深度学习教程(4) | 深层神经网络(吴恩达·完整版)

- 作者:韩信子@ShowMeAI
- 教程地址:https://www.showmeai.tech/tutorials/35
- 本文地址:https://www.showmeai.tech/article-detail/215
- 声明:版权所有,转载请联系平台与作者并注明出处
- 收藏ShowMeAI查看更多精彩内容

本系列为吴恩达老师《深度学习专项课程(Deep Learning Specialization)》学习与总结整理所得,对应的课程视频可以在这里查看。
引言
在ShowMeAI前一篇文章 浅层神经网络 中我们对以下内容进行了介绍:
- 神经网络的基本结构(输入层,隐藏层和输出层)。
- 浅层神经网络前向传播和反向传播过程。
- 神经网络参数的梯度下降优化。
- 不同的激活函数的优缺点及非线性的原因。
- 神经网络参数随机初始化方式
本篇内容我们将讨论深层神经网络。
1.深层神经网络

我们在前面提到了浅层神经网络,深层神经网络其实就是包含更多隐层的神经网络。下图分别列举了不同深度的神经网络模型结构:
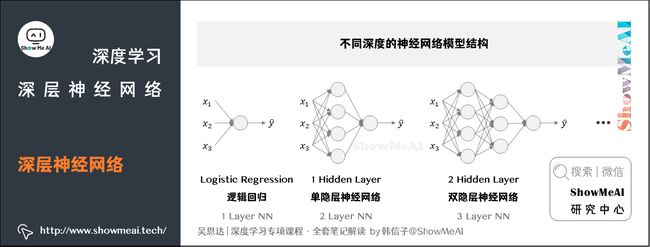
我们会参考「隐层个数」和「输出层」对齐命名。如上图逻辑回归可以叫做1 layer NN,单隐层神经网络可以叫做2 layer NN,2个隐层的神经网络叫做3 layer NN,以此类推。所以当我们提到L layer NN,指的是包含 L − 1 L-1 L−1个隐层的神经网络。
下面我们来了解一下神经网络的一些标记写法。以如下图的4层神经网络为例:
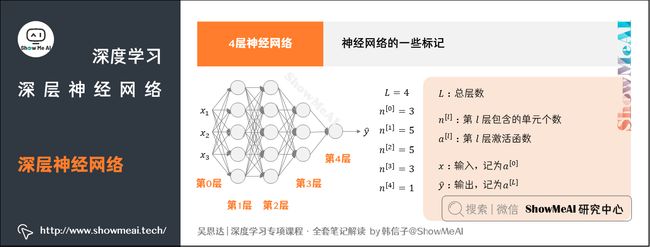
① 总层数用 L L L表示, L = 4 L=4 L=4
- 输入层是第 0 0 0层,输出层是第 L L L层
② n [ l ] n^{[l]} n[l]表示第 l l l层包含的单元个数, l = 0 , 1 , ⋯ , L l=0,1,\cdots,L l=0,1,⋯,L
-
下图模型中, n [ 0 ] = n x = 3 n^{[0]}=n_x=3 n[0]=nx=3,表示三个输入特征 x 1 x_1 x1、 x 2 x_2 x2、 x 3 x_3 x3
-
下图模型中 n [ 1 ] = 5 n^{[1]}=5 n[1]=5, n [ 2 ] = 5 n^{[2]}=5 n[2]=5, n [ 3 ] = 3 n^{[3]}=3 n[3]=3, n [ 4 ] = n [ L ] = 1 n^{[4]}=n^{[L]}=1 n[4]=n[L]=1
③ 第 l l l层的激活函数输出用 a [ l ] a^{[l]} a[l]表示, a [ l ] = g [ l ] ( z [ l ] ) a^{[l]}=g^{[l]}(z^{[l]}) a[l]=g[l](z[l])
④ W [ l ] W^{[l]} W[l]表示第 l l l层的权重,用于计算 z [ l ] z^{[l]} z[l]
⑤ 输入 x x x记为 a [ 0 ] a^{[0]} a[0]
⑥ 输出层 y ^ \hat y y^记为 a [ L ] a^{[L]} a[L]
注意, a [ l ] a^{[l]} a[l]和 W [ l ] W^{[l]} W[l]中的上标 l l l都是从1开始的, l = 1 , ⋯ , L l=1,\cdots,L l=1,⋯,L。
2.深层神经网络前向运算

