Linux学习日记17——信号
学习视频链接
黑马程序员-Linux系统编程_哔哩哔哩_bilibili https://www.bilibili.com/video/BV1KE411q7ee?p=129
https://www.bilibili.com/video/BV1KE411q7ee?p=129
目录
一、信号的概念
1.1 信号共性
1.2 信号的机制
1.3 与信号相关的事件和状态
1.4 信号的编号
1.5 信号四要素
二、kill函数/命令产生信号
2.1 kill产生命令
2.2 kill函数
2.3 进程组:
2.4 权限保护:
2.5 其他几个发送信号的函数
三、alarm 和 setitimer 函数
3.1 alarm函数
3.2 setitimer函数
四、信号集操作函数
4.1 信号集操作函数
4.2 设置信号屏蔽字和解除屏蔽
4.3 查看未决信号集
4.4 操作流程
五、信号捕捉
5.1 signal函数
5.2 sigaction函数
5.3 内核实现信号捕捉过程
六、SIGCHLD信号
6.1 SIGCHLD的产生条件
6.2 借助SIGCHLD信号回收子进程
七、中断系统调用
7.1 系统调用分类
7.2 结合 pause 回顾慢速系统调用
一、信号的概念
1.1 信号共性
简单、不能携带大量信息、满足条件才能发送
1.2 信号的机制
1、A 给 B 发送信号,B 收到信号之前执行自己的代码,收到信号后,不管执行到程序的什么位置,都要暂停运行,去处理信号,处理完毕再继续执行。与硬件中断类似 —— 异步模式。但信号是软件层面上实现的中断,早期常被称为 “软中断”。
2、信号的特质:
由于信号是通过软件方法实现,其实现手段导致信号有很强的延时性。但对于用户来说,这个延
迟时间非常短,不易察觉。
3、每个进程收到的所有信号,都是由内核负责发送的,内核处理。
1.3 与信号相关的事件和状态
1、产生信号:
(1) 按键产生,如:Ctrl + c、 Ctrl + z、 Ctrl + \
【Ctrl + c、Ctrl + \ 都能终止程序,但是发送的信号不同。Ctrl + z 暂停进程,通过输入 fg 指令可以让他继续执行】
(2) 系统调用产生,如:kill、 raise、 aborte
(3) 软件条件产生,如:定时器 alarm
(4) 硬件异常产生,如:非法访问内存(段错误)、除 0(浮点数例外)、内存对齐出错(总线错误)
(5) 命令产生,如:kill 命令
2、递达:
递送并且到达进程
3、未决:
产生和递达之间的状态。主要由于阻塞(屏蔽)导致该状态
4、信号的处理方式
(1) 执行默认动作
(2) 忽略(丢弃)
(3) 捕捉(调用户处理函数)
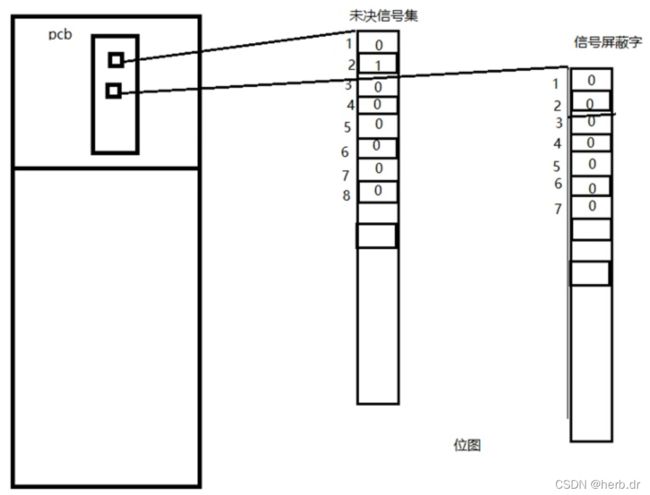
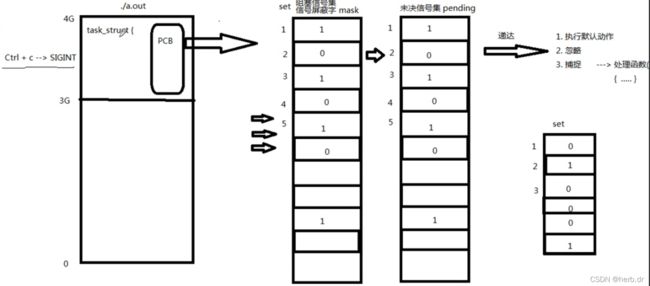
5、Linux 内核的进程控制块 PCB 是一个结构体,task struct,除了包含进程 id,状态,工作目录,用户id,组id,文件描述符表,还包含了信号相关的信息,主要指阻塞信号集和未决信号集
6、阻塞信号集(信号屏蔽字):
