HNSW算法(nsmlib/hnswlib)
一、数据结构
1、HierarchicalNSW类成员描述
| 成员 |
描述 |
| num_deleted_ | 有过删除某向量的次数。 PS:不考虑增量情况下,它不会发生影响 |
| M_ |
每个(非0层)节点可以有多少个邻居 |
| maxM_ |
maxM_ = M_ |
| maxM0_ |
第0层节点可以有多少个邻居 = 2 * maxM_ |
| ef_construction_ |
潜在邻居列表,用于优选邻居 |
| ef_ | 实际意义不大参数 |
| data_size_ |
每条原始向量需占多少字节 = dim * sizeof(float) |
| size_links_level0_ |
第0层节点的邻居表,需占多少字节 = maxM0_ * 4 + 4 |
| size_data_per_element_ |
第0层节点表中,需占多少字节 = size_links_level0_ + data_size_ + 8(存储label,64位cpu) |
| offsetLevel0_ |
0。这个子段无实际意义 |
| offsetData_ |
数据域offset = size_links_level0_ |
| label_offset_ |
label的offset = size_links_level0_ + data_size_ |
| max_elements_ |
最大数据量,构建时指定,可以热更新(resizeIndex) |
| cur_element_count |
当前记录数,初始为0 |
| fstdistfunc_ |
一个快速计算(L2/IP)距离的func |
| dist_func_param_ |
维度 |
| maxlevel_ |
索引当前层数,初始为-1 |
| element_levels_ |
每个节点在哪一层,是vector数组,数组索引是节点内部id。vector,初始化为max_elements个0 |
| mult_ |
1 / log(1.0 * M_),用于计算新增向量落在哪一层。层 = -log(0.0~0.1随机数) / log(M_),M_越大,层越小。 |
| revSize_ |
1/mult_ = log(1.0 * M_) |
| enterpoint_node_ |
随机进入点的内部id,初始为-1, |
| link_list_locks_ |
节点邻居表锁,每个节点一个。vector,初始化为max_elements个std::mutex |
| cur_element_count_guard_ |
增员减员锁 |
| global | 全局互斥锁,增加新成员时可能上锁 |
| link_list_update_locks_ |
更新占坑锁,它限定了增量的速度,个数由下面的max_update_element_locks决定。vector,初始化为max_update_element_locks个std::mutex |
| max_update_element_locks |
决定全局同时最多可以有多少个向量在增加,构建时指定,默认65536 |
