torch.stack, torch.cat, torch.stack.max/mean/sum维度变换详解
torch.stack,torch.cat, torch.stack.max/mean/sum
- torch.stack
-
- 创建两个[x,x,x,x]tensor变量
- torch.stack([x,x], dim=0)
- torch.stack([x,x], dim=1)
- torch.stack([x,x], dim=2)
- torch.stack([x,x], dim=3)
- torch.stack([x,x], dim=4)
- 简单总结
- torch.cat
-
- torch.cat([x,x], dim=0)
- torch.cat([x,x], dim=1)
- torch.cat([x,x], dim=2)
- torch.cat([x,x], dim=3)
- torch.stack([x, x],dim=x).max(dim)
- torch.stack([x, x],dim=x).mean(dim)
- torch.stack([x, x],dim=x).sum(dim)
学习pytorch时,总免不了遇到stack和cat操作,或者有时候搞不清楚stack后max/mean/sum的操作原理。我通过代码实验为大家解说一些这些操作的原理。
torch.stack
torch.stack说白了原理也是来自于numpy.satck的操作。
主要接受两个参数:
一个数组(包含了具有相同维度的tensor元素);
一个维度(制定了堆叠的维度位置)
一般因为我们深度学习中一般都是会用到四个维度信息,所以在这里我们也以创建具有四个维度信息的tensor变量来做说明。
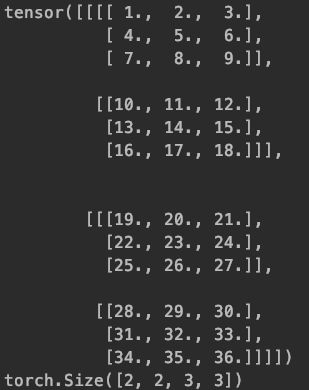
创建两个[x,x,x,x]tensor变量
import torch
a = torch.FloatTensor([[[[1,2,3],[4,5,6],[7,8,9]],[[10,11,12],[13,14,15],[16,17,18]]]])
b = torch.FloatTensor([[[[19,20,21], [22,23,24],[25,26,27]],[[28,29,30],[31,32,33],[34,35,36]]]])
print(a, b, a.data.shape, b.data.shape, sep='\n')
shape信息都是[1, 2, 3, 3]

torch.stack([x,x], dim=0)
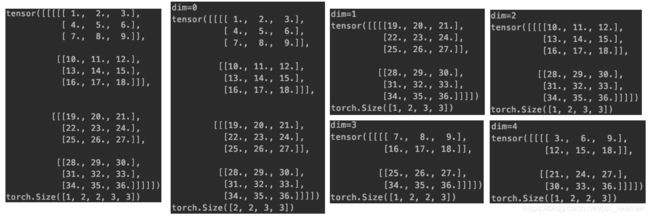
对于四维信息,可以指定dim=0-4共五个维度进行堆叠。
c=torch.stack([a,b], dim=0)
print(c, c.data.shape, sep='\n')
shape信息变为[2, 1, 2, 3, 3]
在堆叠之后的tensor第一个维度将两个tensor(a和b)堆叠
其实就是相当于直接:
c=[a, b], shape为[2, 1, 2, 3, 3],如此改变了第一个维度信息,即dim=0;

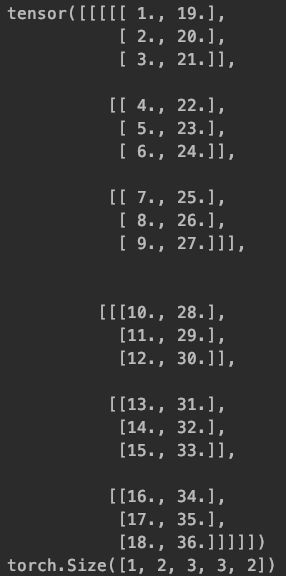
torch.stack([x,x], dim=1)
c=torch.stack([a,b], dim=1)
print(c, c.data.shape, sep='\n')
shape信息变为[1, 2, 2, 3, 3]
在堆叠之后的tensor第二个维度将两个tensor(a和b)堆叠
其实就是相当于:
a=(a去掉最外侧维度信息),就是变为[2,3,3]
b=(b去掉最外侧维度信息),就是变为[2,3,3]
c=[a,b], shape为[2, 2, 3, 3],如此改变了第二个维度信息,即dim=1;
c=[c]=[[a,b]], shape为[1, 2, 2, 3, 3],恢复dim=0时的1维度信息;