将某些信号加入集合,对他们设置屏蔽,当屏蔽 x 信号后,再收到该信号,该信号的处理将推后(解除屏蔽后)
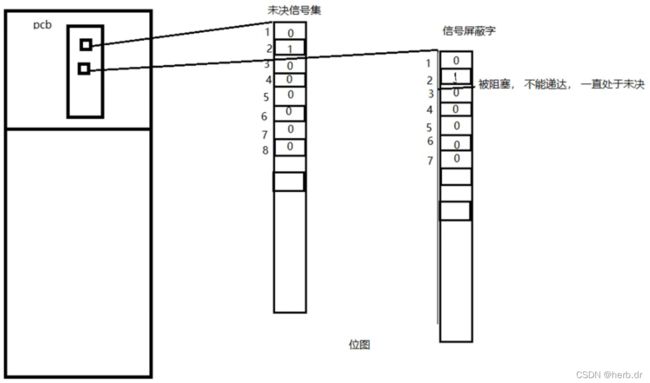
7、未决信号集:
(1) 信号产生,未决信号集中描述该信号的位立刻翻转为 1,表信号处于未决状态。当信号被处理对应位翻转回为 0。这一时刻往往非常短暂
(2) 信号产生后由于某些原因(主要是阻塞)不能抵达。这类信号的集合称之为未决信号集。在屏蔽解除前,信号一直处于未决状态
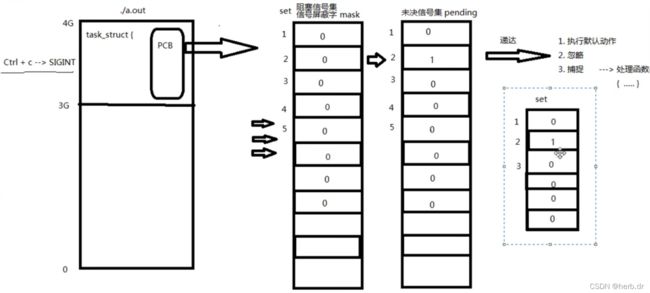
8、图示
下面图中未决信号集有一个中断信号将要被执行,信号被处理后变为 0
下面图中未决信号集有一个中断信号将要被执行,但是信号屏蔽字将这个信号屏蔽了,一直处理不了
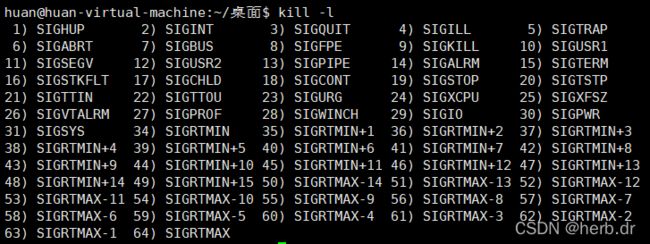
1.4 信号的编号
常规信号为前 31 个,都有默认事件和处理动作
实时信号没有默认动作
1.5 信号四要素
1、编号 2、名称 3、事件 4、默认处理动作
通过 man 7 signal 查看
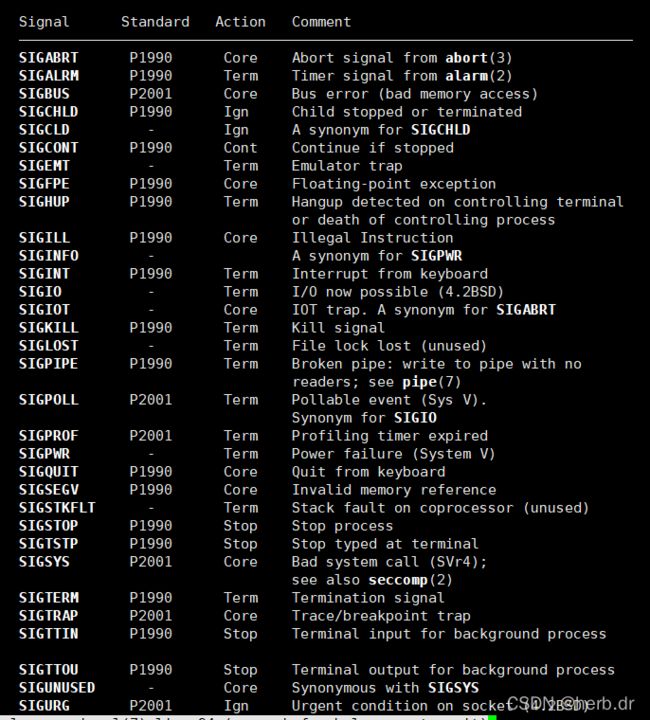
kill 进程id 默认使用信号量为 15 的信号杀死进程
(1) SIGHUP:当用户退出 shell 时,由该 shell 启动的所有进程将收到这个信号,默认动作为终止进程
(2) SIGINT:挡用户按下了
(3) SIGQUIT:当用户按下
(4) SIGILL:CPU 检测到某进程执行了非法指令。默认动作为终止进程并产生 core 文件
(5) SIGTRAP:该信号由断点指令或其他 trap 指令产生。默认动作为终止里程并产生 core 文件
(6) SIGABRT:调用 abort 函数时产生该信号。默认动作为终止进程并产生 core 文件
(7) SIGBUS:非法访问内存地址,包括内存对齐出错,默认动作为终止进程并产生 core 文件
(8) SIGFPE:在发生致命的运算错误时发出。不仅包括浮点运算错误,还包括溢出及除数为 0 等所有的算法错误。默认动作为终止进程并产生 core 文件
(9) SIGKILL:无条件终止进程。本信号不能被忽略,处理和阻塞。默认动作为终止进程。它向系统管理员提供了可以杀死任何进程的方法
(10) SIGUSR1:用户定义的信号。即程序员可以在程序中定义并使用该信号。默认动作为终止进程
(11) SIGSEGV:指示进程进行了无效内存访问。默认动作为终止进程并产生 core 文件
(12) SIGUSR2:另外一个用户自定义信号,程序员可以在程序中定义并使用该信号。默认动作为终止进程
(13) SIGPIPE:Broken pipe 向一个没有读端的管道写数据。默认动作为终止进程
(14) SIGALRM:定时器超时,超时的时间由系统调用 alarm 设置。默认动作为终止进程
(15) SIGTERM:程序结束信号,与 SIGKILL 不同的是,该信号可以被阳塞和终止。通常用来要示程序正常退出。执行 shell 命令 Kill 时,缺省产生这个信号。默认动作为终止进程