| level_generator_ |
随机数发生器,决定新增的向量在哪一层 |
| update_probability_generator_ |
随机数发生器,增量更新时,概率的让邻居节点更新邻居。实际上不生效。 |
| label_lookup_ |
label与内部id的映射,unordered_map |
| data_level0_memory_ |
节点表,char*,连续数组 |
| linkLists_ |
节点邻居跳表,char**,每个节点对应数据依然是连续数组 |
| size_links_per_element_ |
每个节点对应邻居跳表,在每一层需占的空间 = maxM_ * 4 + 4 |
| visited_list_pool_ |
图操作经常需要判断哪些节点已经走过,这里提供一个已经申请好空间的池子,减少内存频繁申请释放的开销 |
2、数据结构分析
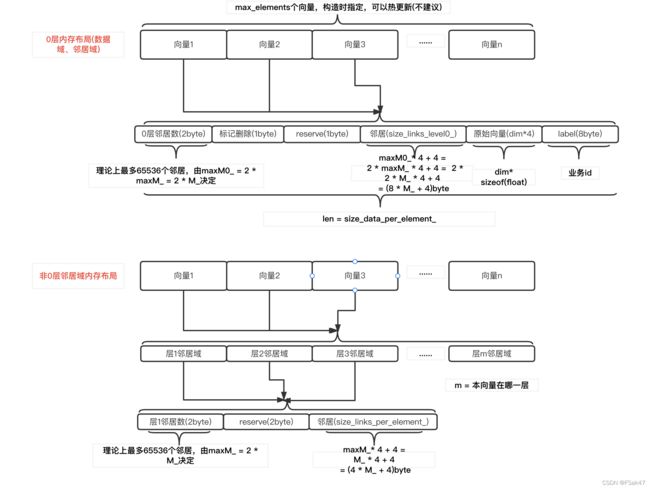
0层内存
和跳表一样,第0层保存了全部向量数据。包括向量数据域(原始向量、label(向量的业务id))、邻居域(每个向量在第0层的近邻向量id)。
数据结构如上图:
首先是header,header前2字节指定该向量在0层当前有几个邻居,后面一字节是标记删除位(增量构建用到),为内存对齐header第四字节废弃;
然后是邻居域:这里实际是在构造时就申请好了内存,每个0层向量可以有maxM0_个邻居向量(是非0层的2倍),占用字节数 = maxM0_ * 4 + 4字节
最后是数据域:占用字节数 = dim * sizeof(float) = dim * 4字节,以及label,对于我们就是向量id(如feed_id、video_id),占用8字节,共计dim*4+8字节
0层全部数据保存在data_level0_memory_,构造索引时通过参数max_elements指定索引最大向量个数,data_level0_memory_一次性申请max_elements * size_data_per_element_字节的内存。目前我们在使用中没有考虑热更新,max_elements均设置为构建索引时数据量。
提供resizeIndex函数,指定新的最大向量个数max_elements,只是调整0层内存的同时,还要调整节点跳表、节点层映射、遍历回溯池等内存。如考虑热更新,建议构建时设置业务足够大的max_elements,并走增量更新。
非0层内存
非0层主要存储每个向量在各个层的邻居表。具体是保存了每个向量丛它所在层向低层的邻居。如向量a构建时落在第3层,那么构建过程会不断更新它在1、2、3层的邻居向量。
linkLists_是邻居表存储实体,是一个二维数组,行由max_elements即最大向量个数指定,列由该向量实际落在的层数,在构建该向量时具体分配内存。
hnsw的本质
图近邻查询最容易想到的思路
图作为近邻查询最容易被想到的方式就是,距离相近的向量,成为图相邻点,这样查询就可以像
a、当给出一个待查询向量,从图中哪个节点开始查询?
和faiss-IVF系索引(IVFflat、IVFPQ)等不同,图并没有聚类索引,那么怎么知道从哪查?