下面我们来推导一下深层神经网络的前向传播计算过程。依旧是上面提到的4层神经网络,我们以其为例来做讲解。
2.1 单个样本的计算
对于单个样本,我们有:

2.2 m个样本的批量计算
对于 m m m个训练样本的情况,我们以向量化矩阵形式来并行计算:

以此类推,对于第 l l l层,其前向传播过程的 Z [ l ] Z^{[l]} Z[l]和 A [ l ] A^{[l]} A[l]可以表示为:
Z [ l ] = W [ l ] A [ l − 1 ] + b [ l ] Z^{[l]}=W^{[l]}A^{[l-1]}+b^{[l]} Z[l]=W[l]A[l−1]+b[l]
A [ l ] = g [ l ] ( Z [ l ] ) A^{[l]}=g^{[l]}(Z^{[l]}) A[l]=g[l](Z[l])
其中 l = 1 , ⋯ , L l=1,\cdots,L l=1,⋯,L
3.向量化形态下的矩阵维度

在单个训练样本的场景下,输入 x x x的维度是 ( n [ 0 ] , 1 ) (n^{[0]},1) (n[0],1)神经网络的参数 W [ l ] W^{[l]} W[l]和 b [ l ] b^{[l]} b[l]的维度分别是:
-
W [ l ] : ( n [ l ] , n [ l − 1 ] ) W^{[l]}: (n^{[l]},n^{[l-1]}) W[l]:(n[l],n[l−1])
-
b [ l ] : ( n [ l ] , 1 ) b^{[l]}: (n^{[l]},1) b[l]:(n[l],1)
其中,
- l = 1 , ⋯ , L l=1,\cdots,L l=1,⋯,L
- n [ l ] n^{[l]} n[l]和 n [ l − 1 ] n^{[l-1]} n[l−1]分别表示第 l l l层和 l − 1 l-1 l−1层的所含单元个数
- n [ 0 ] = n x n^{[0]}=n_x n[0]=nx,表示输入层特征数目
对应的反向传播过程中的 d W [ l ] dW^{[l]} dW[l]和 d b [ l ] db^{[l]} db[l]的维度分别是:
-
d W [ l ] : ( n [ l ] , n [ l − 1 ] ) dW^{[l]}:\ (n^{[l]},n^{[l-1]}) dW[l]: (n[l],n[l−1])
-
d b [ l ] : ( n [ l ] , 1 ) db^{[l]}:\ (n^{[l]},1) db[l]: (n[l],1)
-
注意到, W [ l ] W^{[l]} W[l]与 d W [ l ] dW^{[l]} dW[l]维度相同, b [ l ] b^{[l]} b[l]与 d b [ l ] db^{[l]} db[l]维度相同。这很容易理解。
正向传播过程中的 z [ l ] z^{[l]} z[l]和 a [ l ] a^{[l]} a[l]的维度分别是:
-
z [ l ] : ( n [ l ] , 1 ) z^{[l]}:\ (n^{[l]},1) z[l]: (n[l],1)
-
a [ l ] : ( n [ l ] , 1 ) a^{[l]}:\ (n^{[l]},1) a[l]: (n[l],1)
-
z [ l ] z^{[l]} z[l]和 a [ l ] a^{[l]} a[l]的维度是一样的,且 d z [ l ] dz^{[l]} dz[l]和 d a [ l ] da^{[l]} da[l]的维度均与 z [ l ] z^{[l]} z[l]和 a [ l ] a^{[l]} a[l]的维度一致。