torch.stack([x,x], dim=2)
c=torch.stack([a,b], dim=2)
print(c, c.data.shape, sep='\n')
shape信息变为[1, 2, 2, 3, 3]
在堆叠之后的tensor第三个维度将两个tensor(a和b)堆叠
其实就是相当于:
a=(a去掉外侧维度信息),就是变为两个tensor, a1=[3,3], a2=[3,3];
b=(b去掉外侧维度信息),就是变为两个tensor, b1=[3,3], b2=[3,3];
c1=[a1,b1], 如此改变了第三个维度信息,shape为[2, 3, 3], 即dim=2
c2=[a2,b2], 如此改变了第三个维度信息,shape为[2, 3, 3], 即dim=2
c=[c1, c2], shape为[2, 2, 3, 3]. 恢复dim=1时的2维度信息。
c=[c]=[[c1,c2]], shape为[1, 2, 2, 3, 3].恢复dim=0时的1维度信息。

torch.stack([x,x], dim=3)
c=torch.stack([a,b], dim=3)
print(c, c.data.shape, sep='\n')
shape信息变为[1, 2, 2, 3, 3]
在堆叠之后的tensor第四个维度将两个tensor(a和b)堆叠
其实就是相当于:
a=(a去掉外侧维度信息),就是变为六个tensor:
a1=[3], a2=[3],a3=[3], a4=[3],a5=[3], a6=[3];
b=(b去掉外侧维度信息),就是变为六个tensor:
b1=[3], b2=[3],b3=[3], b4=[3],b5=[3], b6=[3];
c1=[a1,b1], 如此改变了第四个维度信息,shape为[2, 3], 即dim=3
c2=[a2,b2], 如此改变了第四个维度信息,shape为[2, 3], 即dim=3
c3=[a3,b3], 如此改变了第四个维度信息,shape为[2, 3], 即dim=3
c4=[a4,b4], 如此改变了第四个维度信息,shape为[2, 3], 即dim=3
c5=[a5,b5], 如此改变了第四个维度信息,shape为[2, 3], 即dim=3
c6=[a6,b6], 如此改变了第四个维度信息,shape为[2, 3], 即dim=3
c1=[c1,c2,c3] , shape 为[3, 2, 3]. 恢复dim=2时的3维度信息;
c2=[c4,c5,c6], shape 为[3, 2, 3]. 恢复dim=2时的3维度信息;
c=[c1, c2], shape为[2, 2, 3, 3]. 恢复dim=1时的2维度信息;
c=[c]=[[c1,c2]], shape为[1, 2, 2, 3, 3]. 恢复dim=0时的1维度信息;

torch.stack([x,x], dim=4)
c=torch.stack([a,b], dim=4)
print(c, c.data.shape, sep='\n')
shape信息变为[1, 2, 2, 3, 3]
在堆叠之后的tensor第五个维度将两个tensor(a和b)堆叠
其实就是相当于:
a=(a去掉外侧维度信息),就是变为18个值:
a1=1, a2=2,a3=3, a4=4,a5=5, a6=6…;
b=(b去掉外侧维度信息),就是变为18个值:
b1=19, b2=20,b3=21, b4=22,b5=23, b6=24…;
c1=[a1,b1], 如此改变了第 五个维度信息,shape为[2], 即dim=4
c2=[a2,b2], 如此改变了第五个维度信息,shape为[2], 即dim=4
c3=[a3,b3], 如此改变了第五个维度信息,shape为[2], 即dim=4
c4=[a4,b4], 如此改变了第五个维度信息,shape为[2], 即dim=4
c5=[a5,b5], 如此改变了第五个维度信息,shape为[2], 即dim=4
c6=[a6,b6], 如此改变了第五个维度信息,shape为[2], 即dim=4
…
c1=[c1,c2,c3] , shape 为[3, 2]. 恢复dim=3时的3维度信息;
c2=[c4,c5,c6], shape 为[3, 2]. 恢复dim=3时的3维度信息;
c3=[c7,c8,c9] , shape 为[3, 2]. 恢复dim=3时的3维度信息;
c4=[c10,c11,c12], shape 为[3, 2]. 恢复dim=3时的3维度信息;
c5=[c13,c14,c15] , shape 为[3, 2]. 恢复dim=3时的3维度信息;
c6=[c16,c17,c18], shape 为[3, 2]. 恢复dim=3时的3维度信息;
…
c1=[c1, c2, c3],shape 为[2, 3, 2]. 恢复dim=2时的3维度信息;
c2= [c4, c5, c6],shape 为[2, 3, 2]. 恢复dim=2时的3维度信息;
c=[c1, c2 ], shape为[2, 3, 3, 2]. 恢复dim=1时的2维度信息;
c=[c]=[[c1,c2]], shape为[1, 2, 2, 3, 3]. 恢复dim=0时的1维度信息;
简单总结
就是stack操作是将tensor先拆解到指定的维度上,再该维度上进行堆叠,然后逐渐恢复之前的维度信息。
torch.cat
对于四维信息,可以指定dim=0-3共四个维度进行concat。
c = torch.cat([a, b],dim=0) #两个的每一列加在一起
print(c, c.data.shape, sep='\n')
c = torch.cat([a, b],dim=1) #两个的每一列加在一起
print(c, c.data.shape, sep='\n')
c = torch.cat([a, b],dim=2) #两个的每一列加在一起
print(c, c.data.shape, sep='\n')
c = torch.cat([a, b],dim=3) #两个的每一列加在一起
print(c, c.data.shape, sep='\n')
原理和stack感觉差不多,只不过stack是堆叠出一个新的维度信息,由4个维度变为五个维度,而cat是四个维度依然是四个维度,只不过制定维度位置上的channels直接进行了翻倍或者多倍。
torch.cat([x,x], dim=0)
shape信息变为[2, 2, 3, 3]
其实就是相当于直接:
a=[2,3,3]
b=[2,3,3]
c=[a, b], shape为[2, 2, 3, 3],如此翻倍了第一个维度信息,即dim=0;
torch.cat([x,x], dim=1)
shape信息变为[1, 4, 3, 3]
其实就是相当于直接:
a1=[3,3],a2=[3,3]
b1=[3,3],b2=[3,3],
c=[a1,a2,a3,a4], shape为[4, 3, 3],如此翻倍了第二个维度信息,即dim=1;
c=[c], 恢复第一个维度信息1,shape为[1, 4, 3, 3]

