linux系统编程之信号
1 信号的概念
信号在我们的生活中随处可见, 如:古代战争中摔杯为号;现代战争中的信号弹;体育比赛中使用的信号枪......
它们都有共性: 1. 简单 2. 不能携带大量信息 3. 满足某个特设条件才发送。
信号是信息的载体, Linux/UNIX 环境下,古老、经典的通信方式, 现下依然是主要的通信手段。
Unix 早期版本就提供了信号机制,但不可靠,信号可能丢失。 Berkeley 和 AT&T 都对信号模型做了更改,增加了可靠信号机制。但彼此不兼容。 POSIX.1 对可靠信号例程进行了标准化。
2 信号的机制
A 给 B 发送信号, B 收到信号之前执行自己的代码,收到信号后,不管执行到程序的什么位置,都要暂停运行,去处理信号,处理完毕再继续执行。与硬件中断类似——异步模式。但信号是软件层面上实现的中断,早期常被称为“软中断”。
信号的特质:由于信号是通过软件方法实现,其实现手段导致信号有很强的延时性。但对于用户来说,这个延迟时间非常短,不易察觉。
每个进程收到的所有信号,都是由内核负责发送的,内核处理。
3 与信号相关的事件和状态
产生信号:
1 按键产生,如: Ctrl+c、 Ctrl+z、 Ctrl+\
2 系统调用产生,如: kill、 raise、 abort
3 软件条件产生,如:定时器 alarm
4 硬件异常产生,如:非法访问内存(段错误)、除 0(浮点数例外)、内存对齐出错(总线错误)
5 命令产生,如: kill 命令递达:递送并且到达进程。
未决:产生和递达之间的状态。主要由于阻塞(屏蔽)导致该状态。
信号的处理方式:
1 执行默认动作
2 忽略(丢弃)
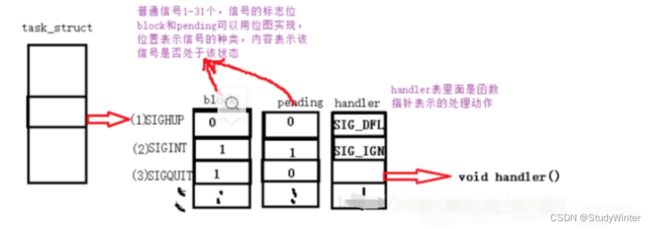
3 捕捉(调用户处理函数)Linux 内核的进程控制块 PCB 是一个结构体, task_struct, 除了包含进程 id,状态,工作目录,用户id,组 id,文件描述符表,还包含了信号相关的信息,主要指阻塞信号集和未决信号集。
阻塞信号集(信号屏蔽字): 将某些信号加入集合,对他们设置屏蔽,当屏蔽 x 信号后,再收到该信号,该信号的处理将推后(解除屏蔽后) 。
未决信号集:
1 信号产生,未决信号集中描述该信号的位立刻翻转为 1,表信号处于未决状态。当信号被处理对应位翻转回为 0。这一时刻往往非常短暂。
2 信号产生后由于某些原因(主要是阻塞)不能抵达。这类信号的集合称之为未决信号集。在屏蔽解除前,信号一直处于未决状态。
未决信号集:本质:位图。用来记录信号的处理状态。该信号集中的信号,表示,已经产生,但尚未被处理。
4 信号四要素
kill -l #查看当前系统中常规信号

