论文记录:Topology-aware Convolutional Neural Network for Efficient Skeleton-based Action Recognition
论文记录:Topology-aware Convolutional Neural Network for Efficient Skeleton-based Action Recognition(AAAI 2022)
论文地址:https://arxiv.org/abs/2112.04178
代码地址:https://github.com/hikvision-research/skelact
Abstract
- 本文提出了一种纯CNN结构,名为拓扑感知CNN(Ta-CNN),包括CAG和VAG模块,缓解了CNN在不规则骨架拓扑建模差的问题。
- 理论上分析了图卷积和普通卷积的关系,证实GCN的建模能力,使用CNN也能实现。
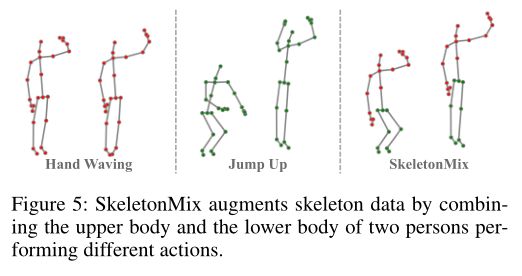
- 提出SkeletonMix策略,进行数据增强。
Method
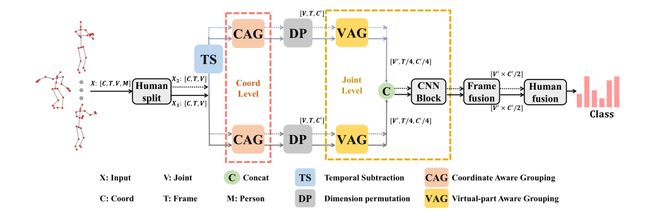
骨骼行为识别任务的输入是一系列骨架数据 X ∈ R C × T × V X\in R^{C\times T\times V} X∈RC×T×V, C C C、 T T T和 V V V分别代表坐标维度、时间序列长度和关节数。将C作为图像数据的通道,T、V作为图像的宽、高来进行卷积(和HCN一样)。
CAG模块
作者为了验证不同坐标重要性的假设做了一个小实验,最后得到的结论是坐标的特征更加重要。
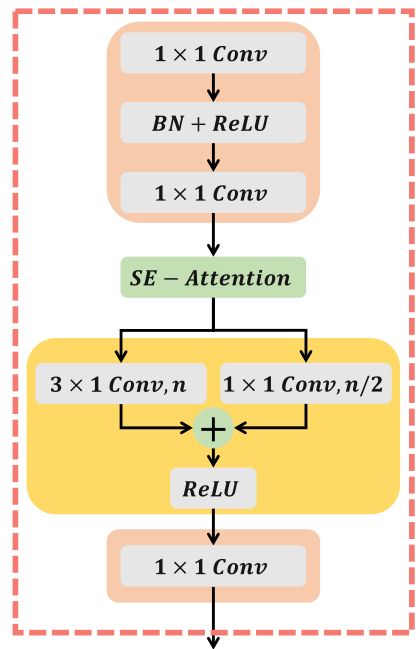
坐标感知分组(CAG)模块分为三个步骤,分别为Feature Mapping,Channel attention,Dual Coordinate-wise Convolution.\
- Feature Mapping: 几个逐点卷积+BN层
- Channel attention: 一个通道注意力模块
- Dual Coordinate-wise Convolution: 分为了两个branch,其实就是分组的Channel-wise卷积,两个分支分别分为n组和n/2组,分别提取不同粒度特征。
CAG模块的结构图:
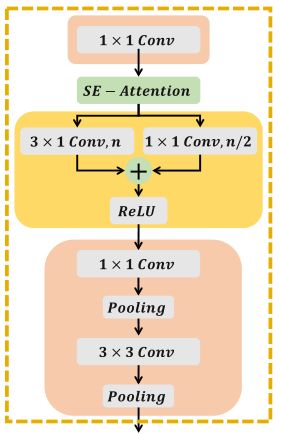
VAG模块
VAG模块结构和CAG相比稍作调整,但是VAG模块是在关节维度而非坐标维度上做的。作者在文中说,通过两个分组卷积分支,可以将虚拟关节划分为多个虚拟部分。该模块结构如下:
图卷积可看作为一种特殊的普通卷积
对于输入的骨架序列 X ∈ R C × T × V X\in R^{C\times T\times V} X∈RC×T×V,图卷积的过程可看作:
Y = W X A Y=WXA Y=WXA
其中 A ∈ R V × V A\in R^{V \times V} A∈RV×V为邻接矩阵,表示骨架拓扑信息, W ∈ R C ′ × C W\in R^{C'\times C} W∈RC′×C为权重矩阵。如果忽视特征变换,其核心计算为
Y c , t , v = ∑ u = 0 V − 1 X c , t , u A u , v Y_{c,t,v}=\sum_{u=0}^{V-1}{X_{c,t,u}A_{u,v}} Yc,t,v=∑u=0V−1Xc,t,uAu,v
可以看出GCN的本质是在邻接矩阵的指导下,通过加权平均来聚合所有关节的时空特征。
现在把关节维度看作通道,即输入 X ∈ R V × T × C X\in R^{V\times T\times C} X∈RV×T×C,对输入做一个 P × Q P\times Q P×Q的卷积,式子为
Y v , t , c = ∑ u = 0 V − 1 ∑ p = 0 P − 1 ∑ q = 0 Q − 1 ω v , u , p , q X u , t + p − P / 2 , c + q − Q / 2 Y_{v,t,c}=\sum_{u=0}^{V-1}\sum_{p=0}^{P-1}\sum_{q=0}^{Q-1}\omega_{v,u,p,q}X_{u,t+p-P/2,c+q-Q/2} Yv,t,c=∑u=0V−1∑p=0P−1∑q=0Q−1ωv,u,p,qXu,t+p−P/2,c+q−Q/2
当卷积核大小为 1 × 1 1\times 1 1×1时,则上式简化为
Y v , t , c = ∑ u = 0 V − 1 ω v , u X u , t , c Y_{v,t,c}=\sum_{u=0}^{V-1}\omega_{v,u}X_{u,t,c} Yv,t,c=∑u=0V−1ωv,uXu,t,c
从这个式子看出,当输入通道和输出通道相同,邻接矩阵作为权重,卷积则等价于图卷积。作者表示如果使用更大卷积核则可以感知更多信息。并且CNN相比GCN更加灵活。
SkeletonMix
这里做了个数据增强,将两个不同动作的骨架,一个取上半身一个取下半身拼接在一起。示意图:
Ta CNN框架
采用双流网络,一个输入skeleton信息,一个输入motion信息。