(16) SIGSTKFLT:Linux 早期版本出现的信号,现仍保留向后兼容。默认动作为终止进程
(17) SIGCHLD:子进程状态发生变化时,父进程会收到这个信号。默认动作为忽略这个信号
(18) SIGCONT:如果进程已停止,则使其继续运行。默认动作为继续 / 忽略
(19) SIGSTOP:停止进程的执行。信号不能被忽略,处理和阻塞。默认动作为暂停进程
(20) SIGTSTP:停止终端交互进程的运行。按下
(21) SIGTTIN:后台进程读终端控制台。默认动作为暂停进程
(22) SIGTTOU:该信号类似于 SIGTTIN,在后台进程要向终端输出数据时发生。默认动作为暂停进程
(23) SIGURG:套接字上有紧急数据时,向当前正在运行的进程发出些信号,报告有紧急数据到达。如网络带处数据到达,默认动作为忽略该信号
(24) SIGXCPU:进程执行时问超过了分配给该进程的CPU时间,系统产生该信号并发送给该进程。默认动作为终止进程
(25) SIGXFSZ:超过文件的最大长度设置。默认动作为终止进程
(26) SIGVTALRM:虚拟时钟超时时产生该信号。类似于 SIGALRM,但是该信号只计算该进程占用 CPU 的使用时间。默认动作为终止进程
(27) SGIPROF:类似于 SIGVTALRM,它不公包括该进程占用 CPU 时间还包括执行系统调用时间。默认动作为终止进程
(28) SIGWINCH:窗口变化大小时发出。默认动作为忽略该信号
(29) SIGIO:此信号向进程指示发出了一个异步 IO 事件。默认动作为忽略
(30) SIGPWR:关机。默认动作为终止进程
(31) SIGSYS:无效的系统调用。默认动作为终止进程井产生 core 文件
(34) SIGRTMIN ~ (64) SIGRTMAX:LINUX 的实时信号,它们没有固定的含义(可以由用户自定义)。所有的实时信号的默认动作都为终止进程
二、kill函数/命令产生信号
2.1 kill产生命令
1、kill 命令产生信号:kill -SIGKILL pid
kill -SIGKILL -1 杀死所有的进程,电脑重启
2.2 kill函数
1、kill 函数:给指定进程发送指定信号(不一定杀死)
int kll(pid_t pid, int sig); 成功:0;失败: -1 (ID 非法,信号非法,普通用户杀 init 进程等权级问题),设置 errno
sig:不推荐直接使用数字,应使用宏名,因为不同操作系统信号编号可能不同,但名称一致
pid>0:发送信号给指定的进程
pid=0:发送信号给与调用 kill 函数进程属于同一进程组的所有进程
pid<0:取 |pid| 发给对应进程组
pid=-1:发送给进程有权限发送的系统中所有进程
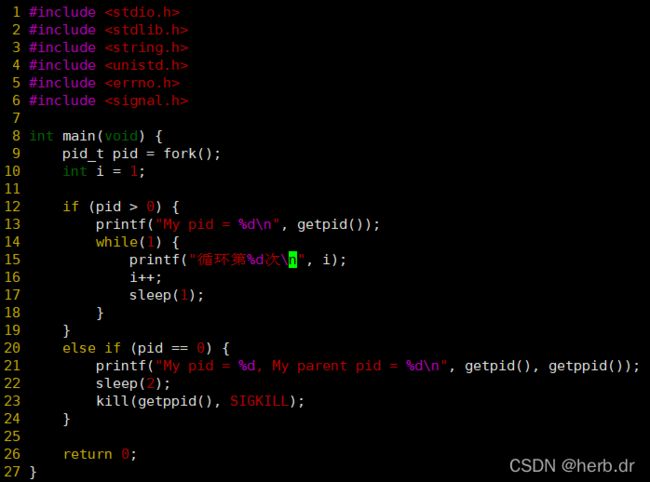

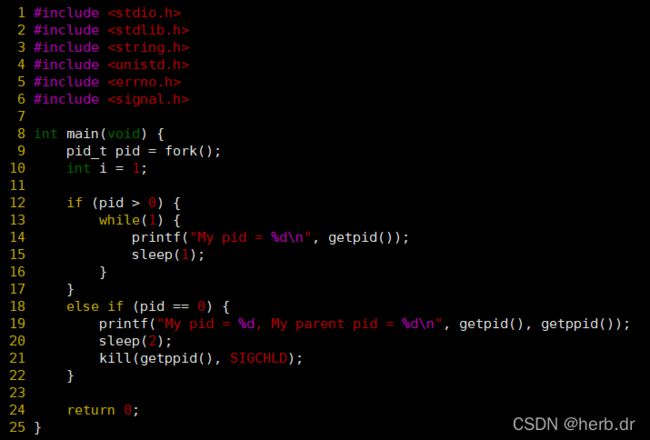
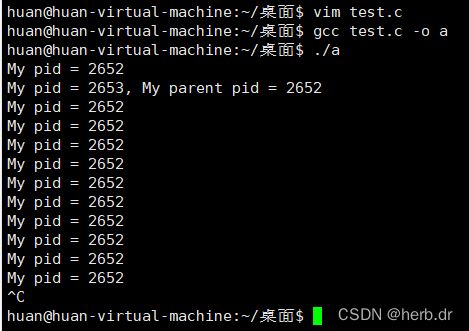
还可以使用其他的信号杀死进程
2.3 进程组:
每个进程都属于一个进程组,进程组是一个或多个进程集合,他们相互关联,共同完成-一个实体任务,每个进程组都有一个进程组长,默认进程组ID与进程组长ID相同
