强化学习(第二版)Sutton - 第二章习题答案和解析
强化学习(第二版)Sutton - 习题答案和解析
- 第二章
-
- 2.1
- 2.2
- 2.3
- 2.4
- 2.6
- 2.7
- 2.8
- 2.9
- 2.10
- 2.5 & 2.11
强烈建议大家参考这位大佬的答案和解析,还有代码!!!
强化学习答案(第二版)
第二章
2.1
Q:在 ϵ \epsilon ϵ贪心动作选择中,在有两个动作及 ϵ = 0.5 \epsilon=0.5 ϵ=0.5的情况下,贪心动作被选择的概率是多少?
A:0.5的概率选择开发(exploitation),选择贪心动作,0.5的概率选择试探(exploration),试探时有0.5的概率选择贪心动作,所有是 0.5 + 0.5 ∗ 0.5 = 0.75 0.5+0.5*0.5=0.75 0.5+0.5∗0.5=0.75
2.2
Q:赌博机的例子 考虑一个 k = 4 k=4 k=4的多臂赌博机问题,记做 1 , 2 , 3 , 4 1,2,3,4 1,2,3,4。 将一个赌博机算法应用与这个问题,算法使用 ϵ − ϵ- ϵ−贪心动作选择,基于采样平均的动作价值估计,初始估计为 Q 1 ( a ) = 0 , ∀ a Q_1(a)=0, \forall a Q1(a)=0,∀a。假设动作及收益的最初顺序是 A 1 = 1 , R 1 = − 1 , A 2 = 2 , R 2 = 1 , A 3 = 2 , R 3 = − 2 , A 4 = 2 , R 4 = 2 , A 5 = 3 , R 5 = 0 A_1=1,R_1=-1,A_2=2, R_2=1,A_3=2,R_3=-2,A_4=2, R_4=2,A_5=3,R_5=0 A1=1,R1=−1,A2=2,R2=1,A3=2,R3=−2,A4=2,R4=2,A5=3,R5=0。在其中的某些案例中可能发生了 ϵ ϵ ϵ的情形导致一个动作被随机选择。请回答,在哪些时刻中这种情形肯定发生了?在哪些时刻中这些情形可能发生了?
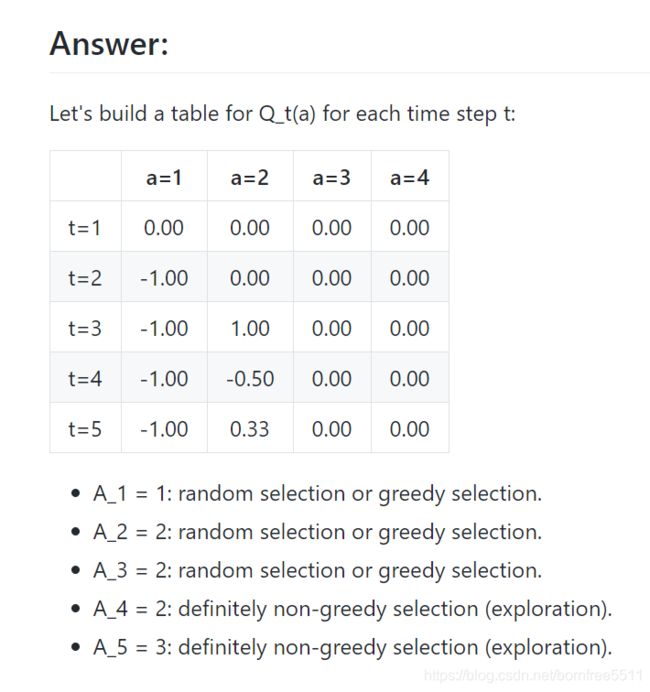
参考:https://github.com/borninfreedom/rlai-exercises/blob/master/Chapter%202/Exercise%202.2.md
2.3
Q:在图2.2所示的比较中,从累积收益和选择最佳动作的可能性的角度考虑,哪种方法会在长期表现最好?好多少?定量地表达你的答案。
A1:选择最优动作的概率是99.1%和91%,因为当进行试探的时候,也有可能选择最优的动作。 即 ( 1 − 0.01 ) + 0.01 ∗ 1 / 10 = 99.1 (1-0.01)+0.01*1/10=99.1% (1−0.01)+0.01∗1/10=99.1 和 ( 1 − 0.1 ) + 0.1 ∗ 1 / 10 = 91 (1-0.1)+0.1*1/10=91% (1−0.1)+0.1∗1/10=91.
(because there are 10-armed bandits, so there is a 1/10).
— answer from PiggyCh
A2:

