嵌入式分享合集66
一、RISC-V将做为航天计算芯片
这个就像个广告哦~~ 就是看见了 发来一下
RISC-V,真的要上天了!
因为美国知名的RISC-V芯片设计厂商SiFive宣布:
NASA选中RISC-V,作为下一代高性能航天计算 (HPSC) 提供核心CPU。

SiFive声称,该处理器将提供至少100倍于当前航天计算机的算力,且将适用于从行星探索到月球和火星表面任务的所有类型的未来太空任务。
消息一传出,有网友表示惊讶:还以为NASA会选择一个已被检验过的CPU,没想到选了RISC-V。
那么这一选择背后的考量是怎样呢?赶紧来看看。
为什么会选RISC-V?
首先,让我们认识一下RISC-V芯片的载体——HPSC。
HPSC,是NASA正在打造的下一代高性能航天计算,其目标是取代老化的基于PowerPC的BAE系统的RAD750单板计算机。
美国宇航局高级航空电子设备首席技术专家Wesley Powell对此表示:
我们目前的航天计算机是近30年前开发的,虽然它们在过去的任务中表现出色,但未来的NASA任务需要显着提高机载计算能力和可靠性。
新的计算处理器将提供性能、容错性和灵活性所需的进步,以满足这些未来的任务需求。
正是基于此,符合这些条件的RISC-V也就顺势而出了。
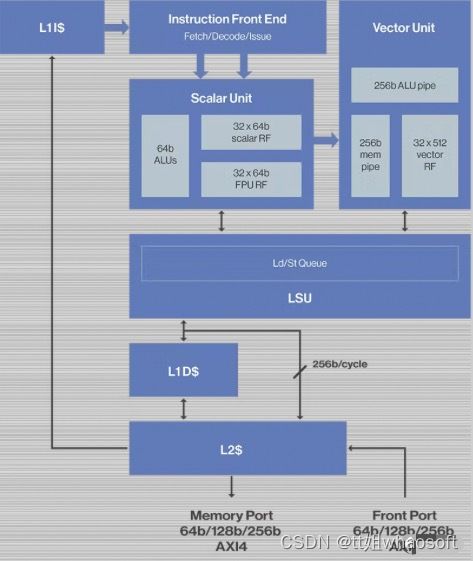
据SiFive官网介绍,除了4个通用的SiFive RISC-V内核,HPSC还将使用8核的SiFive X280 RISC-V矢量核。
X280,是一个多核、多集群能力的 RISC-V处理器,提供了对RISC-V矢量扩展标准和SiFive智能扩展的全面支持,并针对边缘的AI/ML计算进行了优化。
这也意味着,X280在拥有比标准RISC-V内核高六倍的性能时,还能保持平台的低功耗。
此之外,在纯粹的性能外,用于外太空的芯片还必须可以应对恶劣的操作条件,而新的容错处理器正是X280的特点之一。
最后,也可能是最重要的,是RISC-V的开源属性。
根据SiFive业务发展高级副总裁Jack Kang的说法,RISC-V架构是最有可能在10年、15年甚至20年后拥有大量开发人员基础的架构之一,因此选择RISC-V将是NASA的一个安全赌注。
综上所述,高性能、低功耗、容错属性和长使用寿命,RISC-V能荣升宇航级应用也就不奇怪了。
关于SiFive
这次被NASA选中的公司SiFive,是一家处理器内核、AI加速器和SoC IP供应商,由加州大学伯克利分校教授、RISC-V创始人之一Krste Asanovic,和他的两名研究生共同创立。

虽然这家公司2015年才成立,但在短短几年时间里,已经发展成全球首家基于RISC-V定制化的半导体企业,其RISC-V架构处理器有超过100项专利。
今年3月更是宣布获得Coatue Management领投的1.75亿美元F轮融资,公司估值超过25亿美元,成为了RISC-V芯片阵营首个“独角兽”。 whaosoft aiot http://143ai.com
对于此次被NASA选中,SiFive业务发展高级副总裁Jack Kang表示:
我们一直说,SiFive的未来没有限制,我们很高兴看到我们创造的影响力远远超出了我们的星球。
二、Buck电路
这个电路简洁而不简单
Buck、Boost、Buck-Boost作为直流开关电源中应用广泛的拓扑结构,属于非隔离的直流变换器。本期内容小编将对其中的Buck电路展开详细介绍。
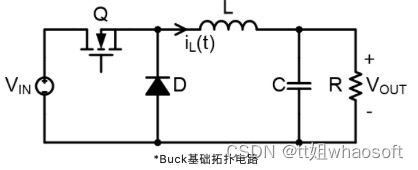
降压式(Buck)变换器是一种输出电压≤输入电压的非隔离直流变换器。Buck变换器的主电路由开关管Q,二极管D,输出滤波电感L和输出滤波电容C构成。
接下来将从:1. 开关整流器基本原理 2. 传说中的“伏-秒平衡” 3. 同步整流死区时间等三部分详细介绍Buck电路的工作原理。
让我们打起精神,擦亮眼睛,深刻体会简洁而不简单的Buck电路吧!