对于 m m m个训练样本,输入矩阵 X X X的维度是 ( n [ 0 ] , m ) (n^{[0]},m) (n[0],m)。需要注意的是 W [ l ] W^{[l]} W[l]和 b [ l ] b^{[l]} b[l]的维度与只有单个样本是一致的:
-
W [ l ] : ( n [ l ] , n [ l − 1 ] ) W^{[l]}:\ (n^{[l]},n^{[l-1]}) W[l]: (n[l],n[l−1])
-
b [ l ] : ( n [ l ] , 1 ) b^{[l]}:\ (n^{[l]},1) b[l]: (n[l],1)
只不过在运算 Z [ l ] = W [ l ] A [ l − 1 ] + b [ l ] Z^{[l]}=W^{[l]}A^{[l-1]}+b^{[l]} Z[l]=W[l]A[l−1]+b[l]中, b [ l ] b^{[l]} b[l]会被当成 ( n [ l ] , m ) (n^{[l]},m) (n[l],m)矩阵进行运算,这是基于python numpy的广播特性,且 b [ l ] b^{[l]} b[l]每一列向量都是一样的。 d W [ l ] dW^{[l]} dW[l]和 d b [ l ] db^{[l]} db[l]的维度分别与 W [ l ] W^{[l]} W[l]和 b [ l ] b^{[l]} b[l]的相同。
不过, Z [ l ] Z^{[l]} Z[l]和 A [ l ] A^{[l]} A[l]的维度发生了变化:
-
Z [ l ] : ( n [ l ] , m ) Z^{[l]}:\ (n^{[l]},m) Z[l]: (n[l],m)
-
A [ l ] : ( n [ l ] , m ) A^{[l]}:\ (n^{[l]},m) A[l]: (n[l],m)
-
d Z [ l ] dZ^{[l]} dZ[l]和 d A [ l ] dA^{[l]} dA[l]的维度分别与 Z [ l ] Z^{[l]} Z[l]和 A [ l ] A^{[l]} A[l]的相同。
4.为什么需要深度网络

当今大家看到的很多AI智能场景背后都是巨大的神经网络在支撑,强大能力很大一部分来源于神经网络足够“深”,也就是说随着网络层数增多,神经网络就更加复杂参数更多,学习能力也更强。下面是一些典型的场景例子说明。
4.1 人脸识别例子
如下图所示的人脸识别场景,训练得到的神经网络,每一层的作用有差别:
- 第一层所做的事就是从原始图片中提取出人脸的轮廓与边缘,即边缘检测。这样每个神经元得到的是一些边缘信息。
- 第二层所做的事情就是将前一层的边缘进行组合,组合成人脸一些局部特征,比如眼睛、鼻子、嘴巴等。
- 后续层次逐层把这些局部特征组合起来,融合成人脸的模样。
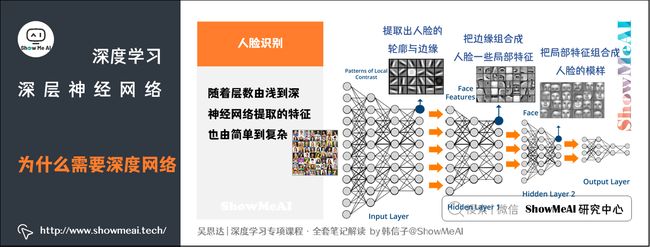
