Harris 角点检测算法原理
图像处理之角点检测算法(Harris Corner Detection)
参考地址:http://blog.csdn.net/jia20003/article/details/16908661,本文对其进行一定的理解性的注释的添加。
Harris角点检测是通过数学计算在图像上发现角点特征的一种算法,而且其具有旋转不变性的特质。OpenCV中的Shi-Tomasi角点检测就是基于Harris角点检测改进算法。
基本原理:
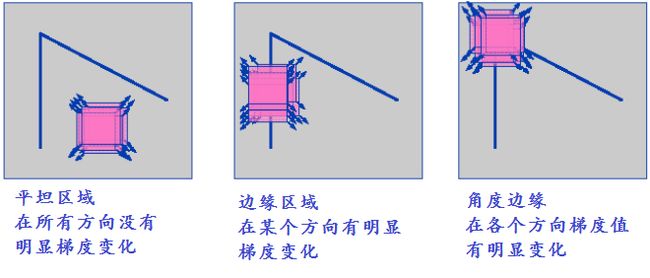
角点是一幅图像上最明显与重要的特征,对于一阶导数而言,角点在各个方向的变化是
最大的,而边缘区域在只是某一方向有明显变化。一个直观的图示如下:
数学原理:
基本数学公式如下:

此处的E(u,v)是一个与图像尺寸一样的的一个矩阵。
其中W(x, y)表示移动窗口,I(x, y)表示x,y处像素灰度值强度,范围为0~255。
每一个像素点处的计算公式为:假设为x,y处
e(x,y)=1/8(沿着(-1,-1),(-1,0),(-1,1),(0,-1),(0,1),(1,-1),(1,0),(1,1)八个方向移动后,窗口各像素相减的平方和)
其中,1/8是八个方向移动的权重。八个方向加在一起,即权重为1.
另一种简化的方式:
E(u,v)根据泰勒级数计算一阶到N阶的偏导数,最终得到一个Harris矩阵公式:
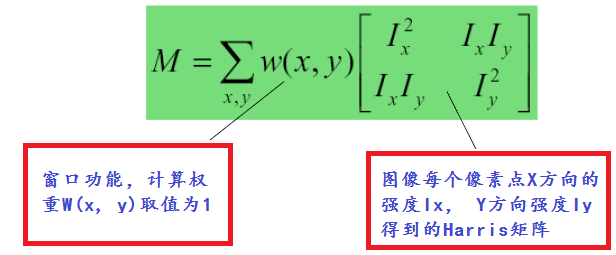
Ix和Iy可以使用函数 cv2.Sobel()计算得到
根据Harris的矩阵计算矩阵特征值 ,然后计算Harris角点响应值:
,然后计算Harris角点响应值:
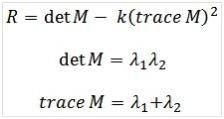
其中K为系数值,通常取值范围为0.04 ~ 0.06之间。
算法详细步骤
第一步:计算图像X方向与Y方向的一阶高斯偏导数Ix与Iy
第二步:根据第一步结果得到Ix^2 , Iy^2与IxIy值
第三步:高斯模糊第二步三个值得到Sxx, Syy, Sxy
第四部:定义每个像素的Harris矩阵,计算出矩阵的两个特质值
第五步:计算出每个像素的R值
第六步:使用3X3或者5X5的窗口,实现非最大值压制
第七步:根据角点检测结果计算,最提取到的关键点以绿色标记,显示在原图上。
Open 中的函数 cv2.cornerHarris(img,blockSize,ksize,k) 可以用来进行角点检测。
参数如下:• img - 数据类型为 float32 的输入图像。• blockSize - 角点检测中要考虑的领域大小。• ksize - Sobel 求导中使用的窗口大小• k - Harris 角点检测方程中的自由参数,取值参数为 [0,04,0.06].
实例代码
import cv2
import numpy as np
filename = 'chessboard.jpg'
img = cv2.imread(filename)
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
gray = np.float32(gray)
# 输入图像必须是 float32,最后一个参数在 0.04 到 0.06 之间
dst = cv2.cornerHarris(gray,2,3,0.04) ##利用该函数计算处的数值为与原图像尺寸一样的矩阵,且单个像素数值变化很大
#result is dilated for marking the corners, not important
dst = cv2.dilate(dst,None) #由于有时候黑白会颠倒,会用到dst = cv2.erode(dst,None),作用是非极大值抑制
# Threshold for an optimal value, it may vary depending on the image.
img[dst>0.01*dst.max()]=[0,0,255] #dst.max()的数值经常为10的7次方大小
cv2.imshow('dst',img)
if cv2.waitKey(0) & 0xff == 27:
cv2.destroyAllWindows()