m基于16QAM的自适应波束形成matlab仿真(包括matlab仿真录像)
目录
1.源码获取方式
2.算法描述
3.部分程序
4.部分仿真图预览
1.源码获取方式
使用版本matlab2022a
获取方式1:
点击下载链接(解压密码C+123456):
m基于16QAM的自适应波束形成matlab仿真
获取方式2:
如果下载链接失效,加博主微信联系,或私信联系。
2.算法描述
16QAM全称正交幅度调制是英文Quadrature Amplitude Modulation的缩略语简称,意思是正交幅度调制,是一种数字调制方式。产生的方法有正交调幅法和复合相移法。
波束形成是阵列信号处理中非常重要的任务,基本处理过程为:
1.采用空间分布的传感器阵列采集场数据
2.对所采集的阵列数据进行线性加权组合处理得到一个标量波束输出。
自适应阵列天线具有抗干扰的作用,他的基本原理是利用算法,在保证信号大增益接收的前提下,自适应的使天线的方向图零陷对准干扰方向,从而抑制干扰或者降低干扰信号的强度,使有用接收信号的增益最大,干扰的增益最小。自适应波束形成通过不同的准则确定自适应加权,主要准则有:1.MSE(最小均方误差)2.SNR(最大信噪比)3.LH(最大似然比)
这些准则都是采用一定的算法,调整波束方向图,从而实现自适应控制。
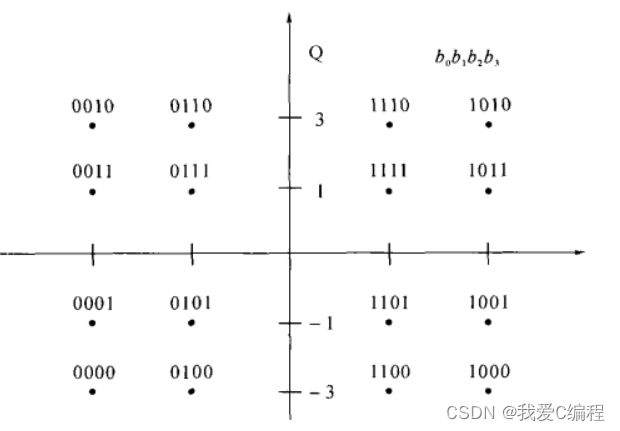
QAM调制中,数据信号由相互正交的两个载波的幅度变化表示。QAM是一种矢量调制,将输入比特先映射(一般采用格雷码)到一个复平面(星座)上,形成复数调制符号,然后将该符号的I、Q分量(即该复数的实部和虚部)采用幅度调制,分别对应调制在相互正交(时域正交)的两个载波coswt和sinwt上。
正交振幅调制可以表示为:

式中:两个相互正交的载波分量中,每个载波被一组离散的振幅{Am}、{Bm}所调制,故称这种方式为正交振幅调制;Ts是码元宽度,m=1、2、...、M,M为Am和Bm的电平数。振幅Am和Bm可以表示成:
式中:A是固定振幅,dm、em由输入信号确定。dm、em决定已调QAM信号在星座图中的坐标点。QAM是幅度、相位联合调制的技术,它同时利用载波的幅度和相位来传递信息比特,因此在最小距离相同的条件下可实现更高的频带利用率。
根据802.11a规定,16QAM编码表如表4-14所示。经过表4-14映射后得到的I/Q数据再乘上1/sqrt(10)进行归一化,即得到调制后的I/Q值。I/Q数据分别进行A/D变换,得到两路模拟电平信号,用于和coswt、-sinwt相乘,从而实现调制。
3.部分程序
for SNR = SNR_set;
N0 = 1/(10^(SNR/10));
delta2 = N0;
deltab = 0.5;
error_count = 0;
bit_count = 0;
index = 0;
ERR_NUM = [];
tmps = 0;
while error_count < 1000