Part 1 开关整流器基本原理

在[0,Ton]期间,开关导通;在[Ton,Ts]期间,Q截止。设开关管开关周期为Ts,则开关频率fs=1/Ts。导通时间为Ton,关断时间为Toff,则Ts=Ton+Toff。设占空比为D,则D=Ton/Ts。改变占空比D,即改变了导通时间Ton的长短,这种控制方式成为脉冲宽度调制控制方式(Pulse Width Modulation, PWM)。

Buck电路特征
• 输出电压≤输入电压
• 输入电流断续
• 输出电流连续
• 需要输出滤波电感L和输出滤波电容C
Part 2 传说中的“伏-秒平衡”

伏秒原则,又称伏秒平衡,是指开关电源稳定工作状态下,加在电感两端的电压乘以导通时间等于关断时刻电感两端电压乘以关断时间,或指在稳态工作的开关电源中电感两端的正伏秒值等于负伏秒值。
在一个周期 T 内, 电感电压对时间的积分为 0,称为伏秒平衡原理。正如本文开头视频中指出,任何稳定拓扑中的电感都是传递能量而不消耗能量, 都会满足伏秒平衡原理。
Part 3 同步整流死区时间
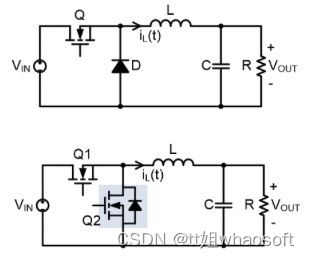
同步整流是采用极低导通电阻的的MOSFET来取代二极管以降低损耗的技术,大大提高了DCDC的效率。
物理特性的极限使二极管的正向电压难以低于0.3V。对MOSFET来说,可以通过选取导通电阻更小的MOSFET来降低导通损耗。
在开关电源系统中,死区时间(Dead Time)是指为了避免两个晶体管开关同时导通而引入的屏蔽时间。
连接的两个晶体管开关通过交互地闭合和关断来决定线圈中电流的增减。为避免两个晶体管同时导通造成不必要的电流浪涌,即需控制电路在开关动作引入死区特性。在死区时间内,需要完成对已导通晶体管的关断和另一晶体管的导通。

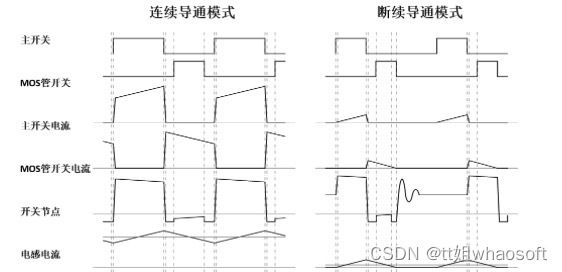
死区时间
• 设置必要的死区时间以防止短路。
• 死区时间越小,体二极管传导越少。
• 死区时间越小,损耗越小,效率越高。
三、电烙铁焊锡有没有毒
电烙铁焊锡有毒吗?