b、为解决问题a,可以比如随机选一个向量作为查询入口,但是每个向量都以和自己非常相近的向量相连(某种意义上就像faiss-IVF系索引的感觉),与待查询向量距离很远并不相连,那么图是需要很久才能走到待查询向量所在区域的。
所以需要一种,能够让每个图节点,不仅和近邻相连,还能"有机的"和稍远的节点相连,且还要有效控制相连节点个数,避免查询很慢。
图近邻查询
据调研图近邻查询,脱不出如下b、c、d机制:
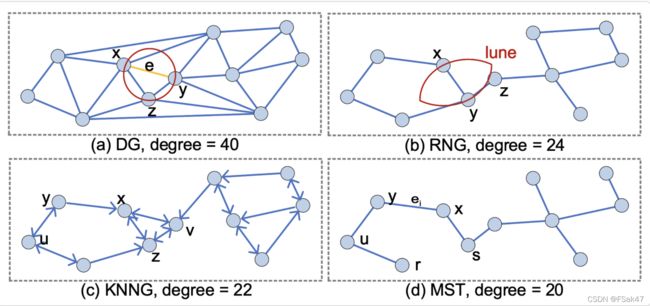
这次分享主要考虑b,不展开c、d。其中c是一些大厂近期取得成功突破的地方,后续将重点研究。
a是所可以达到召回率=1的理想机制,它能确保从任意一个点出发,都获取完全精确的结果,它的构建思路是:针对每个节点,在构建过程中,不断保证最近邻的k个节点作为邻居相连。这种方式随着数据量增大,节点相连量之大极度严重,即便做一些规则优化也不行(hnsw前身nsw)
b是hnsw的机制,hnsw主要做了两方面的优化:
b.1、通过"排除近亲"的机制,增强每个向量与随机的更远向量的相连能力
所谓"排除近亲"机制,就是当计算新增向量a的邻居向量时,如果待新增的邻居向量b,与已经加入邻居的向量c的距离,小于b与a的距离,那么b不予以加入邻居。
b.2、如跳表一样,拟合对数分布的数据分层,形成节点由少至多的层次分布,每个向量均在所在及以下层次,维护自己的本层近邻。
这样,查询入口向量(enterpoint)由最高层的最新加入向量充当,增量构建时,都由enterpoint查到和待处理向量近邻的近邻向量集合,作为待处理向量的潜在邻居,并基于b.1的"排除近亲"机制,选择最合适的邻居,同时最合适的邻居也通过同样机制,重新更新自己的邻居。
这是hnsw构建索引之所以相对耗时的地方,因为向量更新需要如下操作:
FOR [待处理向量所在层(或当前最高层), 0层]:
b.3、一方面,尽可能挖掘潜在的邻居候选集(邻居的邻居的邻居的邻居的邻居......最多ef_construction_个)
b.4、然后,按"排除近亲"选出最合适作为邻居(M_个)
b.5、每个新邻居,也要按"排除近亲"重新确认自己的邻居
不过这些机制确保了,每个向量的邻居,不至于很远很离谱 + 但也不全都是很近 + 同时可以log(总向量个数)的找到目标向量。
PS:b.3~b.5,是hnsw索引经常被认为无法实现热增量更新的原因,不过在充分调研源码后,个人认为完全可以实现增量热更新。
hnsw数据增删改机制
锁
hnsw是先天的增量构建,但并非必须一条一条构建,源码配置是最多65536个向量可以并发构建。所以需要一些互斥机制保证索引正常构建,主要包括四类互斥:
增员锁
cur_element_count_guard_增员锁,当新增向量时,用于更新当前向量总数和
增量构建坑位锁
link_list_update_locks_增量构建坑位锁,65536个,如果同时占满,下一个向量无法需等待对应坑位释放。贯穿向量的创建/更新的全过程。
节点邻居表更新锁
link_list_locks_节点邻居表更新锁,每个向量都有一个,用于更新自己的邻居表。由于hnsw的精髓就在于通过向量的新增/更新,不断修正已有邻居向量的邻居以使得更加合理,所以这个锁不仅作用于新增向量本身,而且作用于涉及的邻居节点。