2.4

2.6
Q:神秘的尖峰 图2.3中展示的结果应该是相当可靠的,因为他们是2000个独立随机的10臂赌博机任务的平均值。那么为什么乐观初始化方法在曲线的早期会出现振荡和峰值呢?换句话说,是什么使得这种方法在特定的早期步骤中表现的特别好或更糟?
A:在第10步训练步数之后的某点,智能体将会找到最优的动作值。它将会贪心的选择这个值。小的步长参数意味着对最优值的估计将会很慢的收敛到真值。看起来这个真值小于5。这意味着因为小的步长,次优的动作仍然会有一个接近于5的价值。因此,在某些点,智能体开始不断的选择次优动作。
2.7


2.8
Q:USB尖峰 在图2.4中,UCB算法的表现在第11步的时候有一个非常明显的尖峰。为什么会产生这个尖峰呢?请注意,你必须同时解释为什么收益在第11步时会增加,以及为什么在后续的若干步中会减少,你的答案才是令人满意的。提示如果 c = 1 c=1 c=1,那么这个尖峰就不会那么突出了

2.9
Q:证明在两种动作的情况下,softmax分布与通常在统计学和人工神经网络中使用的logistic或sigmoid函数给出的结果相同


2.10

2.5 & 2.11
#######################################################################
# Copyright (C) #
# 2016-2018 Shangtong Zhang([email protected]) #
# 2016 Tian Jun([email protected]) #
# 2016 Artem Oboturov([email protected]) #
# 2016 Kenta Shimada([email protected]) #
# Permission given to modify the code as long as you keep this #
# declaration at the top #
#######################################################################
import matplotlib
import matplotlib.pyplot as plt
import numpy as np
from tqdm import trange
matplotlib.use('Agg')
class Bandit:
# @k_arm: # of arms
# @epsilon: probability for exploration in epsilon-greedy algorithm
# @initial: initial estimation for each action
# @step_size: constant step size for updating estimations
# @sample_averages: if True, use sample averages to update estimations instead of constant step size
# @UCB_param: if not None, use UCB algorithm to select action
# @gradient: if True, use gradient based bandit algorithm
# @gradient_baseline: if True, use average reward as baseline for gradient based bandit algorithm
def __init__(self, k_arm=10, epsilon=0., initial=0., step_size=0.1, sample_averages=False, UCB_param=None,
gradient=False, gradient_baseline=False, true_reward=0.):
self.k = k_arm
self.step_size = step_size
self.sample_averages = sample_averages
self.indices = np.arange(self.k)
self.time = 0
self.UCB_param = UCB_param
self.gradient = gradient
self.gradient_baseline = gradient_baseline
self.average_reward = 0
self.true_reward = true_reward
self.epsilon = epsilon
self.initial = initial
def reset(self):
# real reward for each action
self.q_true = np.random.randn(self.k) + self.true_reward
# estimation for each action
self.q_estimation = np.zeros(self.k) + self.initial
# # of chosen times for each action
self.action_count = np.zeros(self.k)
self.best_action = np.argmax(self.q_true)
self.time = 0
# get an action for this bandit
def act(self):
if np.random.rand() < self.epsilon:
return np.random.choice(self.indices)
if self.UCB_param is not None:
UCB_estimation = self.q_estimation + \
self.UCB_param * np.sqrt(np.log(self.time + 1) / (self.action_count + 1e-5))
q_best = np.max(UCB_estimation)
return np.random.choice(np.where(UCB_estimation == q_best)[0])
if self.gradient:
exp_est = np.exp(self.q_estimation)
self.action_prob = exp_est / np.sum(exp_est)
return np.random.choice(self.indices, p=self.action_prob)
q_best = np.max(self.q_estimation)
return np.random.choice(np.where(self.q_estimation == q_best)[0])
# take an action, update estimation for this action
def step(self, action):
# generate the reward under N(real reward, 1)
reward = np.random.randn() + self.q_true[action]
self.time += 1
self.action_count[action] += 1
self.average_reward += (reward - self.average_reward) / self.time
if self.sample_averages:
# update estimation using sample averages
self.q_estimation[action] += (reward - self.q_estimation[action]) / self.action_count[action]
elif self.gradient:
one_hot = np.zeros(self.k)
one_hot[action] = 1
if self.gradient_baseline:
baseline = self.average_reward
else:
baseline = 0
self.q_estimation += self.step_size * (reward - baseline) * (one_hot - self.action_prob)
else:
# update estimation with constant step size
self.q_estimation[action] += self.step_size * (reward - self.q_estimation[action])
return reward
def simulate(runs, time, bandits):
rewards = np.zeros((len(bandits), runs, time))
best_action_counts = np.zeros(rewards.shape)
for i, bandit in enumerate(bandits):
for r in trange(runs):
bandit.reset()
for t in range(time):
action = bandit.act()
reward = bandit.step(action)
rewards[i, r, t] = reward