有网友吐槽称,他在PCB工厂用电烙铁焊锡一年整了,都感觉到身体开始不舒服了,腹部有点胀,焊锡有毒吗?是不是会铅中毒。
其实这个还要看工作中用电烙铁焊锡的有铅焊锡丝还是无铅,并需要定期检查血铅,没有超标就完全不会有问题的,焊锡有毒吗?
正常来讲如果按照国家标准进行防护与原材料采购,焊锡是不会造成重大伤害的。现在基本上都是使用无铅的产品了。
铅是一种有毒物质,人体吸收过量会引起铅中毒,摄入低剂量可能会对人的智力、神经系统和生殖系统造成影响。
锡与铅的合金,就是常用的焊锡,它具有金属良好的导电性,溶点又低,所以,长期以来用于焊接工艺。它的毒性主要来自铅。焊锡所产生的铅烟容易导致铅中毒。
金属铅可能产生铅化合物,全被归类为危险物质,在人体中铅会影响中枢神经系统及肾脏。
铅对一些生物的环境毒性已被普遍证实。血液铅浓度达10μg/dl以上就会产生敏感的生化效应,若长期曝露使血液铅浓度超过60~70μg/dl就会造成临床铅中毒。
有铅的肯定是有毒的,先别说焊锡对身体影响大不大,就是一般的金属,多了也会中毒,焊锡的时候,会有烟雾出现,里面含有一种对身体有害的元素。
工作的时候,最好是带口罩, 但是多多少少还是会有点影响,当然如果能用无铅焊锡丝, 会比有铅的,要安全的多。
无铅焊锡有毒吗?
用电烙铁焊锡的材料焊锡丝,它虽然主要成份是锡,但也含有其他金属。主要分为有铅和无铅(即环保型)。随着欧盟ROHS标准的出台,现在越来越多的PCB焊接工厂选择了无铅环保型的,有铅焊锡丝也在慢慢被替用,不是环保的出不了口。无铅锡膏,无铅锡丝,无铅锡条是目前市场上的主要产品。
简单来说:一般用的焊锡因为熔点低,含铅60%、含锡40%左右,所以焊锡本身是有毒性的。而市场上大部分的焊锡都是中空的,内装有松香,所以你所说的气体,估计是焊接时焊锡内的松香熔化时所挥发出来的。
松香挥发出来的气体也是有些微毒性的,这种气体挺难闻的。焊锡在焊接时最主要的危害因素是铅烟,哪怕是无铅焊锡,其中多少都含有一定的铅。
铅烟在GBZ2-2002中的限值很低,毒性很大,需重点防护。由于焊接过程对人体和环境的破坏,在欧洲,对焊接工人的保护及对环境的保护已以立法的形式强制执行,在没有如何防护措施的条件下进行焊接是不允许的。在ISO14000标准中对生产环节产生的污染进行处理和防护有明确的规定。
锡都含有铅,以前焊锡丝内有铅把焊锡归类为职业危害岗位(在国家职业病目录中);现在我们一般企业都使用无铅焊锡丝了,主要成分是锡,疾病预防控制中心测的是二氧化锡;并不在国家职业病目录中。
无铅工艺(leadfree)一般来说铅烟是不会超标的,但是焊锡还存在其他的危害了,比如助焊剂(松香类物质)有一定的危害,得视具体情况来来看。员工平时可以看一下配发下来的锡是什么标识的,是属于哪一类的,这样可以有据可查及要求企业整改(可以提意见给工厂内部工会)。
要是配的锡是含铅的,肯定是对身体有害的。时间长了,它们在身体积累,对神经系统免疫破坏很大的。
无铅焊锡丝是环保的,但是无铅焊锡丝对人体也有害,无铅焊锡丝的铅含量低并不是不含铅,和含铅的焊锡丝相比,无铅焊锡丝对环境和人体的污染比含铅的要小。焊锡时产生的气体是有毒的,有松香油、氯化锌等气体蒸气产生。
电烙铁焊锡丝有毒怎么防范?