2.4 权限保护:
super 用户 (root) 可以发送信号给任意用户,普通用户是不能向系统用户发送信号的。kill -9 (root 用户的 pid) 是不可以的。同样,普通用户也不能向其他普通用户发送信号,终止其进程。只能向自己创建的进程发送信号。普通用户基本规则是:发送者实际或有效用户 ID == 接收者实际或有效用户 ID
2.5 其他几个发送信号的函数
int raise(int sig);
void abort(void);
三、alarm 和 setitimer 函数
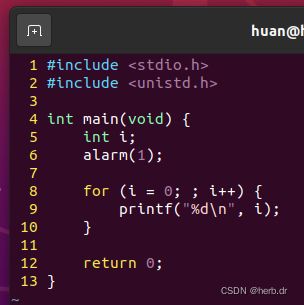
3.1 alarm函数
1、作用
设置定时器(闹钟)。在指定 seconds 后,内核会给当前进程发送 (14) SIGALRM 信号。进程收到该信号,默认动作终止
每个进程都有且只有唯一个定时器
2、unsigned int alarm(unsigned int seconds);
返回 0 或剩余的秒数,无失败
3、常用:
取消定时器 alarm(0),返回旧闹钟余下秒数
4、案例: alarm(5)→3sec→alarm(4) →5sec →alarm(5) →alarm(0)
调用 alarm(4) 返回 2,调用 alarm(5) 返回 0,调用 alarm(0) 返回 5
5、注意
定时,与进程状态无关(自然定时法)!就绪、运行、挂起(阻塞、暂停)、终止、僵尸... 无论进程处于何种状态,alarm 都计时
6、案例:一秒钟 for 循环的次数
(1) 基础版本
(2) 运行时候加上查看时间的内容
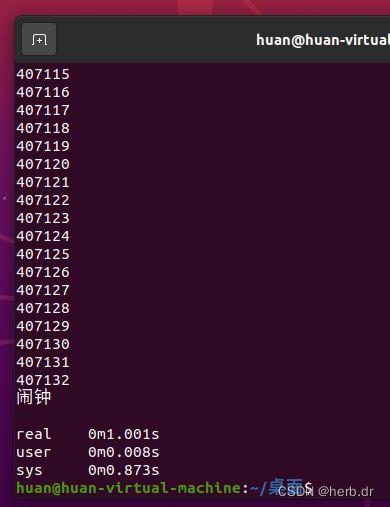
在用户空间(用户态)运行了 0.008 秒,再系统空间(核心态)运行了 0.873 秒
实际执行时间 = 系统时间 + 用户时间 + 等待时间
(3) 运行的内容写入文件
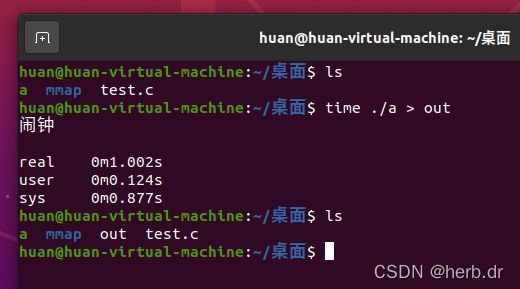
得出结论:优化 IO 能显著提高程序运行效率
3.2 setitimer函数
1、作用
设置定时器(闹钟)
可代替 alarm 函数。精度微秒 us,可以实现周期定时
2、int setitimer(int which, const struct itimerval *new_value, struct itimerval *old_value);
成功:0; 失败:-1,设置 errno
参数:
(1) which: 指定定时方式。
① 自然定时:ITIMER_REAL → (14) SIGLARM 计算自然时间(传入这个参数和上面的 alarm 函数的效果就是一样的)
② 虚拟空间计时(用户空间):ITIMER_VIRTUAL → (26) SIGVTALRM 只计算进程占用 cpu 的时间
③ 运行时计时(用户 + 内核):ITIMER_PROF → (27) SIGPROF 计算占用 cpu 及执行系统调用的时间
(2) new_value:定时秒数
(3) old_value:传出参数,上次定时剩余时间
(4) struct itimerval 结构体
