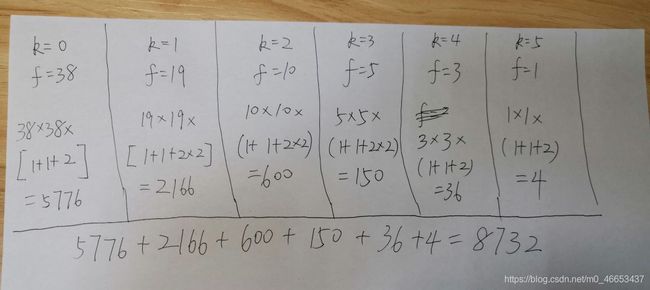
SSD目标检测算法生成8732个先验框
参考链接: 睿智的目标检测23——Pytorch搭建SSD目标检测平台
参考链接: 参考源代码: ssd_layers.py
from __future__ import division
import torch
import torch.nn as nn
import torch.nn.init as init
from torch.autograd import Function
from torch.autograd import Variable
from math import sqrt as sqrt
from itertools import product as product
import numpy as np
from utils.box_utils import decode, nms
from utils.config import Config
class Detect(Function):
def __init__(self, num_classes, bkg_label, top_k, conf_thresh, nms_thresh):
self.num_classes = num_classes
self.background_label = bkg_label
self.top_k = top_k
self.nms_thresh = nms_thresh
if nms_thresh <= 0:
raise ValueError('nms_threshold must be non negative.')
self.conf_thresh = conf_thresh
self.variance = Config['variance']
def forward(self, loc_data, conf_data, prior_data):
loc_data = loc_data.cpu()
conf_data = conf_data.cpu()
num = loc_data.size(0) # batch size
num_priors = prior_data.size(0)
output = torch.zeros(num, self.num_classes, self.top_k, 5)
conf_preds = conf_data.view(num, num_priors,
self.num_classes).transpose(2, 1)
# 对每一张图片进行处理
for i in range(num):
# 对先验框解码获得预测框
decoded_boxes = decode(loc_data[i], prior_data, self.variance)
conf_scores = conf_preds[i].clone()
for cl in range(1, self.num_classes):
# 对每一类进行非极大抑制
c_mask = conf_scores[cl].gt(self.conf_thresh)
scores = conf_scores[cl][c_mask]
if scores.size(0) == 0:
continue
l_mask = c_mask.unsqueeze(1).expand_as(decoded_boxes)
boxes = decoded_boxes[l_mask].view(-1, 4)
# 进行非极大抑制
ids, count = nms(boxes, scores, self.nms_thresh, self.top_k)
output[i, cl, :count] = \
torch.cat((scores[ids[:count]].unsqueeze(1),
boxes[ids[:count]]), 1)
flt = output.contiguous().view(num, -1, 5)
_, idx = flt[:, :, 0].sort(1, descending=True)
_, rank = idx.sort(1)
flt[(rank < self.top_k).unsqueeze(-1).expand_as(flt)].fill_(0)
return output
# Config = {
# 'num_classes': 3, # 'num_classes': 21,
# 'feature_maps': [38, 19, 10, 5, 3, 1],
# 'min_dim': 300,
# 'steps': [8, 16, 32, 64, 100, 300],
# 'min_sizes': [30, 60, 111, 162, 213, 264],
# 'max_sizes': [60, 111, 162, 213, 264, 315],
# 'aspect_ratios': [[2], [2, 3], [2, 3], [2, 3], [2], [2]],
# 'variance': [0.1, 0.2],
# 'clip': True,
# 'name': 'VOC',
# }
class PriorBox(object):
def __init__(self, cfg):
super(PriorBox, self).__init__()
self.image_size = cfg['min_dim'] # 300
self.num_priors = len(cfg['aspect_ratios']) # 6
self.variance = cfg['variance'] or [0.1] # [0.1, 0.2]
self.feature_maps = cfg['feature_maps'] # [38, 19, 10, 5, 3, 1]
self.min_sizes = cfg['min_sizes'] # [30, 60, 111, 162, 213, 264]
self.max_sizes = cfg['max_sizes'] # [60, 111, 162, 213, 264, 315]
self.steps = cfg['steps'] # [8, 16, 32, 64, 100, 300]
self.aspect_ratios = cfg['aspect_ratios'] # [[2], [2, 3], [2, 3], [2, 3], [2], [2]]
self.clip = cfg['clip'] # True
self.version = cfg['name'] # VOC
for v in self.variance:
if v <= 0:
raise ValueError('Variances must be greater than 0')
def forward(self):
mean = []
for k, f in enumerate(self.feature_maps): # [38, 19, 10, 5, 3, 1]
x,y = np.meshgrid(np.arange(f),np.arange(f)) # 笛卡尔坐标形式 38 x 38
x = x.reshape(-1)
y = y.reshape(-1)
for i, j in zip(y,x):
f_k = self.image_size / self.steps[k] # 300 / [8,16,32,64,100,300] 计算每个网格的像素宽度
# 计算网格的中心
cx = (j + 0.5) / f_k # 中心点相对于特征图网格单位的横坐标位置
cy = (i + 0.5) / f_k # 中心点相对于特征图网格单位的纵坐标位置
# 求短边
s_k = self.min_sizes[k]/self.image_size
mean += [cx, cy, s_k, s_k]
# 求长边
s_k_prime = sqrt(s_k * (self.max_sizes[k]/self.image_size))
mean += [cx, cy, s_k_prime, s_k_prime]
# 获得长方形
for ar in self.aspect_ratios[k]: # [[2], [2, 3], [2, 3], [2, 3], [2], [2]]
mean += [cx, cy, s_k*sqrt(ar), s_k/sqrt(ar)] # 获得不同宽高比的先验框
mean += [cx, cy, s_k/sqrt(ar), s_k*sqrt(ar)] # 获得不同宽高比的先验框
# 获得所有的先验框
output = torch.Tensor(mean).view(-1, 4)
if self.clip:
output.clamp_(max=1, min=0)
return output
class L2Norm(nn.Module):
def __init__(self,n_channels, scale):
super(L2Norm,self).__init__()
self.n_channels = n_channels
self.gamma = scale or None
self.eps = 1e-10
self.weight = nn.Parameter(torch.Tensor(self.n_channels)) # 长度是512的权重 torch.Size([512])
self.reset_parameters()
def reset_parameters(self):
init.constant_(self.weight,self.gamma)
def forward(self, x):
norm = x.pow(2).sum(dim=1, keepdim=True).sqrt()+self.eps # torch.Size([4, 1, 38, 38])
#x /= norm
x = torch.div(x,norm) # torch.Size([4, 512, 38, 38])
out = self.weight.unsqueeze(0).unsqueeze(2).unsqueeze(3).expand_as(x) * x
return out # torch.Size([4, 512, 38, 38])