首先PCB工厂在用电烙铁焊锡焊接元器件时要使用ROHS的锡丝,并要做好防范工作:
比如带手套、口罩或防毒面具,工作场所注意通风,排风系统好,工作后注意清洗,喝牛奶的方法也是可以预防焊锡中的铅毒性的。
1、要休息一段时间,一般1小时要休息15分钟左右,缓解疲劳,因为疲劳时抵抗力最差。
2、少抽烟 多喝水 这样在白天可以排除大部分吸收的有害物质。
3、睡前饮绿豆汤或者蜂蜜水 这样可降火 对心情有帮助 而且绿豆和蜂蜜可以排除吸收的大量的铅和辐射。
4、可把烙铁搞的亮一点,尽量用PPD的焊头,这样温度达到了可以少用焊油和松香,减轻对身体的危害,
5、焊油焊锡冒烟时候尽量头向边上偏点 刷天那水时候也要把头偏到边上点 尽量屏住呼吸。
6、多用酒精,用酒精多刷一会效果差不多的。
7、焊接完要洗干净手。
8、睡觉前洗澡尽量早睡早起,保证充足的睡眠,只要睡的好,杂质基本都可随身体排出。
9、带口罩工作。
四、PID
这个之前发过 再来一遍 可好
PID,就是“比例(proportional)、积分(integral)、微分(derivative)”,是一种很常见的控制算法。
PID已经有107年的历史了
它并不是什么很神圣的东西,大家一定都见过PID的实际应用。
比如四轴飞行器,再比如平衡小车......还有汽车的定速巡航、3D打印机上的温度控制器....
就是类似于这种:需要将某一个物理量“保持稳定”的场合(比如维持平衡,稳定温度、转速等),PID都会派上大用场。
那么问题来了:
比如,我想控制一个“热得快”,让一锅水的温度保持在50℃,这么简单的任务,为啥要用到微积分的理论呢
你一定在想:
这不是so easy嘛~ 小于50度就让它加热,大于50度就断电,不就行了?几行代码用Arduino分分钟写出来。
没错~在要求不高的情况下,确实可以这么干~ But!如果换一种说法,你就知道问题出在哪里了:
如果我的控制对象是一辆汽车呢?
要是希望汽车的车速保持在50km/h不动,你还敢这样干么。
设想一下,假如汽车的定速巡航电脑在某一时间测到车速是45km/h。它立刻命令发动机:加速!
结果,发动机那边突然来了个100%全油门,嗡的一下,汽车急加速到了60km/h。
这时电脑又发出命令:刹车!
结果,吱...............哇............(乘客吐)
所以,在大多数场合中,用“开关量”来控制一个物理量,就显得比较简单粗暴了。有时候,是无法保持稳定的。因为单片机、传感器不是无限快的,采集、控制需要时间。
而且,控制对象具有惯性。比如你将一个加热器拔掉,它的“余热”(即热惯性)可能还会使水温继续升高一小会。
这时,就需要一种『算法』:
-
它可以将需要控制的物理量带到目标附近
-
它可以“预见”这个量的变化趋势
-
它也可以消除因为散热、阻力等因素造成的静态误差
-
....