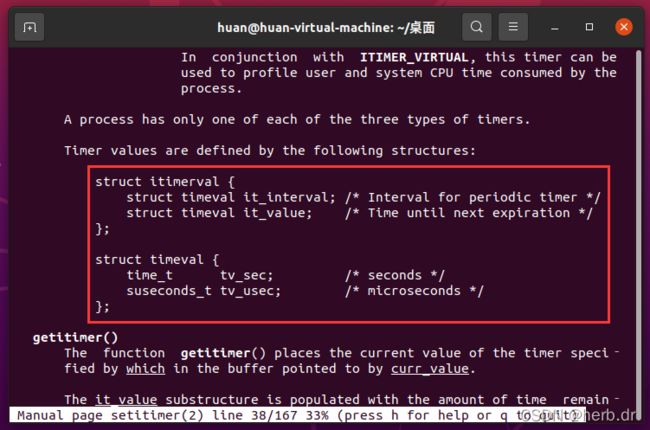
it_interval:用来设定两次定时任务之间间隔的时间
it_value:定时的时长
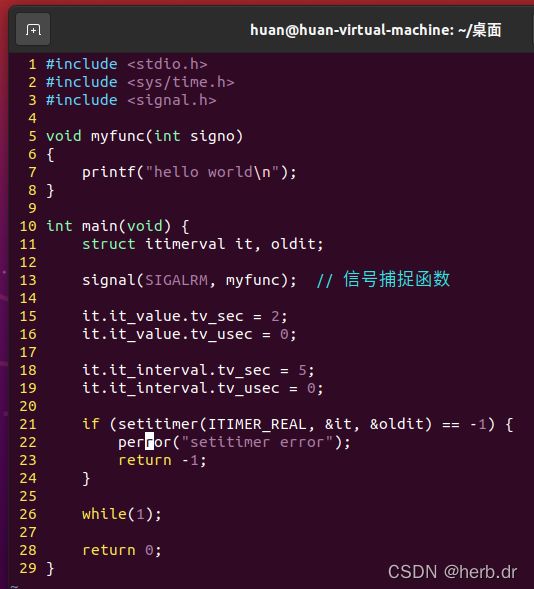
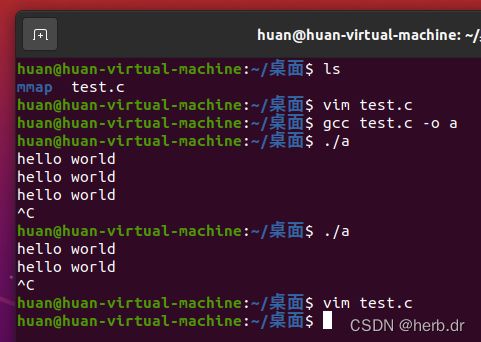
程序运行两秒后第一次发送时钟信号,后面每隔5秒发送一次
四、信号集操作函数
我们可以设置阻塞信号集,通过新建一个信号集,如下图
4.1 信号集操作函数
sigset_t set; 自定义信号集
sigemptyset(sigset_t *set); 清空信号集
sigfillset(sigset_t *set); 全部置1
sigaddset(sigset_t *set, int signum); 将一个信号添加到集合中
sigdelset(sigset_t *set, int signum); 将一个信号从集合中移除
sigismenber(const sigset_t *set, int signum); 判断一个信号是否在集合中。如果在集合中返回 1,否则返回 0
4.2 设置信号屏蔽字和解除屏蔽
int siaprocmas(int how, const sigset_t *set, sigset_t *oldset);
how:
SIG_BLOCK:设置阻塞
SIG_UNBLOCK:取消阻塞
SIG_SETMASK:用自定义 set 替换 mask
set:自定义 set
oldset:旧有的 mask
4.3 查看未决信号集
int sigpending(sigset_t *set);
set:传出的未决信号集
4.4 操作流程
第一步:自己新建一个阻塞信号集
sigset_t set;
sigemptyset(&set);
sigaddset(&set, SIGINT);
这个阻塞集合中除了 SIGINT 为 1,其他的均为 0
第二步:用自己创建的阻塞信号集和原来的做一个或操作
int siaprocmas(SID_BLOCK, &set, &oldset);
oldset 表示把原来的阻塞信号集传递回来
第三步:查看被阻塞的未决信号集
sigpending(&myset);
myset 传出参数
代码
#include
#include
#include
#include
#include
#include
#include
void sys_err(const char *str)
{
perror(str);
exit(1);
}
void print_set(sigset_t *set)
{
int i;
for (i = 1; i < 32; i++) {
if (sigismember(set, i)) {
putchar('1');
}
else {
putchar('0');
}
}
printf("\n");
}
int main(void) {
sigset_t set, oldset, pedset;
int ret = 0;
sigemptyset(&set);
sigaddset(&set, SIGINT);