index = index+1;
for kk=1:nTx
bits(kk,:) = round(rand(1,frame_length));
symbols(kk,:) = qammod(bits(kk,:),16);
end
%transmit signal
s = symbols;
u = reshape(s,nTx,nRx,length(s)/nRx);
%Channel
h = 1/sqrt(2)*[randn(nRx,nTx,length(s)/nRx) + j*randn(nRx,nTx,length(s)/nRx)];
for ij = 1:nTx
p(:,ij,:) = h(:,ij,:).*exp(j*alpha(ij)*pi/180);
end
%mmse beamforming
LMS = zeros(1,length(s)/nRx);
for i=1:length(s)/nRx
for ii = 1:length(SIR)
u2(:,ii) = u(:,ii,i)*10^(SIR(ii)/20);
end
XN(:,:,i) = awgn(u2,SNR,'measured');
%定义接收信号
w(:,:,i) = inv(p(:,:,i)*p(:,:,i)'+2*delta2/deltab*eye(nRx))*p(:,1,i);
WK = w(:,:,i)'*p(:,:,i);
WK2 = WK/max(abs(WK));
yhat(:,:,i) = WK2*XN(:,:,i);
R1 = real(yhat(:,:,i));
I1 = imag(yhat(:,:,i));
s_hat(:,:,i)= qamdemod(R1+sqrt(-1)*I1,16);
end
s_hat1 = squeeze(s_hat);
recovered_bits = reshape(s_hat1,1,length(s));
ERR_NUM = sum(recovered_bits ~= bits(1,:));
if index <= 50
tmps = tmps + ERR_NUM;
else
if ERR_NUM/(tmps/50) < 10
SNR
error_count
error_count = error_count + ERR_NUM;
bit_count = bit_count + frame_length;
end
end
end
%Calculate the BER
BER = error_count/bit_count;
Bers = [Bers,BER];
end
4.部分仿真图预览
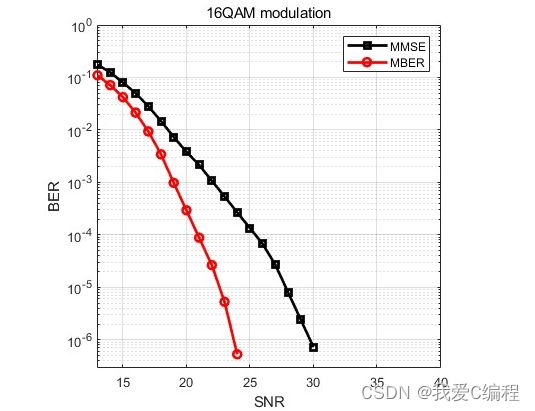
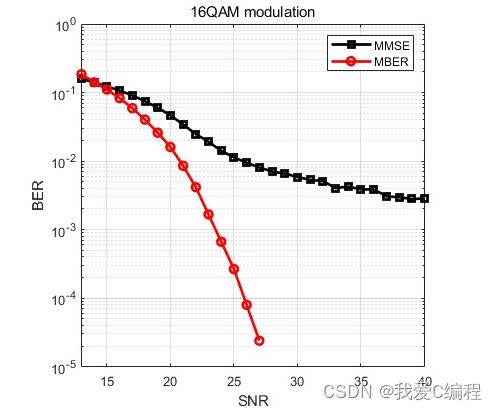
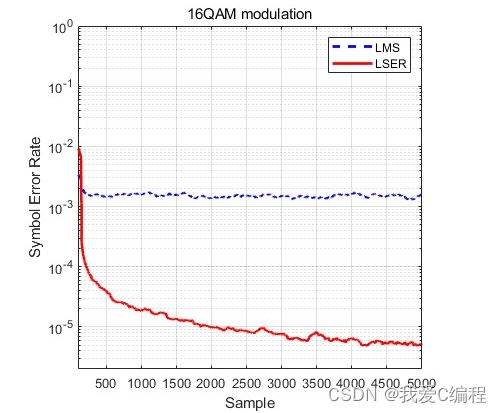
01_104m