不用车载传感器,也能L4级自动驾驶?清华百度联手发布全球首个纯路侧感知自动驾驶方案...
鱼羊 发自 凹非寺
量子位 报道 | 公众号 QbitAI
车上不用传感器,也能自动驾驶?

听上去有些不可思议,但现在,百度Apollo&清华真的把这项技术搞了出来。
就在清华大学智能产业研究院(AIR)的学术沙龙上,清华和百度Apollo联合发布了一项名为Apollo Air的计划。
这是目前为止,全球唯一一个使用纯路侧感知能力,实现开放道路L4自动驾驶闭环的技术方案。
等等,纯靠道路上的传感器完成感知?
那岂不是说,普通汽车也有机会实现无人驾驶了?
这究竟是怎么一回事?
不靠车端传感器的自动驾驶,是怎么一回事?
先来看看Apollo Air的整体技术路线。
据百度智能交通产品研发总经理陶吉介绍,Apollo Air的特点在于:
在不使用车载传感器,仅依靠路侧轻量感知的前提下,利用V2X(车联网)、5G等无线通信技术,实现车-路-云协同。

具体如何实现?
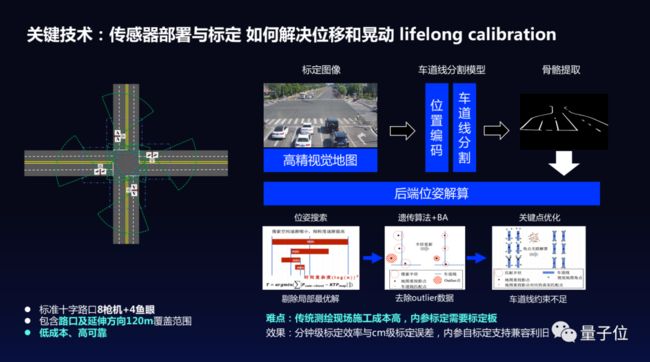
所谓路侧轻量感知,是在进行路侧配置及部署时,使用最少点位来实现路口路段全覆盖。
一个路口中,4套设备(8枪机+4鱼眼)就能够完全覆盖路口及其延伸方向120米的区域。
其中的关键技术还涉及到传感器标定,也就是如何解决位移和晃动的问题。
除了传感器的部署和标定,另一个在纯路侧感知方案中必须解决的核心问题,是时延。
陶吉介绍,实际上,路端的时延只需跟车端对齐,做到200ms以下就能保证其可靠性。
具体而言,在路侧感知融合上,Apollo Air一方面利用AI相机来节省视频编解码时延,另一方面并行化局部高精地图。
在空口传输方面,则定制化LTE-V网络层,进行包长限制优化、底层收发方式优化,并对视觉数据进行帧内/帧间压缩。
最后在车端预处理上,通过轨迹预测模型来补偿丢包。