可以看出,随着层数由浅到深,神经网络提取的特征也是从边缘到局部特征到整体,由简单到复杂。隐藏层越多,能够提取的特征就越丰富、越复杂,模型的准确率也可能会随之越高。(详细的人脸识别原理可以查看ShowMeAI的文章 CNN应用:人脸识别和神经风格转换 )
4.2 语音识别例子
语音识别模型也是类似的道理:
- 浅层的神经元能够检测一些简单的音调
- 较深的神经元能够检测出基本的音素
- 更深的神经元就能够检测出单词信息
- 网络足够深的话,还能对短语、句子进行检测
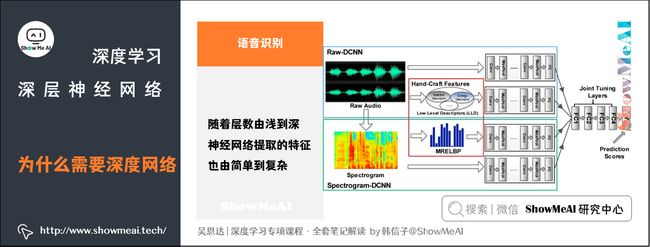
神经网络从浅到深,提取的特征从简单到复杂。特征复杂度与神经网络层数成正相关。特征越来越复杂,表达能力和功能也越强。(详细的语音识别原理知识可以查看ShowMeAI的文章 Seq2seq序列模型和注意力机制 )
4.3 深度网络其他优势
除学习能力与特征提取强度之外,深层网络还有另外一个优点,就是能够减少神经元个数,从而减少计算量。
下面有一个例子,使用电路理论,计算逻辑输出:
y = x 1 ⊕ x 2 ⊕ x 3 ⊕ ⋯ ⊕ x n y=x_1\oplus x_2\oplus x_3\oplus\cdots\oplus x_n y=x1⊕x2⊕x3⊕⋯⊕xn
- 上面的计算表达式中, ⊕ \oplus ⊕表示「异或」操作。
对于这个逻辑运算,如果使用深度网络完成,每层将前一层的两两单元进行异或,最后到一个输出,如下图左边所示。
这样,整个深度网络的层数是 l o g 2 ( n ) log_2(n) log2(n)(不包含输入层)。总共使用的神经元个数为:
1 + 2 + ⋯ + 2 l o g 2 ( n ) − 1 = 1 ⋅ 1 − 2 l o g 2 ( n ) 1 − 2 = 2 l o g 2 ( n ) − 1 = n − 1 1+2+\cdots+2^{log_2(n)-1}=1\cdot\frac{1-2^{log_2(n)}}{1-2}=2^{log_2(n)}-1=n-1 1+2+⋯+2log2(n)−1=1⋅1−21−2log2(n)=2log2(n)−1=n−1
可见,输入个数是 n n n,这种深层网络所需的神经元个数仅仅是 n − 1 n-1 n−1个。
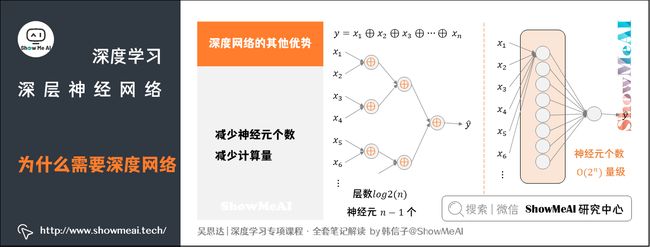
如果不用深层网络,仅仅使用单个隐藏层,如上右图所示,由于包含了所有的逻辑位(0和1),那么需要的神经元个数 O ( 2 n ) O(2^n) O(2n)是指数级别的大小。
对于其他场景和问题也一样,处理同样的逻辑问题,深层网络所需的神经元个数比浅层网络要少很多。这也是深层神经网络的优点之一。
尽管深度学习有着非常显著的优势,吴恩达老师还是建议对实际问题进行建模时,尽量先选择层数少的神经网络模型,这也符合奥卡姆剃刀定律(Occam’s Razor)。对于比较复杂的问题,再使用较深的神经网络模型。
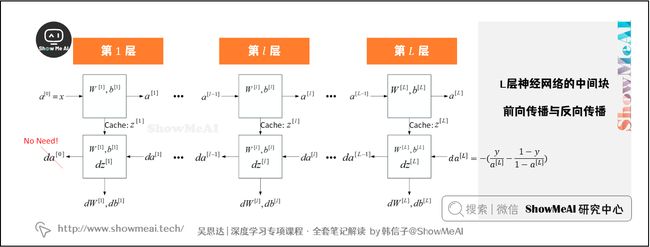
5.构建深度网络单元块