1-31:常规信号;34-64:实时信号。
信号使用之前,应先确定其4要素,而后再用!!!
(1)编号
(2)名称
(3)信号对应事件
(4)信号默认处理动作。
1. Term:终止进程;
2. Ign: 忽略信号 (默认即时对该种信号忽略操作);
3. Core:终止进程,生成 Core 文件。(查验进程死亡原因, 用于 gdb 调试);
4. Stop:停止(暂停)进程;
5. Cont:继续运行进程。
5 linux常规信号汇总
1、SIGHUP: 当用户退出 shell 时,由该 shell 启动的所有进程将收到这个信号,默认动作为终止进程;
2、SIGINT:当用户按下了
3、SIGQUIT:当用户按下
4、SIGILL:CPU 检测到某进程执行了非法指令。默认动作为终止进程并产生 core 文件;
5、SIGTRAP:该信号由断点指令或其他 trap 指令产生。默认动作为终止里程 并产生 core 文件;
6、SIGABRT: 调用 abort 函数时产生该信号。默认动作为终止进程并产生 core 文件;
7、SIGBUS:非法访问内存地址,包括内存对齐出错,默认动作为终止进程并产生 core 文件;
8、SIGFPE:在发生致命的运算错误时发出。不仅包括浮点运算错误,还包括溢出及除数为 0 等所有的算法错误。默认动作为终止进程并产生 core 文件;
9、SIGKILL:无条件终止进程。本信号不能被忽略,处理和阻塞。默认动作为终止进程。它向系统管理员提供了可以杀死任何进程的方法;
10、SIGUSE1:用户定义 的信号。即程序员可以在程序中定义并使用该信号。默认动作为终止进程;
11、SIGSEGV:指示进程进行了无效内存访问。默认动作为终止进程并产生 core 文件;
12、SIGUSR2:另外一个用户自定义信号,程序员可以在程序中定义并使用该信号。默认动作为终止进程;
13、SIGPIPE:Broken pipe 向一个没有读端的管道写数据。默认动作为终止进程;
14、SIGALRM: 定时器超时,超时的时间 由系统调用 alarm 设置。默认动作为终止进程;
15、SIGTERM:程序结束信号,与 SIGKILL 不同的是,该信号可以被阻塞和终止。通常用来要示程序正常退出;执行 shell 命令 Kill 时,缺省产生这个信号。默认动作为终止进程;
16、SIGSTKFLT:Linux 早期版本出现的信号,现仍保留向后兼容。默认动作为终止进程;
17、SIGCHLD:子进程状态发生变化时,父进程会收到这个信号。默认动作为忽略这个信号;
18、SIGCONT:如果进程已停止,则使其继续运行。默认动作为继续/忽略;
19、SIGSTOP:停止进程的执行。信号不能被忽略,处理和阻塞。默认动作为暂停进程;
20、SIGTSTP:停止终端交互进程的运行。按下
21、SIGTTIN:后台进程读终端控制台。默认动作为暂停进程;
22、SIGTTOU: 该信号类似于 SIGTTIN,在后台进程要向终端输出数据时发生。默认动作为暂停进程;
23、SIGURG:套接字上有紧急数据时,向当前正在运行的进程发出些信号,报告有紧急数据到达。如网络带外数据到达,默认动作为忽略该信号;
24、SIGXCPU:进程执行时间超过了分配给该进程的 CPU 时间 ,系统产生该信号并发送给该进程。默认动作为终止进程;
25、SIGXFSZ:超过文件的最大长度设置。默认动作为终止进程;
26、SIGVTALRM:虚拟时钟超时时产生该信号。类似于 SIGALRM,但是该信号只计算该进程占用 CPU的使用时间。默认动作为终止进程;
27、SGIPROF:类似于 SIGVTALRM,它不公包括该进程占用 CPU 时间还包括执行系统调用时间。默认动作为终止进程;
28、SIGWINCH:窗口变化大小时发出。默认动作为忽略该信号;
29、SIGIO:此信号向进程指示发出了一个异步 IO 事件。默认动作为忽略;
30、SIGPWR:关机。默认动作为终止进程;
31、SIGSYS:无效的系统调用。默认动作为终止进程并产生 core 文件;
32、SIGRTMIN ~ (64) SIGRTMAX:LINUX 的实时信号,它们没有固定的含义(可以由用户自定义)。所有的实时信号的默认动作都为终止进程。
6 信号的产生
6.1 终端按键产生信号
1. Ctrl + c → 2) SIGINT(终止/中断) “INT” ----Interrupt
2. Ctrl + z → 20) SIGTSTP(暂停/停止) “T” ----Terminal 终端。
3. Ctrl + \ → 3) SIGQUIT(退出)
6.2 硬件异常产生信号
1. 除 0 操作 → 8) SIGFPE (浮点数例外) “F” -----float 浮点数。
2. 非法访问内存 → 11) SIGSEGV (段错误)。总线错误 → 7) SIGBUS
6.3 kill 函数/命令产生信号
函数原型
int kill(pid_t pid, int sig);
// 成功:0;失败:-1 (ID 非法,信号非法,普通用户杀 init 进程等权级问题),设置errno
// pid > 0: 发送信号给指定的进程。
// pid = 0: 发送信号给 与调用 kill 函数进程属于同一进程组的所有进程。
// pid < 0: 取|pid|发给对应进程组。
// pid = -1:发送给进程有权限发送的系统中所有进程。
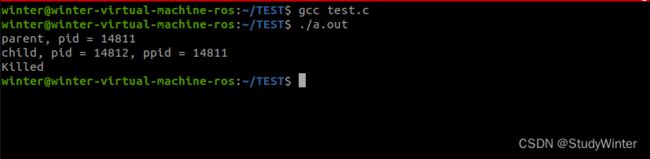
// sig:不推荐直接使用数字,应使用宏名,因为不同操作系统信号编号可能不同,但名称一致子进程kill父进程
#include
#include
#include
#include
#include
#include
int main(int argc, char *argv[])
{
pid_t pid = fork();
if (pid > 0)
{
// 父进程
printf("parent, pid = %d\n", getpid());
while (1) ;
}
else if (pid == 0)
{
// 子进程
printf("child, pid = %d, ppid = %d\n", getpid(), getppid());
kill(getppid(), SIGKILL);
// kill(getppid(), SIGSEGV);
}
else
{
perror("fork error\n");
}
return 0;
} 执行
kill 命令
kill -SIGKILL pid # kill 命令产生信号
kill -9 -groupname # 杀一个进程组6.4 软件条件产生信号
6.4.1 alarm函数原型
设置定时器(闹钟)。在指定 seconds 后,内核会给当前进程发送 14)SIGALRM 信号。进程收到该信号,默认动作终止。
每个进程都有且只有唯一个定时器
unsigned int alarm(unsigned int seconds);
// 返回 0 或剩余的秒数,无失败。
// 常用:取消定时器 alarm(0),返回旧闹钟余下秒数。time 命令 : 查看程序执行时间。
实际时间 = 用户时间 + 内核时间 + 等待时间。 --》 优化瓶颈 IO
#include
#include
#include
#include
#include
#include
int main(int argc, char *argv[])
{
int i;
alarm(1);
for (i = 0;; i++)
{
printf("%d\n", i);
}
return 0;
} 执行
 即计算机1s钟可以数多少个数。
即计算机1s钟可以数多少个数。
6.4.2 使用 time 命令查看程序执行的时间(优化)
执行
time ./a.out 结果