ret = sigprocmask(SIG_BLOCK, &set, &oldset);
if (ret == -1) {
sys_err("sigprocmask error");
}
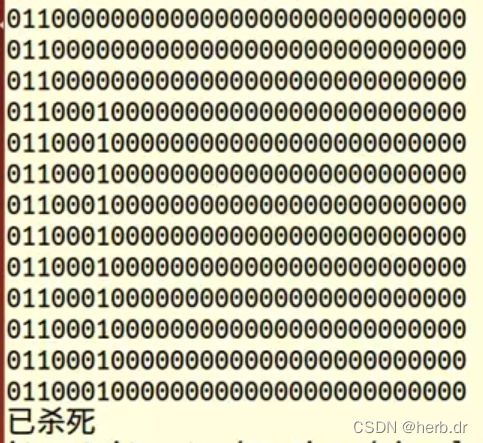
for (int k = 0; k < 60; k++) {
ret = sigpending(&pedset);
if (ret == -1) {
sys_err("sigpending error");
}
print_set(&pedset);
sleep(1);
}
return 0;
}
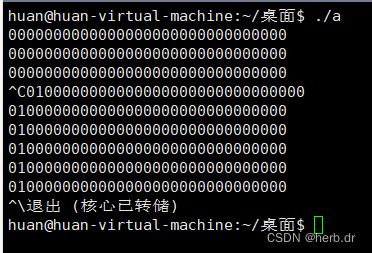
测试其他的
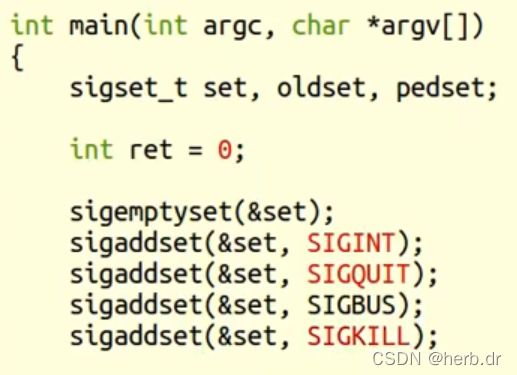
其中 9 号信号不能被屏蔽阻塞
五、信号捕捉
5.1 signal函数
1、作用:
注册一个信号捕捉函数
2、typedef void(*sighandler_t)(int);
sighandler_t signal(int signum, sighandler_t handler);
3、注意:
该函数由 ANSI 定义,由于历史原因在不同版本的 Unix 和不同版本的 Linux 中可能有不同的行为。因此应该尽量避免使用它,取而代之使用 sigaction 函数
4、代码
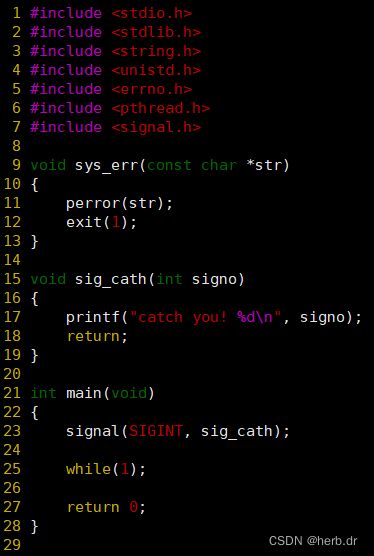
设置了捕捉就执行捕捉动作,没有设置捕捉就执行默认动作
5.2 sigaction函数
1、作用
修改信号处理动作(通常在 Linux 用其来注册一个信号的捕捉函数)
2、int sigaction(int signum, const struct sigaction *act, struct sigaction *oldact);
成功:0;失败:-1,设置 errnoe
参数:
act:传入参数,新的处理方式;oldact:传出参数,旧的处理方式
3、结构体
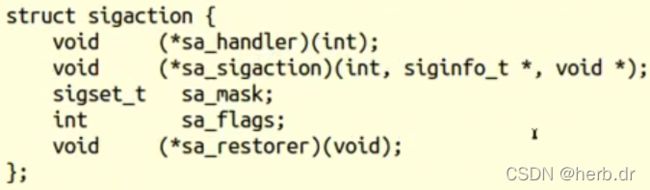
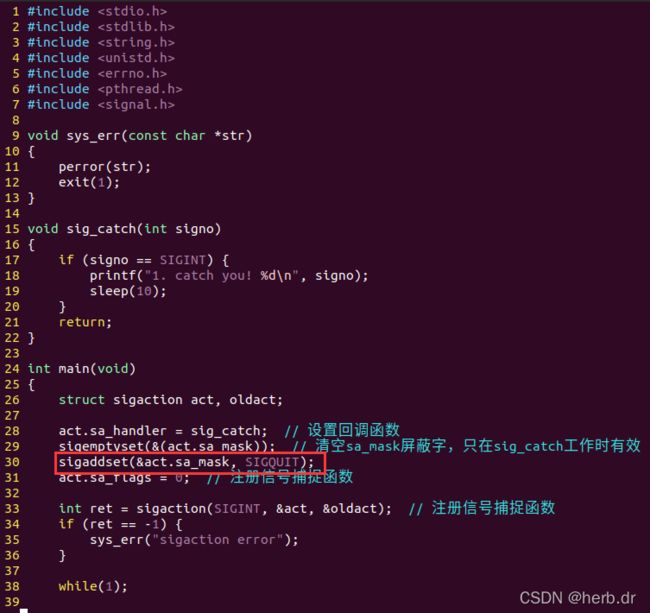
sa_handler 和 signal 的处理函数差不多
sa_mask 在执行信号处理函数的时候可能会有其他的信号到来,sa_mask 就可以设置阻塞哪些信号。注意仅仅是在信号处理函数正在执行时才能阻塞某些信号,如果信号处理程序执行完了,那么依然能接收到这些信号
sa_flag = 0,本信号默认屏蔽,不需要设置 mask
4、函数

5、特性
(1) 进程正常运行时, 默认PCB中有一个信号屏蔽字,假定为 ★,它决定了进程自动屏蔽哪些信号。当注册了某个信号捕捉函数,捕捉到该信号以后,要调用该函数。而该函数有可能执行很长时间,在这期间所屏蔽的信号不由众来指定。而是用 sa_mask 来指定。调用完信号处理函数,再恢复为★
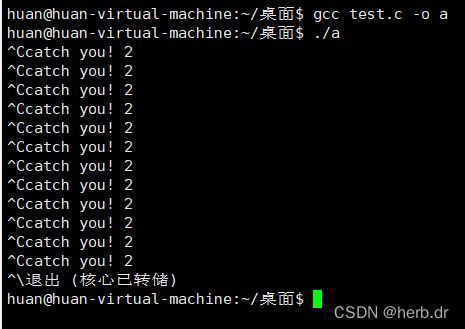
(2) XXX 信号捕捉函数执行期间,XXX 信号自动被屏蔽