torch.cat([x,x], dim=2)
shape信息变为[1, 2, 6, 3]
其实就是相当于直接:
a=(a去掉外侧维度信息),就是变为六个tensor:
a1=[3], a2=[3],a3=[3], a4=[3],a5=[3], a6=[3];
b=(b去掉外侧维度信息),就是变为六个tensor:
b1=[3], b2=[3],b3=[3], b4=[3],b5=[3], b6=[3];
c1=[a1,a2,a3,b1,b2,b3], shape为[6, 3],如此翻倍了第三个维度信息,即dim=2;
c2=[a4,a5,a6,b4,b5,b6], shape为[6, 3],如此翻倍了第三个维度信息,即dim=2;
c=[c1,c2], 恢复第二个维度信息2,shape为[2, 6, 3]
c=[c], 恢复第一个维度信息1,shape为[1, 2, 6, 3]

torch.cat([x,x], dim=3)
a=(a去掉外侧维度信息),就是变为18个值:
a1=1, a2=2,a3=3, a4=4,a5=5, a6=6…;
b=(b去掉外侧维度信息),就是变为18个值:
b1=19, b2=20,b3=21, b4=22,b5=23, b6=24…;
然后先将a1,a2,a3,b1,b2,b3放入一个[],翻倍了维度,
如此进行,一共将6个[]进行了翻倍,shape为[6]
再将前三个放入[], 恢复第3个维度信息, shape为[3, 6]
再将得到的两个[]放入[], 恢复第2个维度信息, shape为[2, 3, 6]
再将得到的一个[]放入[], 恢复第1个维度信息, shape为[1, 2, 3, 6]

torch.stack([x, x],dim=x).max(dim)
max中的dim也可以指定dim。
我们以torch.stack([a, b],dim=1).max(dim) 来解说一下操作。
同样对于max,其中的维度可以指定五个(对于四个维度信息来说)
c,_=torch.stack([a,b], dim=1).max(0)
print('dim=0 ', c, c.data.shape, sep='\n')
c,_=torch.stack([a,b], dim=1).max(1)
print('dim=1 ', c, c.data.shape, sep='\n')
c,_=torch.stack([a,b], dim=1).max(2)
print('dim=2 ', c, c.data.shape, sep='\n')
c,_=torch.stack([a,b], dim=1).max(3)
print('dim=3 ', c, c.data.shape, sep='\n')
c,_=torch.stack([a,b], dim=1).max(4)
print('dim=4 ', c, c.data.shape, sep='\n')
其实就是在相应的维度上找最大值,然后维度信息会恢复到堆叠前的维度信息。
torch.stack([x, x],dim=x).mean(dim)
mean中的dim也可以指定dim。
我们以torch.stack([a, b],dim=1).mean(dim=1) 来解说一下操作。
同样对于mean,其中的维度可以指定五个(对于四个维度信息来说)
c=torch.stack([a,b], dim=1).mean(1)
print('dim=1 ', c, c.data.shape, sep='\n')
其实就是在相应的维度上进行element-wise加和,再取average,然后维度信息会恢复到堆叠前的维度信息。

torch.stack([x, x],dim=x).sum(dim)
sum中的dim也可以指定dim。
我们以torch.stack([a, b],dim=1).sum(dim=1) 来解说一下操作。
同样对于sum,其中的维度可以指定五个(对于四个维度信息来说)
c=torch.stack([a,b], dim=1).sum(1)
print('dim=1 ', c, c.data.shape, sep='\n')
其实就是在相应的维度上进行element-wise加和,不再取average,然后维度信息会恢复到堆叠前的维度信息。

2020.03.25