将结果重定向到out中
time ./a.out > out执行

输出out的内容
 结论:程序运行的瓶颈在于 IO,优化程序,首选优化 IO。
结论:程序运行的瓶颈在于 IO,优化程序,首选优化 IO。
6.4.3 setitimer函数原型
函数原型

setitimer函数
int setitimer(int which,
const struct itimerval *new_value,
struct itimerval *old_value);
// 返回值:
// 成功: 0
// 失败: -1 errno参数1:which
which:
ITIMER_REAL: // 采用自然计时。 ——> SIGALRM
ITIMER_VIRTUAL: // 采用用户空间计时(进程占CPU时间) ---> SIGVTALRM
ITIMER_PROF: // 采用内核+用户空间计时 ---> SIGPROF参数2:new_value:结构体设置间隔时间和单次时间
new_value:
// 定时秒数
// 类型:
struct itimerval {
struct timeval {
time_t tv_sec; /* seconds */
suseconds_t tv_usec; /* microseconds */
}it_interval; // 周期定时秒数
struct timeval {
time_t tv_sec;
suseconds_t tv_usec;
}it_value; // 第一次定时秒数
};参数3:old_value:传出参数,上次定时剩余时间。
e.g.:
struct itimerval new_t;
struct itimerval old_t;
new_t.it_interval.tv_sec = 0;
new_t.it_interval.tv_usec = 0;
new_t.it_value.tv_sec = 1;
new_t.it_value.tv_usec = 0;
int ret = setitimer(&new_t, &old_t); // 定时1秒使用setitimer定时,向屏幕打印信息:

第一次信息打印是两秒间隔,之后都是5秒间隔打印一次。可以理解为第一次是有个定时器,什么时候触发打印,之后就是间隔时间。
实现alarm
#include
#include
#include
#include
#include
#include
#include
unsigned int myAlarm(unsigned int sec)
{
struct itimerval it, oldit;
it.it_value.tv_sec = sec;
it.it_value.tv_usec = 0;
it.it_interval.tv_sec = 0;
it.it_interval.tv_usec = 0;
if (setitimer(ITIMER_REAL, &it, &oldit) == -1)
{
perror("setitimer error\n");
exit(1);
}
return oldit.it_value.tv_sec;
}
int main(int argc, char *argv[])
{
myAlarm(1);
int i;
for (i = 0;; i++)
{
printf("%d\n", i);
}
return 0;
} 执行

7 信号集操作函数+原理(重)
控制原理:内核通过读取未决信号集来判断信号是否应被处理。信号屏蔽字 mask 可以影响未决信号集。
而我们可以在应用程序中自定义 set 来改变 mask。已达到屏蔽指定信号的目的。(重点)

阻塞信号集、未决信号集默认0
信号集操作函数:
sigset_t set;
// 自定义信号集。typedef unsignedlong sigset_t;
sigemptyset(sigset_t *set);
// 将某个信号集清 0 成功:0;失败:-1
sigfillset(sigset_t *set);
// 将某个信号集置 1 成功:0;失败:-1
sigaddset(sigset_t *set, int signum);
// 将某个信号加入信号集 成功:0;失败:-1
sigdelset(sigset_t *set, int signum);
// 将某个信号清出信号集 成功:0;失败:-1
sigismember(const sigset_t *set,int signum);
// 判断某个信号是否在信号集中 返回值:在集合:1;不在:0;出错:-17.1 sigprocmask 函数
用来屏蔽信号、解除屏蔽也使用该函数。其本质,读取或修改进程的信号屏蔽字(PCB 中)
int sigprocmask(int how, const sigset_t *set, sigset_t *oldset);
// how: SIG_BLOCK: 设置阻塞
// SIG_UNBLOCK: 取消阻塞
// SIG_SETMASK: 用自定义set替换mask。
// set: 自定义set
// oldset:旧有的 mask。7.2 sigpending 函数
查看未决信号集
int sigpending(sigset_t *set);
// set: 传出的 未决信号集。7.3 信号操作函数使用原理分析
上来全部是0。
自己写的set
信号屏蔽字mask

用到的函数
sigset_t set, mySet;
sigemptyset(&set);
sigaddset(&set, SIGINT)
sigprocmask(SIG_BLOCK, &set);
sigpending(&mySet);信号列表:

其中9号和19号信号比较特殊,只能执行默认动作,不能忽略捕捉,不能设置阻塞。
下面这个小例子,利用自定义集合,来设置信号阻塞,我们输入被设置阻塞的信号,可以看到未决信号集发生变化:
#include
#include
#include
#include
#include
#include
void printSet(sigset_t *set)
{
int i;
for (i = 1; i < 32; i++)
{
if (sigismember(set, i))
{
putchar('1');
}
else
{
putchar('0');
}
}
printf("\n");
}
int main(int argc, char *argv[])
{
// 自定义信号集
sigset_t set, oldSet, pedSet;
int res = 0;
sigemptyset(&set); // 清空信号集
sigaddset(&set, SIGINT); // ctrl + c
sigaddset(&set, SIGQUIT); // ctrl + /
sigaddset(&set, SIGBUS);
sigaddset(&set, SIGKILL); // kill只能默认
res = sigprocmask(SIG_BLOCK, &set, &oldSet); // 设置到阻塞信号集里
if (res == -1)
{
perror("sigprocmask error\n");
}
while (1)
{
// 查看未决信号集
res = sigpending(&pedSet);
if (res == -1)
{
perror("sigpending error\n");
}
printSet(&pedSet);
sleep(1);
}
return 0;
} 执行