下面用流程块图来解释神经网络前向传播和反向传播过程。

如图所示,对于第 l l l层来说,前向传播过程中,我们有:
- 输入:$a^{[l-1]} $
- 输出:$a^{[l]} $
- 参数: W [ l ] W^{[l]} W[l]、 b [ l ] b^{[l]} b[l]
- 缓存变量:$z^{[l]} $
反向传播过程中:
- 输入:$da^{[l]} $
- 输出:$da^{[l-1]} 、 、 、dW^{[l]} 、 、 、db^{[l]}$
- 参数: W [ l ] W^{[l]} W[l]、 b [ l ] b^{[l]} b[l]
上面是第 l l l层的流程块图,对于神经网络所有层,整体的流程块图前向传播过程和反向传播过程如下所示:
6.前向传播与反向传播

我们继续接着上一部分流程块图的内容,推导神经网络正向传播过程和反向传播过程的具体表达式。
6.1 前向传播过程
令层数为第 l l l层,输入是 a [ l − 1 ] a^{[l-1]} a[l−1],输出是 a [ l ] a^{[l]} a[l],缓存变量是 z [ l ] z^{[l]} z[l]。其表达式如下:
z [ l ] = W [ l ] a [ l − 1 ] + b [ l ] z^{[l]}=W^{[l]}a^{[l-1]}+b^{[l]} z[l]=W[l]a[l−1]+b[l]
a [ l ] = g [ l ] ( z [ l ] ) a^{[l]}=g^{[l]}(z^{[l]}) a[l]=g[l](z[l])
m m m个训练样本的形态下,向量化形式为:
Z [ l ] = W [ l ] A [ l − 1 ] + b [ l ] Z^{[l]}=W^{[l]}A^{[l-1]}+b^{[l]} Z[l]=W[l]A[l−1]+b[l]
A [ l ] = g [ l ] ( Z [ l ] ) A^{[l]}=g^{[l]}(Z^{[l]}) A[l]=g[l](Z[l])
6.2 反向传播过程
输入是 d a [ l ] da^{[l]} da[l],输出是 d a [ l − 1 ] da^{[l-1]} da[l−1]、 d W [ l ] dW^{[l]} dW[l]、 d b [ l ] db^{[l]} db[l]。其表达式如下:
d z [ l ] = d a [ l ] ∗ g [ l ] ′ ( z [ l ] ) dz^{[l]}=da^{[l]}\ast g^{[l]\prime}(z^{[l]}) dz[l]=da[l]∗g[l]′(z[l])
d W [ l ] = d z [ l ] ⋅ a [ l − 1 ] dW^{[l]}=dz^{[l]}\cdot a^{[l-1]} dW[l]=dz[l]⋅a[l−1]
d b [ l ] = d z [ l ] db^{[l]}=dz^{[l]} db[l]=dz[l]
d a [ l − 1 ] = W [ l ] T ⋅ d z [ l ] da^{[l-1]}=W^{[l]T}\cdot dz^{[l]} da[l−1]=W[l]T⋅dz[l]
由上述第四个表达式可得 d a [ l ] = W [ l + 1 ] T ⋅ d z [ l + 1 ] da^{[l]}=W^{[l+1]T}\cdot dz^{[l+1]} da[l]=W[l+1]T⋅dz[l+1],将 d a [ l ] da^{[l]} da[l]代入第一个表达式中可以得到:
d z [ l ] = W [ l + 1 ] T ⋅ d z [ l + 1 ] ∗ g [ l ] ′ ( z [ l ] ) dz^{[l]}=W^{[l+1]T}\cdot dz^{[l+1]}\ast g^{[l]\prime}(z^{[l]}) dz[l]=W[l+1]T⋅dz[l+1]∗g[l]′(z[l])
该式非常重要,反映了 d z [ l + 1 ] dz^{[l+1]} dz[l+1]与 d z [ l ] dz^{[l]} dz[l]的递推关系。
m m m个训练样本的形态下,向量化形式为:
d Z [ l ] = d A [ l ] ∗ g [ l ] ′ ( Z [ l ] ) d Z^{[l]}=d A^{[l]}\ast g^{[l]\prime} (Z^{[l]}) dZ[l]=dA[l]∗g[l]′(Z[l])
d W [ l ] = 1 m d Z [ l ] ⋅ A [ l − 1 ] T dW^{[l]}=\frac1mdZ^{[l]}\cdot A^{[l-1]T} dW[l]=m1dZ[l]⋅A[l−1]T
d b [ l ] = 1 m n p . s u m ( d Z [ l ] , a x i s = 1 , k e e p d i m = T r u e ) db^{[l]}=\frac1mnp.sum(dZ^{[l]},axis=1,keepdim=True) db[l]=m1np.sum(dZ[l],axis=1,keepdim=True)
d A [ l − 1 ] = W [ l ] T ⋅ d Z [ l ] dA^{[l-1]}=W^{[l]T}\cdot dZ^{[l]} dA[l−1]=W[l]T⋅dZ[l]
d Z [ l ] = W [ l + 1 ] T ⋅ d Z [ l + 1 ] ∗ g [ l ] ′ ( Z [ l ] ) dZ^{[l]}=W^{[l+1]T}\cdot dZ^{[l+1]}\ast g^{[l]\prime}(Z^{[l]}) dZ[l]=W[l+1]T⋅dZ[l+1]∗g[l]′(Z[l])
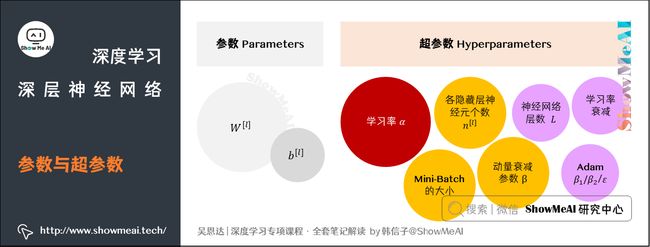
7.参数与超参数

