作标量(scalar,也叫标量张量、零维张量、0D 张量)。在 Numpy中,一个 float32 或 float64 的数字就是一个标量张量(或标量数组)。你可以用 ndim 属性来查看一个 Numpy 张量的轴的个数。标量张量有 0 个轴(ndim == 0)。张量轴的个数也叫作阶(rank)。下面是一个 Numpy 标量。
1. vector 向量 1D张量
数字组成的数组叫作向量(vector)或一维张量(1D 张量)。一维张量只有一个轴。下面是一个 Numpy 向量。
\>>> x = np.array([12, 3, 6, 14, 7])
\>>> x
array([12, 3, 6, 14, 7])
\>>> x.ndim
1
这个向量有 5 个元素,所以被称为 5D 向量。不要把 5D 向量和 5D 张量弄混! 5D 向量只有一个轴,沿着轴有 5 个维度,而 5D 张量有 5 个轴(沿着每个轴可能有任意个维度)。维度(dimensionality)可以表示沿着某个轴上的元素个数(比如 5D 向量),也可以表示张量中轴的个数(比如 5D 张量),这有时会令人感到混乱。对于后一种情况,技术上更准确的说法是 5 阶张量(张量的阶数即轴的个数),但 5D 张量这种模糊的写法更常见。
补充:来自吴恩达《机器学习》
Vector : An n x 1 matrix
向量是一个只有一列的矩阵
2. matrix 矩阵 2D张量
\>>> x = np.array([[5, 78, 2, 34, 0],
[6, 79, 3, 35, 1],
[7, 80, 4, 36, 2]])
\>>> x.ndim
2
第一个轴上的元素叫作行(row),第二个轴上的元素叫作列(column)。在上面的例子中,[5, 78, 2, 34, 0] 是 x 的第一行,[5, 6, 7] 是第一列。
关键属性
- 轴的个数(阶)。例如,3D 张量有 3 个轴,矩阵有 2 个轴。这在 Numpy 等 Python 库中也叫张量的 ndim。
- 形状。这是一个整数元组,表示张量沿每个轴的维度大小(元素个数)。例如,前面矩阵示例的形状为 (3, 5),3D 张量示例的形状为 (3, 3, 5)。向量的形状只包含一个元素,比如 (5,),而标量的形状为空,即 ()。
- 数据类型(在 Python 库中通常叫作 dtype)。这是张量中所包含数据的类型,例如,张量的类型可以是 float32、uint8、float64 等。在极少数情况下,你可能会遇到字符(char)张量。注意,Numpy(以及大多数其他库)中不存在字符串张量,因为张量存储在预先分配的连续内存段中,而字符串的长度是可变的,无法用这种方式存储。
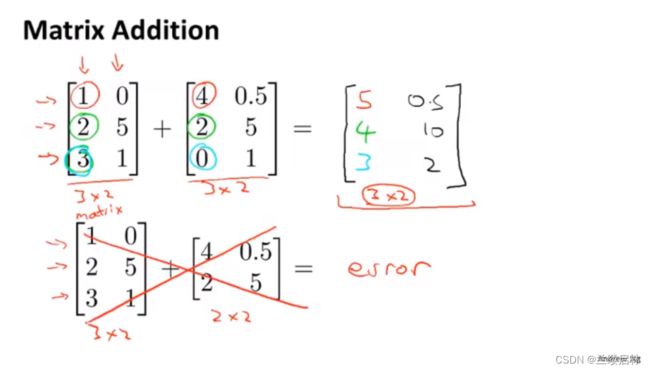
矩阵加法
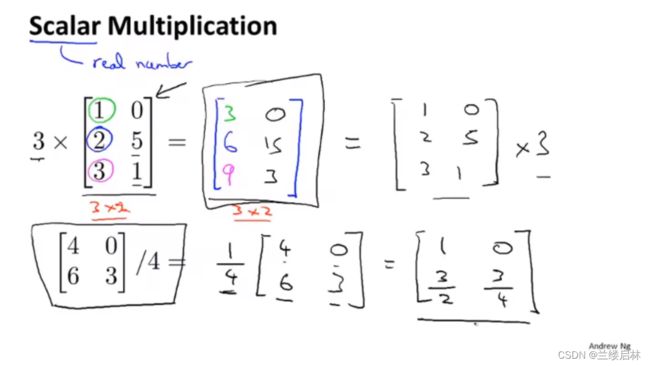
乘标量
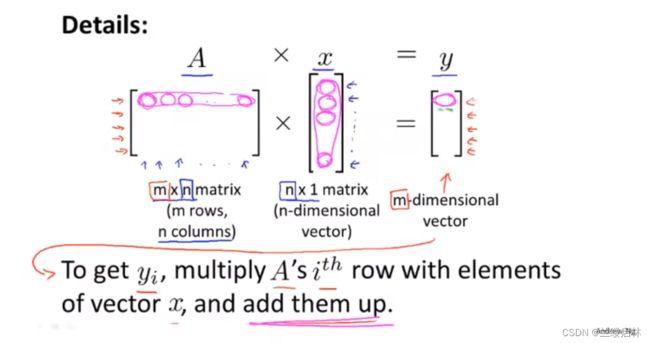
矩阵乘法
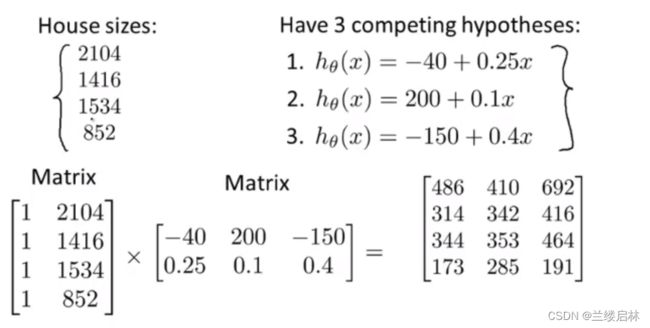
程序实现预测多个房子价格的技巧:用矩阵运算,而不用for,计算效率更高
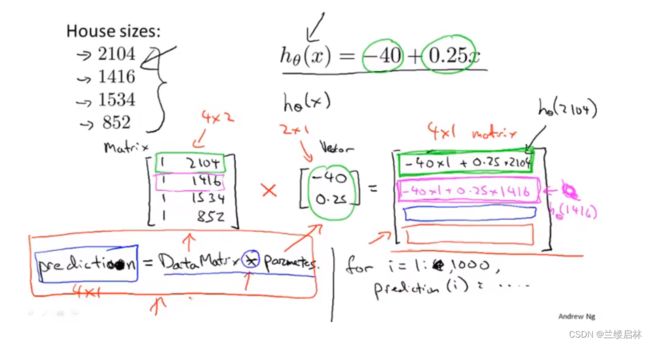
有多组可能参数的用矩阵乘矩阵,(相当于把第二个矩阵拆成若干个列向量)
数据批量
通常来说,深度学习中所有数据张量的第一个轴(0 轴,因为索引从 0 开始)都是样本轴(samples axis,有时也叫样本维度)。
对于这种批量张量,第一个轴(0 轴)叫作批量轴(batch axis)或批量维度(batch dimension)。
batch = train_images[:128]
batch = train_images[128:256]
batch = train_images[128 * n:128 * (n + 1)]