全局锁
global全局锁,这个锁仅在新增向量流程中,且所在层大于当前最大层时。因为涉及更新maxlevel_及相关向量在最新maxlevel_层的邻居配置,所以该锁会阻塞其他新增向量流程。
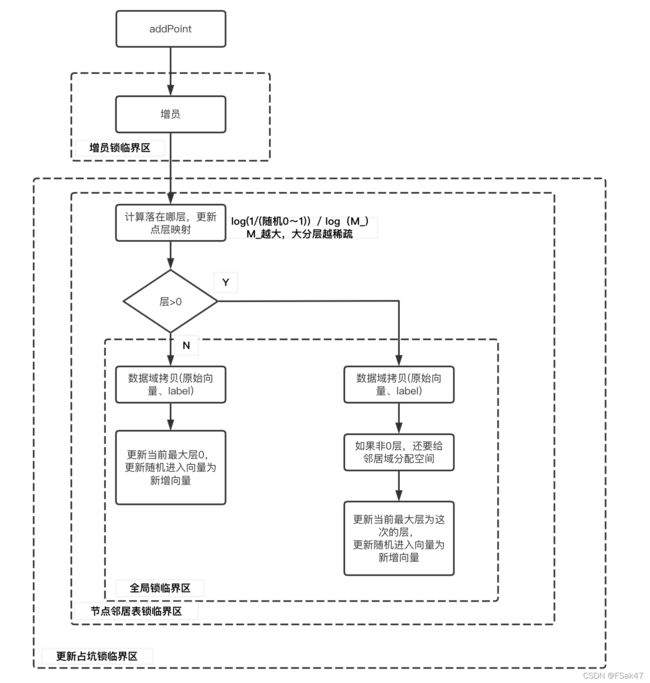
下面以第一个向量的新增过程,简要感受下四个锁的使用:
索引更新机制
和传统正倒排索引一样,hnsw没有物理上的向量删除,而是标记删除,标记删除后的向量,在第0层的header中置flag为1,在邻居的更新(由新增/更新向量触发)、查询会产生相应影响。所以重点关注新增向量和更新向量。
新增向量
上图是第一个向量新增的过程,整体非常简单,因为索引是空的,不需要考虑近邻的更新,下面是第2~n个向量新增的过程:
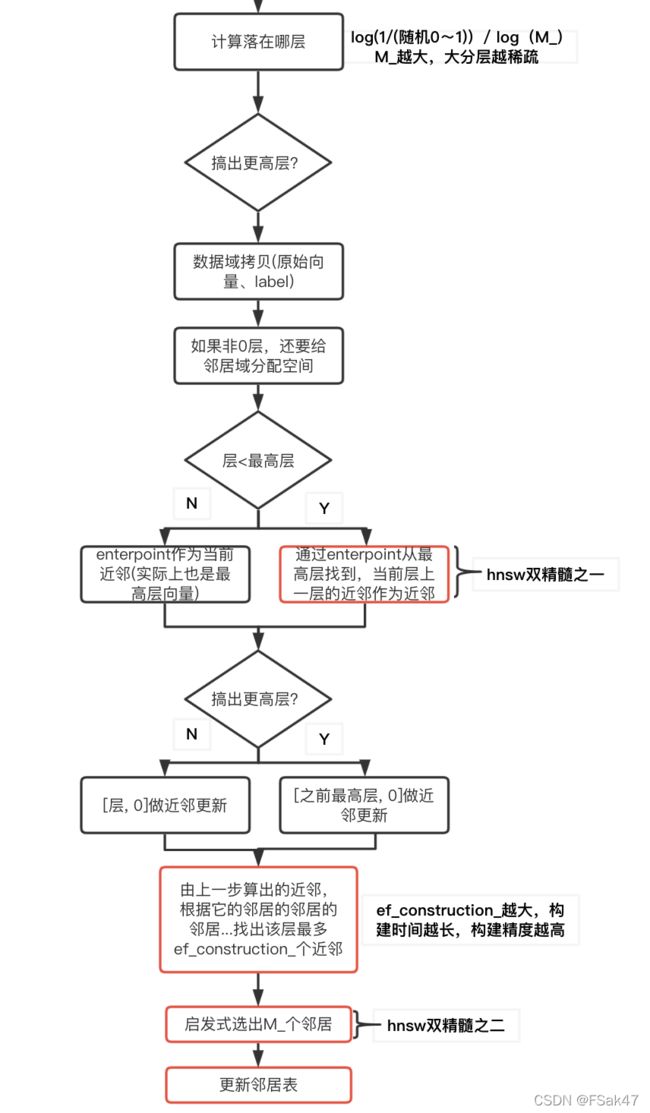
限于尺寸重要细节没有都画在图中,重要环节中红框中体现。
第一个红框:
首先需要弄明白,第一个红框究竟在干什么:它在查找待新增向量,在当前层的最近邻。为什么要找这个?因为要找到当前层,待新增向量,最可能是邻居的潜在邻居集合(也就是第二个红框做的事),然后再挑出合理的邻居(第三个红框做的事)。
层次表如何能做到,从最高层的enterpoint向量,很快的找到待新增向量的潜在近邻?首先以enterpoint作为基准向量,它的邻居中,如果存在离待新增向量更近的,那么就以这个邻居作为基准,再以它的邻居继续去找。本层的全都找遍了,进入下一层接着找,这样绝不会找漏或找错,如下伪代码:
最近邻向量 = enterpoint
最近邻距离 = dist(enterpoint,待新增向量)
for 当前最高层 to 待新增向量所在层上一层 {
bool 找到本层更近邻的 = false
while(1) {
邻居集合 = 最近邻向量.当前层邻居
for (邻居 : 邻居集合) {
if (dist(邻居,待新增向量) < 最近邻距离) {
找到本层更近邻的 = true
最近邻向量 = 邻居
最近邻距离 = dist(邻居,待新增向量)
}
}
if (!找到本层更近邻的) {
break
}
}
}经实验,索引构建初始时,向量比较少尤其高层向量更少,这一步速度非常快。索引构建后期这步速度也很快,这是hnsw层次化找到目标区域的优点。是hnsw双精髓之一。
第二个红框:
上一步找到了待新增向量,在其所在层的当前最近邻向量,这里要做的是,圈出从本层开始到第0层,每一层,待新增向量的潜在邻居。这一步的查找范围也很大,在当前层里,将邻居的邻居的邻居.......,全都过了一遍,伪代码如下:
潜在邻居大顶堆 = {当前层最近邻}
最近邻距离 = 潜在邻居大顶堆.堆顶的dist
while (!潜在邻居大顶堆.empty()) {
if (潜在邻居大顶堆.size >= ef_construction_) {
break
}
最近邻向量 = 潜在邻居大顶堆.top().pop()
邻居集合 = 最近邻向量.邻居
for (邻居 : 邻居集合) {
if (dist(待新增向量,邻居) < 最近邻距离) {