(3) 阻塞的常规信号不支持排队,产生多次只记录一次。(后 32 个实时信号支持排队)
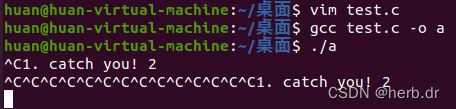
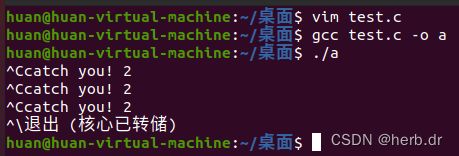
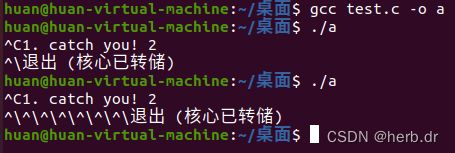
在睡眠的 10 秒内,如果传入 ctrl + \ 的信号会直接退出,如果想等执行完了睡眠 10 秒后再退出,可以按照下面的写法来写
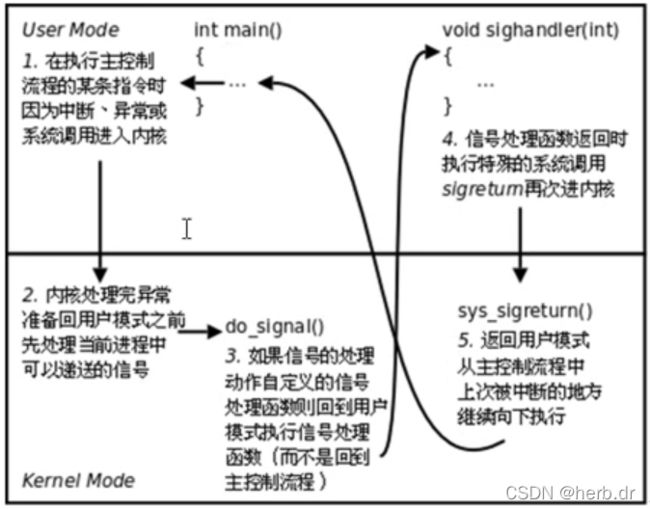
5.3 内核实现信号捕捉过程
六、SIGCHLD信号
6.1 SIGCHLD的产生条件
子进程终止时
子进程接收到 SIGSTOP 信号停止时
子进程处在停止态,接受到 SIGCONT 后唤醒时
6.2 借助SIGCHLD信号回收子进程
1、子进程结束运行,其父进程会收到 SIGCHLD 信号。该信号的默认处理动作是忽略。可以捕捉该信号,在捕捉函数中完成子进程状态的回收
2、代码
#include
#include
#include
#include
#include
#include
#include
#include
void sys_err(const char *str)
{
perror(str);
exit(1);
}
void catch_child(int signo)
{
pid_t wpid;
wpid = wait(NULL);
if (wpid == -1) {
sys_err("wait error");
}
printf("1. catch child where id = %d\n", wpid);
return;
}
int main(void)
{
pid_t pid;
int i;
for (i = 0; i < 10; i++) {
if ((pid = fork()) == 0) {
break;
}
}
if (i == 10) {
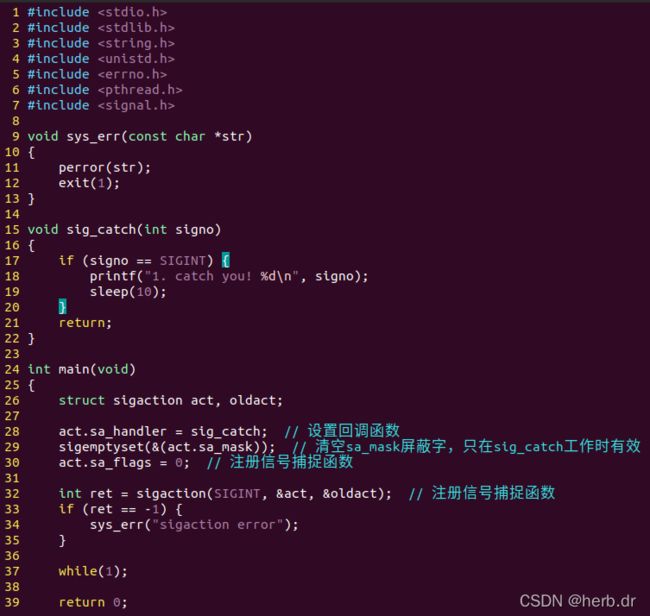
struct sigaction act;
act.sa_handler = catch_child; // 设置回调函数
sigemptyset(&(act.sa_mask)); // 清空sa_mask屏蔽字,只在sig_catch工作时有效
act.sa_flags = 0; // 注册信号捕捉函数
sigaction(SIGCHLD, &act, NULL); // 注册信号捕捉函数
printf("2. I'm parent where pid = %d\n", getpid());
while(1);
}
else {
printf ("3. I'm child where pid = %d\n", getpid());
}
return 0;
}
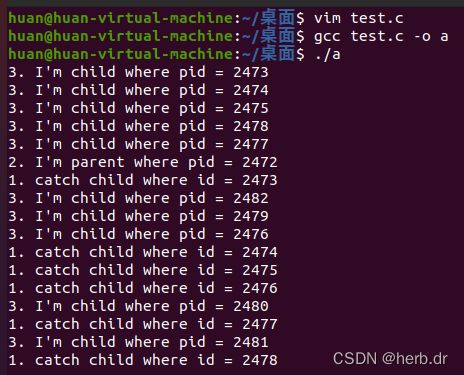
有一些僵尸进程,没有被回收
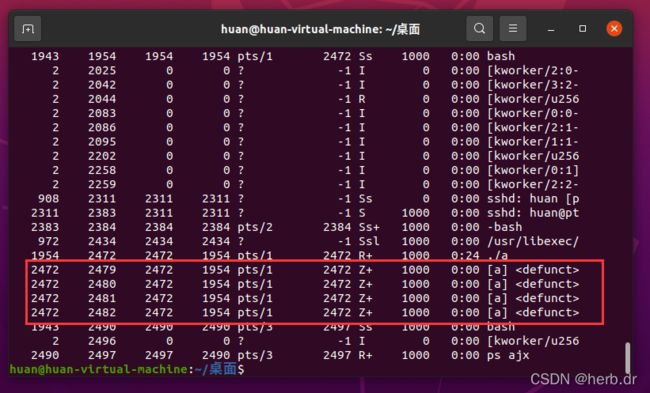
正在回收第一个子进程,第二个第三个子进程也死亡,发送信号过来,信号是不排队的,就会有一个没有被回收。