现实世界的数据张量
‰ 向量数据:2D 张量,形状为 (samples, features)。
‰ 时间序列数据或序列数据:3D 张量,形状为 (samples, timesteps, features)。
‰ 图像:4D 张量,形状为 (samples, height, width, channels) 或 (samples, channels,
height, width)。
‰ 视频:5D 张量,形状为 (samples, frames, height, width, channels) 或 (samples, frames, channels, height, width)。
向量数据
这是最常见的数据。对于这种数据集,每个数据点都被编码为一个向量,因此一个数据批量就被编码为 2D 张量(即向量组成的数组),其中第一个轴是样本轴,第二个轴是特征轴。
- 人口统计数据集,其中包括每个人的年龄、邮编和收入。每个人可以表示为包含 3 个值的向量,而整个数据集包含 100 000 个人,因此可以存储在形状为 (100000, 3) 的 2D张量中。
- 文本文档数据集,我们将每个文档表示为每个单词在其中出现的次数(字典中包含20 000 个常见单词)。每个文档可以被编码为包含 20 000 个值的向量(每个值对应于字典中每个单词的出现次数),整个数据集包含 500 个文档,因此可以存储在形状为(500, 20000) 的张量中。
时间序列数据或序列数据
当时间(或序列顺序)对于数据很重要时,应该将数据存储在带有时间轴的 3D 张量中。
每个样本可以被编码为一个向量序列(即 2D 张量),因此一个数据批量就被编码为一个 3D 张量。
根据惯例,时间轴始终是第 2 个轴(索引为 1 的轴)。我们来看几个例子。
- 股票价格数据集。每一分钟,我们将股票的当前价格、前一分钟的最高价格和前一分钟的最低价格保存下来。因此每分钟被编码为一个 3D 向量,整个交易日被编码为一个形状为 (390, 3) 的 2D 张量(一个交易日有 390 分钟),而 250 天的数据则可以保存在一个形状为 (250, 390, 3) 的 3D 张量中。这里每个样本是一天的股票数据。
- 推文数据集。我们将每条推文编码为 280 个字符组成的序列,而每个字符又来自于 128个字符组成的字母表。在这种情况下,每个字符可以被编码为大小为 128 的二进制向量(只有在该字符对应的索引位置取值为 1,其他元素都为 0)。那么每条推文可以被编码为一个形状为 (280, 128) 的 2D 张量,而包含 100 万条推文的数据集则可以存储在一个形状为 (1000000, 280, 128) 的张量中。
图像数据
图像通常具有三个维度:高度、宽度和颜色深度
虽然灰度图像(比如 MNIST 数字图像)只有一个颜色通道,因此可以保存在 2D 张量中,但按照惯例,图像张量始终都是 3D 张量,灰度图像的彩色通道只有一维。因此,如果图像大小为 256×256,那么 128 张灰度图像组成的批量可以保存在一个形状为 (128, 256, 256, 1) 的张量中,而 128 张彩色图像组成的批量则可以保存在一个形状为 (128, 256, 256, 3) 的张量中。
图像张量的形状有两种约定:通道在后(channels-last)的约定(在 TensorFlow 中使用)和通道在前(channels-first)的约定(在 Theano 中使用)。Google 的 TensorFlow 机器学习框架将颜色深度轴放在最后:(samples, height, width, color_depth)。与此相反,Theano将图像深度轴放在批量轴之后:(samples, color_depth, height, width)。如果采用 Theano 约定,前面的两个例子将变成 (128, 1, 256, 256) 和 (128, 3, 256, 256)。Keras 框架同时支持这两种格式。