可以看到,在输入Ctrl+C之后,进程捕捉到信号,但由于设置阻塞,没有处理,未决信号集对应位置变为1.
其中9号和19号信号比较特殊,只能执行默认动作,不能忽略捕捉,不能设置阻塞。
8 信号捕捉
8.1 signal 函数
作用:注册一个信号捕捉函数(注册而非创建)
原型:
sighandler_t signal(int signum, sighandler_t handler);
// signum :待捕捉信号
// handler:捕捉信号后的操纵函数
typedef void (*sighandler_t)(int);
// 函数指针类型 需要注意的就是需要传入一个整形参数 不管用不用返回值:

信号捕捉特性:
1 捕捉函数执行期间,信号屏蔽字 由 mask --> sa_mask , 捕捉函数执行结束。 恢复回mask
2 捕捉函数执行期间,本信号自动被屏蔽(sa_flgs = 0).
3 捕捉函数执行期间,被屏蔽信号多次发送,解除屏蔽后只处理一次!一个信号捕捉的小例子
#include
#include
#include
#include
#include
#include
void signalCatch(int signum)
{
printf("catch you %d\n", signum);
}
int main(int argc, char *argv[])
{
// 注册信号捕捉函数, 当信号SIGINT触发时,调用signalCatch
signal(SIGINT, signalCatch);
while (1)
;
return 0;
} 执行