潜在邻居大顶堆.push(邻居)
if (潜在邻居大顶堆 >= ef_construction_) {
潜在邻居大顶堆.pop()
}
最近邻距离 = 潜在邻居大顶堆.堆顶的dist
}
}
}
经试验,这一步耗时相对占比较多。
第三个红框:
上一步选出了最多ef_construction_个潜在邻居,这里要精选出M_个,最终作为待新增向量在本层的邻居。相比NSW的只选最近邻的k个作为邻居,hnsw思路如下伪代码:
最近邻向量 = 候选集.反转小顶堆.堆顶
邻居结果集合 = {}
while (候选集.反转小顶堆) {
if (邻居结果集合.size == M_) {
break
}
待判定邻居 = 候选集.反转小顶堆.top().pop()
bool 选择 = true
dist_to_query = dist(待新增向量, 待判定邻居)
for (邻居 :邻居结果集合) {
if (dist(邻居, 待判定邻居) < dist_to_query) {
选择 = false
break
}
}
if (选择) {
邻居结果集合.push(待判定邻居)
}
}这一步代码跑的非常快,同时取得了非常好的随机化邻居的能力,是hnsw双精髓之二。
第四个红框:
首先给待新增向量,将上一步的之多M_个邻居结果,写入该向量在本层的邻居表。
同时,针对这些邻居,它们也要重新算它们在本层的邻居,伪代码如下:
for (邻居 :邻居结果集合) {
// 这一步在纯新增确实不会发生,但如果是增量更新,就是可能发生的了
bool exist = 待新增向量是否在邻居中已存在
if (!exist) {
邻居表 = 邻居.本层的邻居表
if (邻居表.full()) {
邻居集合 = {所有当前邻居, 待新增向量}
启发式搜索(邻居集合, 邻居表长度)
更新邻居表
} else {
邻居表.append(待新增向量)
}
}
}这一步速度也很快。
更新向量
这里具体指的是,曾经被标记删除的向量,又再次被调用addPoint了(前提是label不变)。hnsw针对向量标记删除,虽然在查询时不会召回,但在所有的邻居更新中,都会带上被标记删除的向量一起做更新,这点和传统正倒排索引一样。通过标记删除减轻删除的成本,同时很重要的是,并不会影响向量检索的质量,因为向量本身还在参与近邻的不断更新,仅有的影响是:在查询时会滤去带有删除标记的结果,可能影响返回向量个数。
除此以外这里的思想、代码逻辑与新增向量,是完全一样的。
查询向量
查询之所以特别快,除了hnsw双精髓的原因以外,还有hnsw的查询是默认"索引没有增量更新"的前提之下的,也就是向量新增/更新时的各类锁机制,在查询时完全没有加锁的。这也是hnsw支持比较完备的增量更新的障碍之一,不过应该完全可以解决。
伪代码如下:
最近邻向量 = enterpoint
最近邻距离 = dist(最近邻向量,待查询向量)
for 当前最高层 to 第1层 {
bool 找到本层更近邻的 = true
while(1) {
找到本层更近邻的 = false
邻居集合 = 最近邻向量.当前层邻居
for (邻居 : 邻居集合) {
if (dist(邻居,待新增向量) < 最近邻距离) {