if action == bandit.best_action:
best_action_counts[i, r, t] = 1
mean_best_action_counts = best_action_counts.mean(axis=1)
mean_rewards = rewards.mean(axis=1)
return mean_best_action_counts, mean_rewards
def figure_2_1():
plt.violinplot(dataset=np.random.randn(200, 10) + np.random.randn(10))
plt.xlabel("Action")
plt.ylabel("Reward distribution")
plt.savefig('../images/figure_2_1.png')
plt.close()
def figure_2_2(runs=2000, time=1000):
epsilons = [0, 0.1, 0.01]
bandits = [Bandit(epsilon=eps, sample_averages=True) for eps in epsilons]
best_action_counts, rewards = simulate(runs, time, bandits)
plt.figure(figsize=(10, 20))
plt.subplot(2, 1, 1)
for eps, rewards in zip(epsilons, rewards):
plt.plot(rewards, label='epsilon = %.02f' % (eps))
plt.xlabel('steps')
plt.ylabel('average reward')
plt.legend()
plt.subplot(2, 1, 2)
for eps, counts in zip(epsilons, best_action_counts):
plt.plot(counts, label='epsilon = %.02f' % (eps))
plt.xlabel('steps')
plt.ylabel('% optimal action')
plt.legend()
plt.savefig('../images/figure_2_2.png')
plt.close()
def figure_2_3(runs=2000, time=1000):
bandits = []
bandits.append(Bandit(epsilon=0, initial=5, step_size=0.1))
bandits.append(Bandit(epsilon=0.1, initial=0, step_size=0.1))
best_action_counts, _ = simulate(runs, time, bandits)
plt.plot(best_action_counts[0], label='epsilon = 0, q = 5')
plt.plot(best_action_counts[1], label='epsilon = 0.1, q = 0')
plt.xlabel('Steps')
plt.ylabel('% optimal action')
plt.legend()
plt.savefig('../images/figure_2_3.png')
plt.close()
def figure_2_4(runs=2000, time=1000):
bandits = []
bandits.append(Bandit(epsilon=0, UCB_param=2, sample_averages=True))
bandits.append(Bandit(epsilon=0.1, sample_averages=True))
_, average_rewards = simulate(runs, time, bandits)
plt.plot(average_rewards[0], label='UCB c = 2')
plt.plot(average_rewards[1], label='epsilon greedy epsilon = 0.1')
plt.xlabel('Steps')
plt.ylabel('Average reward')
plt.legend()
plt.savefig('../images/figure_2_4.png')
plt.close()
def figure_2_5(runs=2000, time=1000):
bandits = []
bandits.append(Bandit(gradient=True, step_size=0.1, gradient_baseline=True, true_reward=4))
bandits.append(Bandit(gradient=True, step_size=0.1, gradient_baseline=False, true_reward=4))
bandits.append(Bandit(gradient=True, step_size=0.4, gradient_baseline=True, true_reward=4))
bandits.append(Bandit(gradient=True, step_size=0.4, gradient_baseline=False, true_reward=4))
best_action_counts, _ = simulate(runs, time, bandits)
labels = ['alpha = 0.1, with baseline',
'alpha = 0.1, without baseline',
'alpha = 0.4, with baseline',
'alpha = 0.4, without baseline']
for i in range(len(bandits)):
plt.plot(best_action_counts[i], label=labels[i])
plt.xlabel('Steps')
plt.ylabel('% Optimal action')
plt.legend()
plt.savefig('../images/figure_2_5.png')
plt.close()
def figure_2_6(runs=2000, time=1000):
labels = ['epsilon-greedy', 'gradient bandit',
'UCB', 'optimistic initialization']
generators = [lambda epsilon: Bandit(epsilon=epsilon, sample_averages=True),
lambda alpha: Bandit(gradient=True, step_size=alpha, gradient_baseline=True),
lambda coef: Bandit(epsilon=0, UCB_param=coef, sample_averages=True),
lambda initial: Bandit(epsilon=0, initial=initial, step_size=0.1)]
parameters = [np.arange(-7, -1, dtype=np.float),
np.arange(-5, 2, dtype=np.float),
np.arange(-4, 3, dtype=np.float),
np.arange(-2, 3, dtype=np.float)]
bandits = []
for generator, parameter in zip(generators, parameters):
for param in parameter:
bandits.append(generator(pow(2, param)))
_, average_rewards = simulate(runs, time, bandits)
rewards = np.mean(average_rewards, axis=1)
i = 0
for label, parameter in zip(labels, parameters):
l = len(parameter)
plt.plot(parameter, rewards[i:i+l], label=label)
i += l
plt.xlabel('Parameter(2^x)')
plt.ylabel('Average reward')
plt.legend()
plt.savefig('../images/figure_2_6.png')
plt.close()
if __name__ == '__main__':
figure_2_1()
figure_2_2()
figure_2_3()
figure_2_4()
figure_2_5()
figure_2_6()
参考:
- https://rs11.xyz/articles/38.html
- https://1drv.ms/b/s!AtqFsO4cylhQgooFVAF1GZQuLOLsnA?e=zO3UmE
- https://github.com/borninfreedom/reinforcement-learning-an-introduction/blob/master/chapter02/ten_armed_testbed.py