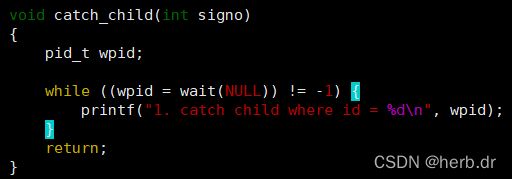
3、解决上述代码的问题
修改信号处理函数,使得一次处理可以回收多个子进程
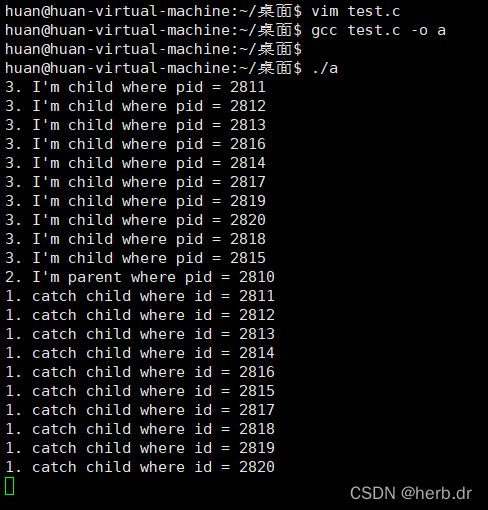
4、一些其他的改进
#include
#include
#include
#include
#include
#include
#include
#include
void sys_err(const char *str)
{
perror(str);
exit(1);
}
void catch_child(int signo)
{
pid_t wpid;
int status;
while ((wpid = waitpid(-1, &status, 0)) != -1) {
if (WIFEXITED(status)) {
printf("1. catch child where id = %d, ret = %d\n", wpid, WEXITSTATUS(status));
}
}
return;
}
int main(void)
{
pid_t pid;
int i;
for (i = 0; i < 10; i++) {
if ((pid = fork()) == 0) {
break;
}
}
if (i == 10) {
struct sigaction act;
act.sa_handler = catch_child; // 设置回调函数
sigemptyset(&(act.sa_mask)); // 清空sa_mask屏蔽字,只在sig_catch工作时有效
act.sa_flags = 0; // 注册信号捕捉函数
sigaction(SIGCHLD, &act, NULL); // 注册信号捕捉函数
printf("2. I'm parent where pid = %d\n", getpid());
while(1);
}
else {
sleep(1); // 防止设置信号捕捉前执行完子进程
printf ("3. I'm child where pid = %d\n", getpid());
return i;
}
return 0;
}
七、中断系统调用
7.1 系统调用分类
慢速系统调用和其他系统调用
1、慢速系统调用:可能会使进程永远阻塞的一类。如果在阻塞期间收到一个信号,该系统调用就被中断,不再继续执行(早期);也可以设定系统调用是否重启。如 read、write、pause、wait ...
2、其他系统调用:getpid、getppid、fork ...
7.2 结合 pause 回顾慢速系统调用
慢速系统调用被中断的相关行为,实际上就是 pause 的行为:如 read
① 想中断 pause,信号不能被屏蔽
② 信号的处理方式必须是捕捉(默认、忽略都不可以)
③ 中断后返回 -1,设置 errmo,为 EINTR(表 “被信号中断”)可修改 sa_ flags 参数来设置被信号中断后系统调用是否重启。SA_ INTERRURT 不重启。SA_ RESTART 重启