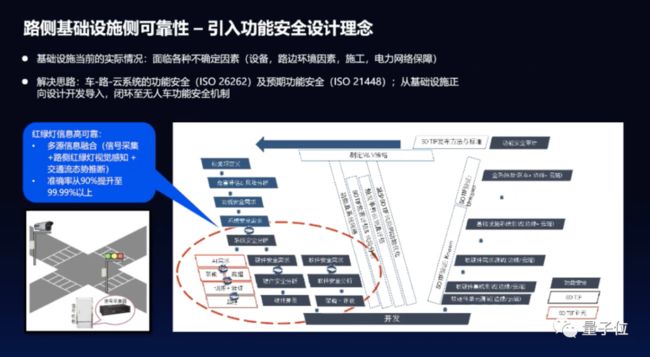
还有一个值得一提的点是,在实际环境当中,路侧基础设施其实面临着各种不稳定因素,比如道路施工、断电……
因此,引入功能安全设计理念就显得十分重要。Apollo Air的解决思路是,依靠多源信息融合,通过信息采集+路侧红绿灯视觉感知+交通流态势推断,从软硬件两方面着手,来整体提升路侧感知的安全性。
简单总结起来,Apollo Air其实就是通过路侧感知系统、云端处理能力,结合低时延的新一代通信技术,在车辆之外构建起一套稳定的自动驾驶感知系统,替代掉车上的感知系统。
比起单车智能,这样的技术方案复杂性更高,系统链条也更长,并且正如陶吉所说,“一辆普通的有人车也可能成为一辆具备自动驾驶能力的无人车”。
目前,百度智能交通团队已经完成了Apollo Air纯路侧感知技术在L4真实场景中的测试。
另外,Apollo Air项目还承诺,会定期披露研发案例和数据,以不断明确符合自动驾驶需求的基础设施技术条件。
同时,车-路-云之间的数据接口会通过开源、标准化的方式与业界共享,来促进行业的整体发展。
“激进”方案,意义何在?
不仅不要激光雷达,其他车载传感器基本也不用打开,乍一听这样的L4级自动驾驶技术方案,难免感觉有些出乎意料。
但其实,Apollo Air计划的目的,并不是取代现有的车载感知+路侧感知的车路协同技术路线。更确切地说,这相当于是针对路侧感知、云端系统等基础设施的压力测试。
作为车路协同领域的先行者,2019年,百度Apollo就在开放道路智能驾驶长沙示范区,结合V2X技术,推出了中国首个面向普通民众的Robotaxi试运营服务;2020年,百度Apollo又率先发布了全球首个车路行融合的全栈式智能交通解决方案“ACE智能交通引擎”,并很快在全国近二十个城市实现落地。
比如,在广州黄埔区,通过AI路侧感知体系和云端引擎,为普通车用户提供高精度实时道路信息等网联化服务。
在这样长期的技术积累、落地实践当中,百度的技术人员们发现了这样的问题:在传统车载感知为主、路侧感知为辅的车路协同方案中,路侧感知自身的问题和缺陷容易被掩盖,路侧感知的效果也容易受到与车端感知的融合度的影响。
因此,Apollo Air完全抛开车端感知的技术方案,并非什么“激进”之举,反而是为了进一步增强无人驾驶感知系统的安全冗余,提升无人驾驶系统的鲁棒性和安全性。

陶吉就对此解释说,百度发布Apollo Air计划,是希望以路侧感知技术的提升来加强车路协同的融合感知框架,从而更好地为中国自动驾驶发展提供安全保证。
Apollo Air计划就是让车路协同成为单车智能在黑夜里的一盏明灯。
对于百度而言,Apollo Air一方面再次证明了其在车路协同领域深厚的技术积累和技术实力,另一方面,也有利于提升百度L4级别自动驾驶,在开放道路连续路网中的平均接管里程。
不仅如此,这样领先的技术方案,也能够被向下辐射到量产产品中,进一步提升百度车路协同量产产品和方案的竞争力。
实际上,车路协同一直以来也被认为是中国自动驾驶发展技术路线的独特之处,甚至可以说是中国比其他国家更早实现自动驾驶落地的关键所在。
不少自动驾驶业内人士都曾表示,中国的路况在世界范围内属于比较复杂的范畴,这就给L4级自动驾驶的落地带来了“最后1%”的问题。
想要让自动驾驶技术能在中国更快落地,同时也给无人车再上一道安全保险,车路协同可以说是当前的最优解:
一方面,有天时地利。车路协同需要强大的基础设施建设能力,作为“基建狂魔”,中国早已将智能交通纳入新基建的范畴。
另一方面,有人和。相比于单车智能,车路协同更强调基础设施,不仅需要对自动驾驶技术有更深入的理解,其高投入也直接抬高了技术研发的准入门槛。而百度这样的巨头入场,恰恰解决了技术和钱两方面的问题。
并且,像Apollo Air这样开源开放的平台,也有利于车路协同技术的共享,和产业标准化的实现。
正所谓,既有个人奋斗,亦是历史进程。
那么,关于车路协同,你还有什么样的见解?欢迎与我们分享~