找到本层更近邻的 = true
最近邻向量 = 邻居
最近邻距离 = dist(邻居,待新增向量)
}
}
if (!找到本层更近邻的) {
break
}
}
}
// 至此找到了直至第1层,待查询向量的最近邻向量,接下来进入第0层找
邻居大顶堆 = {最近邻向量}
最近邻距离 = dist(最近邻向量,待查询向量)
邻居结果集合大顶堆 = {}
while (!邻居大顶堆.empty) {
if (邻居结果集合大顶堆.size == k) {
break
}
待判定邻居 = 邻居大顶堆.top().pop()
for (邻居 :待判定邻居.第0层邻居) {
if (dist(邻居, 待查询向量) < 最近邻距离) {
邻居大顶堆.push(邻居)
if (这个邻居没有标记删除) {
邻居结果集合大顶堆.push(邻居)
}
if (邻居结果集合大顶堆.size > k) {
邻居结果集合大顶堆.pop()
}
最近邻距离 = 邻居结果集合大顶堆.top().dist()
}
}
}hnsw源码分析
faiss和hnsw源码分析实际上已完成,后续将结合增量更新等实践,性能优化手段调研,一起分享出来。
总结
1、hnsw源码在第0层的邻居的确定,依然通过启发式即"排除近亲"的方式选择,而第0层个人认为已经不需要这样去做,这方面将做一些实验去验证;
2、hnsw索引绝对可以保证高的召回率,相对faiss-ivf系索引,在同等近乎100%召回率结果下,hnsw的耗时几乎是ivf-flat的10倍(平均、p99),作为ivf-flat的优化,ivfpq及其变种虽然可以减少耗时,但召回率有下降(因为引入了更多的量化)。所以基本上可以说,基于图的比较优秀的算法如hnsw(及一些演进品),应作为后续我们索引的选择,feed的索引应尽快调整过来。
3、hnsw的索引已经存储了原始向量,且可以获取(经充分调研faiss源码,faiss-ivf系索引,也可以获取原始向量),当前的相似度debug工具,应尽快去掉"id_emb_mapping"文件的构建上传和加载。
4、索引分片不应该是hnsw要考虑的问题
根据hnsw的特点,hnsw确实不易于索引分片,而且鉴于其性能也不应该考虑去做分片,那样只能反而更糟。根据大量文章调研,部分大厂针对数十亿量级的数据,可以做到用类似hnsw的算法,8核+64G内存的单机,就能实现很高的查询性能,结合我们当前的数据量,数据量很长一段时间内,不会是我们的瓶颈。
5、hnsw我们可以考虑研发增量热更新
hnsw的增量更新,不论是新增向量还是更新向量,涉及更新许多向量且是多层邻居表,而查询时完全没有加锁行为(所以它是默认无热更新),这是实现热更新的阻碍。
考虑传统正倒排索引的业界优秀解决方案:如大规模广告系统的索引,在高负载情况下的更新方式其实是:增量构建小索引一同提供查询 + 小索引定容/定时merge合入大索引,这是在大促高流量场景下已验证的成熟方案,hnsw的增量更新面对的问题实际上是一样的,完全可以解决。这将是我们的一大亮点。
PS:经源码调研,faiss-ivf系索引(ivf-flat、ivfpq系列)同样完全可以实现增量,某公司的开源,即是对IVFPQ做了(相对粗糙的)的增量工程化