视频数据
视频数据是现实生活中需要用到 5D 张量的少数数据类型之一。视频可以看作一系列帧,每一帧都是一张彩色图像。由于每一帧都可以保存在一个形状为 (height, width, color_depth) 的 3D 张量中,因此一系列帧可以保存在一个形状为 (frames, height, width, color_depth) 的 4D 张量中,而不同视频组成的批量则可以保存在一个 5D 张量中,其形状为**(samples, frames, height, width, color_depth)**。
举个例子,一个以每秒 4 帧采样的 60 秒 YouTube 视频片段,视频尺寸为 144×256,这个视频共有 240 帧。4 个这样的视频片段组成的批量将保存在形状为 (4, 240, 144, 256, 3)的张量中。总共有 106 168 320 个值!如果张量的数据类型(dtype)是 float32,每个值都是32 位,那么这个张量共有 405MB。好大!你在现实生活中遇到的视频要小得多,因为它们不以float32 格式存储,而且通常被大大压缩,比如 MPEG 格式。
张量运算
逐元素计算
relu 运算和加法都是**逐元素(element-wise)**的运算,即该运算独立地应用于张量中的每个元素,也就是说,这些运算非常适合大规模并行实现(向量化实现,这一术语来自于 1970—1990 年间向量处理器超级计算机架构)
def naive_relu(x):
assert len(x.shape) == 2
x = x.copy()
for i in range(x.shape[0]):
for j in range(x.shape[1]):
x[i, j] = max(x[i, j], 0)
return x
def naive_add(x, y):
assert len(x.shape) == 2
assert x.shape == y.shape
x = x.copy()
for i in range(x.shape[0]):
for j in range(x.shape[1]):
x[i, j] += y[i, j]
return x
根据同样的方法,你可以实现逐元素的乘法、减法等
广播
上一节 naive_add 的简单实现仅支持两个形状相同的 2D 张量相加。但在前面介绍的Dense 层中,我们将一个 2D 张量与一个向量相加。如果将两个形状不同的张量相加,如果没有歧义的话,较小的张量会被广播(broadcast),以匹配较大张量的形状。
- (1) 向较小的张量添加轴(叫作广播轴),使其 ndim 与较大的张量相同。
- (2) 将较小的张量沿着新轴重复,使其形状与较大的张量相同。
来看一个具体的例子。假设 X 的形状是 (32, 10),y 的形状是 (10,)。首先,我们给 y
添加空的第一个轴,这样 y 的形状变为 (1, 10)。然后,我们将 y 沿着新轴重复 32 次,这样得到的张量 Y 的形状为 (32, 10),并且 Y[i, :] == y for i in range(0, 32)。现在,我们可以将 X 和 Y 相加,因为它们的形状相同。
在实际的实现过程中并不会创建新的 2D 张量,因为那样做非常低效。重复的操作完全是虚拟的,它只出现在算法中,而没有发生在内存中。但想象将向量沿着新轴重复 10 次,是一种很有用的思维模型。下面是一种简单的实现。
def naive_add_matrix_and_vector(x, y):
assert len(x.shape) == 2
assert len(y.shape) == 1
assert x.shape[1] == y.shape[0]
x = x.copy()
for i in range(x.shape[0]):
for j in range(x.shape[1]):