于是,当时的数学家们发明了这一历久不衰的算法——这就是PID。
你应该已经知道了,P,I,D是三种不同的调节作用,既可以单独使用(P,I,D),也可以两个两个用(PI,PD),也可以三个一起用(PID)。
这三种作用有什么区别呢?客官别急,听我慢慢道来
我们先只说PID控制器的三个最基本的参数:kP,kI,kD。
kP
P就是比例的意思。它的作用最明显,原理也最简单。我们先说这个:
需要控制的量,比如水温,有它现在的『当前值』,也有我们期望的『目标值』。
-
当两者差距不大时,就让加热器“轻轻地”加热一下。
-
要是因为某些原因,温度降低了很多,就让加热器“稍稍用力”加热一下。
-
要是当前温度比目标温度低得多,就让加热器“开足马力”加热,尽快让水温到达目标附近。
这就是P的作用,跟开关控制方法相比,是不是“温文尔雅”了很多
实际写程序时,就让偏差(目标减去当前)与调节装置的“调节力度”,建立一个一次函数的关系,就可以实现最基本的“比例”控制了~
kP越大,调节作用越激进,kP调小会让调节作用更保守。
要是你正在制作一个平衡车,有了P的作用,你会发现,平衡车在平衡角度附近来回“狂抖”,比较难稳住。
如果已经到了这一步——恭喜你!离成功只差一小步了~
kD
D的作用更好理解一些,所以先说说D,最后说I。
刚才我们有了P的作用。你不难发现,只有P好像不能让平衡车站起来,水温也控制得晃晃悠悠,好像整个系统不是特别稳定,总是在“抖动”。
你心里设想一个弹簧:现在在平衡位置上。拉它一下,然后松手。这时它会震荡起来。因为阻力很小,它可能会震荡很长时间,才会重新停在平衡位置。
请想象一下:要是把上图所示的系统浸没在水里,同样拉它一下 :这种情况下,重新停在平衡位置的时间就短得多。
我们需要一个控制作用,让被控制的物理量的“变化速度”趋于0,即类似于“阻尼”的作用。
因为,当比较接近目标时,P的控制作用就比较小了。越接近目标,P的作用越温柔。有很多内在的或者外部的因素,使控制量发生小范围的摆动。
D的作用就是让物理量的速度趋于0,只要什么时候,这个量具有了速度,D就向相反的方向用力,尽力刹住这个变化。
kD参数越大,向速度相反方向刹车的力道就越强。
如果是平衡小车,加上P和D两种控制作用,如果参数调节合适,它应该可以站起来了~欢呼吧
等等,PID三兄弟好像还有一位。看起来PD就可以让物理量保持稳定,那还要I干嘛?
因为我们忽视了一种重要的情况:
kI
还是以热水为例。假如有个人把我们的加热装置带到了非常冷的地方,开始烧水了。需要烧到50℃。
在P的作用下,水温慢慢升高。直到升高到45℃时,他发现了一个不好的事情:天气太冷,水散热的速度,和P控制的加热的速度相等了。
这可怎么办?
-
P兄这样想:我和目标已经很近了,只需要轻轻加热就可以了。
-
D兄这样想:加热和散热相等,温度没有波动,我好像不用调整什么。
于是,水温永远地停留在45℃,永远到不了50℃。
作为一个人,根据常识,我们知道,应该进一步增加加热的功率。可是增加多少该如何计算呢?
前辈科学家们想到的方法是真的巧妙。
设置一个积分量。只要偏差存在,就不断地对偏差进行积分(累加),并反应在调节力度上。
这样一来,即使45℃和50℃相差不太大,但是随着时间的推移,只要没达到目标温度,这个积分量就不断增加。系统就会慢慢意识到:还没有到达目标温度,该增加功率啦!
到了目标温度后,假设温度没有波动,积分值就不会再变动。这时,加热功率仍然等于散热功率。但是,温度是稳稳的50℃。
kI的值越大,积分时乘的系数就越大,积分效果越明显。
所以,I的作用就是,减小静态情况下的误差,让受控物理量尽可能接近目标值。
I在使用时还有个问题:需要设定积分限制。防止在刚开始加热时,就把积分量积得太大,难以控制。
PID到底怎么调?
PID参数调整口诀:
参数整定找最佳,从小到大顺序查
先是比例后积分,最后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢。微分时间应加长
理想曲线两个波,前高后低四比一
一看二调多分析,调节质量不会低
若要反应增快,增大P减小I
若要反应减慢,减小P增大I
如果比例太大,会引起系统震荡
如果积分太大,会引起系统迟钝