8.2 sigaction实现信号捕捉
sigaction也是注册一个信号捕捉函数
int sigaction(int signum, const struct sigaction *act,
struct sigaction *oldact);结构体:
struct sigaction {
void (*sa_handler)(int);
void (*sa_sigaction)(int, siginfo_t *, void *);
sigset_t sa_mask;
int sa_flags;
void (*sa_restorer)(void);
};返回值
![]()
下面的小例子,使用sigaction捕捉两个信号:
#include
#include
#include
#include
#include
#include
// 捕捉函数,回调函数【内核调】
void signalCatch(int signum)
{
if (signum == SIGINT)
{
printf("catch you %d\n", signum);
sleep(10);
}
else if (signum == SIGQUIT)
{
printf("--------catch you %d---------\n", signum);
}
}
int main(int argc, char *argv[])
{
struct sigaction act, oldact;
act.sa_handler = signalCatch; // 设置回调函数
sigemptyset(&act.sa_mask); // 设置屏蔽字,只在signalCatch工作时有效,清空sa_mask屏蔽字
act.sa_flags = 0; // 默认值
// 注册信号捕捉函数, 当信号SIGINT触发时,调用signalCatch
int res = sigaction(SIGINT, &act, &oldact);
if (res == -1)
{
perror("sigaction error\n");
}
res = sigaction(SIGQUIT, &act, &oldact);
if (res == -1)
{
perror("sigaction error\n");
}
while (1);
return 0;
} 执行
 如图,两个信号都捕捉到了,并且输出了对应字符串。
如图,两个信号都捕捉到了,并且输出了对应字符串。
8.3 信号捕捉的特性
特性
捕捉函数执行期间,信号屏蔽字 由 mask --> sa_mask , 捕捉函数执行结束。 恢复回mask
捕捉函数执行期间,本信号自动被屏蔽(sa_flgs = 0).
捕捉函数执行期间,被屏蔽信号多次发送,解除屏蔽后只处理一次!8.4 内核实现信号捕捉简析
值得说明的是第四步到达第五步,因为函数处理完需要返回(类似于返回值的感觉),在函数处理之前我们实在内核空间,所以还要返回一次。
 9 SIGCHLD信号(面试常问)
9 SIGCHLD信号(面试常问)
9.1 SIGCHLD的产生条件
SIGCHLD的产生条件:
子进程终止时
子进程接收到SIGSTOP
子进程处于停止态,接收到SIGCONT后唤醒时9.2 借助 SIGCHLD 信号回收子进程(重)
子进程结束运行,其父进程会收到 SIGCHLD 信号。该信号的默认处理动作是忽略。
可以捕捉该信号,在捕捉函数中完成子进程状态的回收。
注意
有几个代码中需要注意的问题 [ 重要]
(1)开始设置的信号阻塞,是为了防止子进程结束了,父进程还没有走到注册捕获信号函数。这样就会导致子进程结束信号还是会执行默认的事件–忽略。所以多个了阻塞和解除阻塞。
(2)自定义事件do_sig_child中的while是为了防止,同一时间多个子进程同时结束,同时发送信号,就会导致性质二【XXX 信号捕捉函数执行期间,XXX 信号自动被屏蔽。】。最多两个信号事件执行,多个子进程信号被忽略了。
(3)父进程结束的时候我们要加个循环,防止父进程先与子进程结束,导致捕捉信号执行自定义函数的功能失效。
#include
#include
#include
#include
#include
#include
#include
// 信号捕捉函数
void catchchild(int num)
{
pid_t wpid;
while ((wpid = wait(NULL)) != -1)
{
printf("--------catch child,id = %d\n", wpid);
}
return;
}
int main(int argc, char *argv[])
{
pid_t pid;
int i;
// 创建5个子进程
for (i = 0; i < 5; i++)
{
if ((pid = fork()) == 0)
{
break;
}
}
// 父进程回收子进程
if (i == 5)
{
struct sigaction act, oldact;
act.sa_handler = catchchild; // 信号捕捉函数
sigemptyset(&act.sa_mask); // 设置捕捉函数执行期间屏蔽字
act.sa_flags = 0; // 设置默认属性, 本信号自动屏蔽
// 父进程注册信号捕捉函数,回收子进程
sigaction(SIGCHLD, &act, &oldact);
printf("I'm parent, pid = %d \n", getpid());
while (1)
;
}
else
{
printf("I‘m child ,pid = %d \n", getpid());
}
return 0;
} 执行

不清楚这里为什么会出现段错误。
还有一个问题需要注意,这里有可能父进程还没注册完捕捉函数,子进程就死亡了,解决这个问题的方法,首先是让子进程sleep,但这个不太科学。在fork之前注册也行,但这个也不是很科学。最科学的方法是在int i之前设置屏蔽,等父进程注册完捕捉函数再解除屏蔽。这样即使子进程先死亡了,信号也因为被屏蔽而无法到达父进程。解除屏蔽过后,父进程就能处理累积起来的信号了。
10 中断系统调用
系统调用可分为两类:慢速系统调用和其他系统调用
- 慢速系统调用:可能会使进程永远阻塞的一类。如果在阻塞期间收到一个信号,该系统调用就被中断,不再继续执行(早期);也可以设定系统调用是否重启。如, read、 write、 pause、 wait...
- 其他系统调用: getpid、 getppid、 fork...
结合 pause,回顾慢速系统调用:
慢速系统调用被中断的相关行为,实际上就是 pause 的行为: 如, read
① 想中断 pause,信号不能被屏蔽。
② 信号的处理方式必须是捕捉 (默认、忽略都不可以)
③ 中断后返回-1, 设置 errno 为 EINTR(表“被信号中断” )
可修改 sa_flags 参数来设置被信号中断后系统调用是否重启。 SA_INTERRURT 不重启。 SA_RESTART重启。sa_flags 还有很多可选参数, 适用于不同情况。 如:捕捉到信号后,在执行捕捉函数期间,不希望自动阻塞该信号,可将 sa_flags 设置为 SA_NODEFER,除非 sa_mask 中包含该信号。