x[i, j] += y[j]
return x
张量点积
点积运算,也叫张量积(tensor product,不要与逐元素的乘积弄混),是最常见也最有用的张量运算。与逐元素的运算不同,它将输入张量的元素合并在一起。
Numpy、Keras、Theano 和 TensorFlow 中,都是用 *** 实现逐元素乘积**。TensorFlow 中的点积使用了不同的语法,但在 Numpy 和 Keras 中,都是用标准的 dot 运算符来实现点积。
import numpy as np
z = np.dot(x, y)
数学符号中的点(.)表示点积运算。
z=x.y
两个向量的点积是一个标量
矩阵和向量的点积是一个向量
点积可以推广到具有任意个轴的张量。最常见的应用可能就是两个矩阵之间的点积。对于两个矩阵 x 和 y,当且仅当 x.shape[1] == y.shape[0] 时,你才可以对它们做点积(dot(x, y))。得到的结果是一个形状为 (x.shape[0], y.shape[1]) 的矩阵
更一般地说,你可以对更高维的张量做点积,只要其形状匹配遵循与前面 2D 张量相同的原则:
-
(a, b, c, d) . (d,) -> (a, b, c)
-
(a, b, c, d) . (d, e) -> (a, b, c, e)
张量变形
reshape
>>> x = np.array([[0., 1.],
[2., 3.],
[4., 5.]])
>>> print(x.shape)
(3, 2)
>>> x = x.reshape((6, 1))
转置transpose
>>> x = np.zeros((300, 20))
>>> x = np.transpose(x)
>>> print(x.shape)
(20, 300)
几何解释
张量的几何解释
对于张量运算所操作的张量,其元素可以被解释为某种几何空间内点的坐标
两个张量相加。从几何上来看,这相当于将两个向量箭头连在一起,得到的位置表示两个向量之和对应的向量
通常来说,仿射变换、旋转、缩放等基本的几何操作都可以表示为张量运算。举个例子,要将一个二维向量旋转 theta 角,可以通过与一个 2×2 矩阵做点积来实现,这个矩阵为 R = [u, v],其中 u 和 v 都是平面向量:u = [cos(theta), sin(theta)],v = [-sin(theta), cos(theta)]。
深度学习的几何解释
现在将两张纸一起揉成小球。这个皱巴巴的纸球就是你的输入数据,每张纸对应于分类问题中的一个类别。神经网络(或者任何机器学习模型)要做的就是找到可以让纸球恢复平整的变换,从而能够再次让两个类别明确可分。通过深度学习,这一过程可以用三维空间中一系列简单的变换来实现,比如你用手指对纸球做的变换让纸球恢复平整就是机器学习的内容:为复杂的、高度折叠的数据流形找到简洁的表示。
现在你应该能够很好地理解,为什么深度学习特别擅长这一点:它将复杂的几何变换逐步分解为一长串基本的几何变换,这与人类展开纸球所采取的策略大致相同。深度网络的每一层都通过变换使数据解开一点点——许多层堆叠在一起,可以实现非常复杂的解开过程。
基于梯度的优化
小批量随机梯度下降(mini-batch stochastic gradient descent,又称为小批量 SGD)。术语随机(stochastic)是指每批数据都是随机抽取的(stochastic 是 random在科学上的同义词 a)。
注意,小批量 SGD 算法的一个变体是每次迭代时只抽取一个样本和目标,而不是抽取一批数据。这叫作真 SGD(有别于小批量 SGD)。还有另一种极端,每一次迭代都在所有数据上运行,这叫作批量 SGD。这样做的话,每次更新都更加准确,但计算代价也高得多。这两个极端之间的有效折中则是选择合理的批量大小。
参考资料
本文参考自《python深度学习》