利用pytorch 实现深度残差网络(deep_residual_neural_network)
利用pytorch 实现深度残差网络
- 深度残差网络
- 代码实现
- 输出结果
深度残差网络
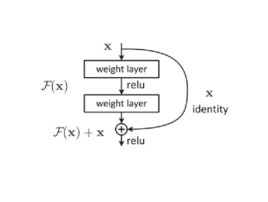
残差网络是由来自Microsoft Research的4位学者提出的卷积神经网络,在2015年的ImageNet大规模视觉识别竞赛(ImageNet Large Scale Visual Recognition Challenge, ILSVRC)中获得了图像分类和物体识别的优胜。 残差网络的特点是容易优化,并且能够通过增加相当的深度来提高准确率。其内部的残差块使用了跳跃连接,缓解了在深度神经网络中增加深度带来的梯度消失问题 。
更加具体的关于此网络结构的内容见原文: 提取码:auiq.
代码实现
import torch
import torch.nn as nn
import torchvision
import torchvision.transforms as transforms
# Device configuration
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# Hyper-parameters
num_epochs = 80
batch_size = 100
learning_rate = 0.001
# Image preprocessing modules
transform = transforms.Compose([
transforms.Pad(4),
transforms.RandomHorizontalFlip(),
transforms.RandomCrop(32),
transforms.ToTensor()])
# CIFAR-10 dataset
train_dataset = torchvision.datasets.CIFAR10(root='G:/pytorch666/data',
train=True,
transform=transform,
download=True)
test_dataset = torchvision.datasets.CIFAR10(root='G:/pytorch666/data',
train=False,
transform=transforms.ToTensor())
# Data loader
train_loader = torch.utils.data.DataLoader(dataset=train_dataset,
batch_size=batch_size,
shuffle=True)
test_loader = torch.utils.data.DataLoader(dataset=test_dataset,
batch_size=batch_size,
shuffle=False)
# 3x3 convolution
def conv3x3(in_channels, out_channels, stride=1):
return nn.Conv2d(in_channels, out_channels, kernel_size=3,
stride=stride, padding=1, bias=False)
# Residual block
class ResidualBlock(nn.Module):
def __init__(self, in_channels, out_channels, stride=1, downsample=None):
super(ResidualBlock, self).__init__()
self.conv1 = conv3x3(in_channels, out_channels, stride)
self.bn1 = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(out_channels, out_channels)
self.bn2 = nn.BatchNorm2d(out_channels)
self.downsample = downsample
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
# ResNet
class ResNet(nn.Module):
def __init__(self, block, layers, num_classes=10):
super(ResNet, self).__init__()
self.in_channels = 16
self.conv = conv3x3(3, 16)
self.bn = nn.BatchNorm2d(16)
self.relu = nn.ReLU(inplace=True)
self.layer1 = self.make_layer(block, 16, layers[0])
self.layer2 = self.make_layer(block, 32, layers[1], 2)
self.layer3 = self.make_layer(block, 64, layers[2], 2)
self.avg_pool = nn.AvgPool2d(8)
self.fc = nn.Linear(64, num_classes)
def make_layer(self, block, out_channels, blocks, stride=1):
downsample = None
if (stride != 1) or (self.in_channels != out_channels):
downsample = nn.Sequential(
conv3x3(self.in_channels, out_channels, stride=stride),
nn.BatchNorm2d(out_channels))
layers = []
layers.append(block(self.in_channels, out_channels, stride, downsample))
self.in_channels = out_channels
for i in range(1, blocks):
layers.append(block(out_channels, out_channels))
return nn.Sequential(*layers)
def forward(self, x):
out = self.conv(x)
out = self.bn(out)
out = self.relu(out)
out = self.layer1(out)
out = self.layer2(out)
out = self.layer3(out)
out = self.avg_pool(out)
out = out.view(out.size(0), -1)
out = self.fc(out)
return out
model = ResNet(ResidualBlock, [2, 2, 2]).to(device)
# Loss and optimizer
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)
# For updating learning rate
def update_lr(optimizer, lr):
for param_group in optimizer.param_groups:
param_group['lr'] = lr
# Train the model
total_step = len(train_loader)
curr_lr = learning_rate
for epoch in range(num_epochs):
for i, (images, labels) in enumerate(train_loader):
images = images.to(device)
labels = labels.to(device)
# Forward pass
outputs = model(images)
loss = criterion(outputs, labels)
# Backward and optimize
optimizer.zero_grad()
loss.backward()
optimizer.step()
if (i + 1) % 100 == 0:
print("Epoch [{}/{}], Step [{}/{}] Loss: {:.4f}"
.format(epoch + 1, num_epochs, i + 1, total_step, loss.item()))
# Decay learning rate
if (epoch + 1) % 20 == 0:
curr_lr /= 3
update_lr(optimizer, curr_lr)
# Test the model
model.eval()
with torch.no_grad():
correct = 0
total = 0
for images, labels in test_loader:
images = images.to(device)
labels = labels.to(device)
outputs = model(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy of the model on the test images: {} %'.format(100 * correct / total))
# Save the model checkpoint
torch.save(model.state_dict(), 'resnet.ckpt')
输出结果