神经网络中有两个大家要重点区分的概念:参数(parameters)和超参数(hyperparameters)。
- 神经网络中的参数就是我们熟悉的 W [ l ] W^{[l]} W[l]和 b [ l ] b^{[l]} b[l]。
- 神经网络的超参数是例如学习率 α \alpha α,训练迭代次数 N N N,神经网络层数 L L L,各层神经元个数 n [ l ] n^{[l]} n[l],激活函数 g ( z ) g(z) g(z)等。
- 之所以叫做超参数,是因为它们需要提前敲定,而且它们会决定参数 W [ l ] W^{[l]} W[l]和 b [ l ] b^{[l]} b[l]的值。
如何设置最优的超参数是一个比较困难的、需要经验知识的问题。通常的做法是选择超参数一定范围内的值,分别代入神经网络进行训练,测试cost function随着迭代次数增加的变化,根据结果选择cost function最小时对应的超参数值。这类似于机器学习中的实验验证的方法。(关于机器学习的模型评估详见 ShowMeAI文章图解机器学习 | 模型评估方法与准则)
8.神经网络vs人脑

神经网络跟人脑机制到底有什么联系呢?究竟有多少的相似程度?
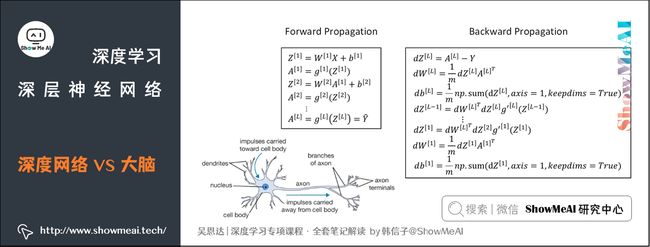
我们前面看到神经网络实际上可以分成两个部分:前向传播过程和反向传播过程。神经网络的每个神经元采用激活函数的方式,类似于感知机模型。这种模型与人脑神经元是类似的,但是一种非常简化的人脑神经元模型。
人脑神经元可分为树突、细胞体、轴突三部分。树突接收外界电刺激信号(类比神经网络中神经元输入),传递给细胞体进行处理(类比神经网络中神经元激活函数运算),最后由轴突传递给下一个神经元(类比神经网络中神经元输出)。

人脑神经元的结构和处理方式要复杂的多,神经网络模型只是非常简化的模型。
人脑如何进行学习?是否也是通过反向传播和梯度下降算法现在还不清楚,可能会更加复杂。这是值得生物学家探索的事情。
参考资料
- 图解机器学习 | 模型评估方法与准则
ShowMeAI系列教程推荐
- 大厂技术实现:推荐与广告计算解决方案
- 大厂技术实现:计算机视觉解决方案
- 大厂技术实现:自然语言处理行业解决方案
- 图解Python编程:从入门到精通系列教程
- 图解数据分析:从入门到精通系列教程
- 图解AI数学基础:从入门到精通系列教程
- 图解大数据技术:从入门到精通系列教程
- 图解机器学习算法:从入门到精通系列教程
- 机器学习实战:手把手教你玩转机器学习系列
- 深度学习教程:吴恩达专项课程 · 全套笔记解读
- 自然语言处理教程:斯坦福CS224n课程 · 课程带学与全套笔记解读
- 深度学习与计算机视觉教程:斯坦福CS231n · 全套笔记解读
推荐文章
- ShowMeAI 深度学习教程(1) | 深度学习概论
- ShowMeAI 深度学习教程(2) | 神经网络基础
- ShowMeAI 深度学习教程(3) | 浅层神经网络
- ShowMeAI 深度学习教程(4) | 深层神经网络
- ShowMeAI 深度学习教程(5) | 深度学习的实用层面
- ShowMeAI 深度学习教程(6) | 神经网络优化算法
- ShowMeAI 深度学习教程(7) | 网络优化:超参数调优、正则化、批归一化和程序框架
- ShowMeAI 深度学习教程(8) | AI应用实践策略(上)
- ShowMeAI 深度学习教程(9) | AI应用实践策略(下)
- ShowMeAI 深度学习教程(10) | 卷积神经网络解读
- ShowMeAI 深度学习教程(11) | 经典CNN网络实例详解
- ShowMeAI 深度学习教程(12) | CNN应用:目标检测
- ShowMeAI 深度学习教程(13) | CNN应用:人脸识别和神经风格转换
- ShowMeAI 深度学习教程(14) | 序列模型与RNN网络
- ShowMeAI 深度学习教程(15) | 自然语言处理与词嵌入
- ShowMeAI 深度学习教程(16) | Seq2seq序列模型和注意力机制
