运动规划-深蓝学院-高飞
运动规划
- 正文
- 一
-
- 课程介绍
- outline:
- map
- 参考资源
- 二
-
- 基于搜索
-
- Dijkstra
- A*
- grid based path search
- 跳点jump point search
- 采样算法
-
- 概率路线图prm
- 快速搜索随机数 rrt
- 三
-
- 带动力学约束的运动规划
- state lattice
-
- boundary value problem
- hybrid a*
- kinodynamic rrt*
- 四
-
- minimum snap
-
- 多项式轨迹
- close form solution
-
- implementation
- 四
-
- 轨迹优化 硬约束
-
- bezier curve optimization
- dense constraint
- mixed integer optimization
- 软约束
- planning strategy
- 五
-
- MDP based path planning
-
- uncertainty in planning
- planning with uncertainty
- Markov Decision Process
- Solving MDP
-
- RTDP 实时动态规划
- minimax cost
- expected cost
- 六
-
- MPC 模型预测控制
- optimization
- tube based MPC
正文
课程视频:运动规划B站
课程资料:运动规划git
一
课程介绍
机器人具备:
状态估计
感知
规划
控制
motion planning ?
安全:无碰撞
柔顺:节能,舒适,某种最优
动力学可行:控制闭环可执行
怎么做研究:
- 发现问题:
解决实际问题,不是空想的场景;be engineer ,熟悉机器人;不追热点;诚实实际 - 解决问题:
仿真有限,上实物证明算法;
overall knowledge:
不同场景选择合适的方法;设计customized strategy
dirty work :
不要等,动手自己做,实验验证
熟悉整个系统
机器人的所有component都考虑到
outline:
基于搜索
图搜索、dijkstra, A*、跳点
基于采样
PRM, RRT, RRT*, 改进版
考虑动力学的
两点边界值最优控制问题、state lattice, kinodynamic rrt * , hybrid A*
back-end :trajectory optimization
minimum snap
map
栅格地图grid map
八叉树地图 octomap , sparse , structural, 非直接索引递归查询
voxel hashing,
point cloud map
TSDF, truncated signed distance functions
ESDF, euclidean signed distance functions
参考资源
二
基于搜索
在工作空间中,机器人有形状和大小,在配置空间(configuration space)是一个点,易于规划运动。
障碍物膨胀处理,将机器人看为质点。
图:节点和边;有向图和无向图;边的权重/代价;
搜索总是从起始状态点开始,向目标节点形成连接,形成树状结构。
维护一个container容器,存储所有有效节点
循环:
访问容器内的节点,延伸向其邻节点加入容器,
-
广度优先搜索BFS
队列,先进先出
弹出最浅的节点进行延伸,一层一层frontier推进 -
深度优先搜索DFS
堆栈,后进先出
先弹出(选择并延伸)最深的节点(一条路上最后的节点继续延伸)
先顺时针后逆时针(自己定义一个循环选择策略) -
贪心算法greedy beset first search
根据人为定义的启发式规则(对目标距离的猜测)指引方向
优先向距离更近的邻节点延伸
在障碍物环境中陷入局部最优
Dijkstra
策略:累计代价最低的节点先被选择向外延伸
通用循环:弹出-》拓展-》压入堆栈
优先级队列数据结构:自动排序,自动弹出代价最小的节点。
从初始容器弹出节点,延伸新节点加入队列,弹出节点加入另一个容器(被延伸过的)
新节点加入时赋予其由总代价= 父节点代价+父子边代价,如新节点在队列中,比较新旧代价,使队列中节点代价变小。
A*
dijkstra结合贪心:
累积代价gn:当前节点到起点的代价
启发函数hn:当前节点到目标节点的估计代价。
fn = gn + hn
根据fn队列排序,弹出fn最小的节点
新节点的gn是累加的=从起点到该节点的边代价之和,fn是独立的
问题:估计代价并不是实际代价,会影响路径选择。估计代价要小于实际代价,保持最终路径的最优性。
估计代价:欧氏距离,曼哈顿距离
grid based path search
栅格地图结构化highly structural
理想的启发式函数规则
运动规划:前段路径搜索+后端轨迹生成
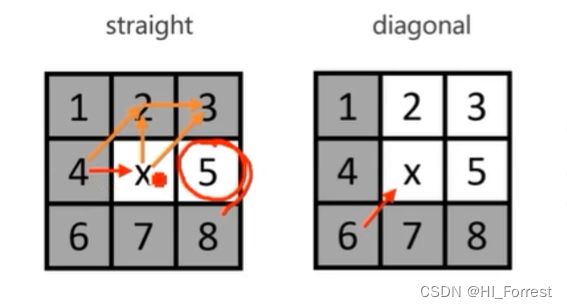
跳点jump point search
跳点算法
找到搜索的对称性并打破它,找特殊点
inferior neighbor
natural neighbor
forced neighbor
straight pruning
diagonal pruning
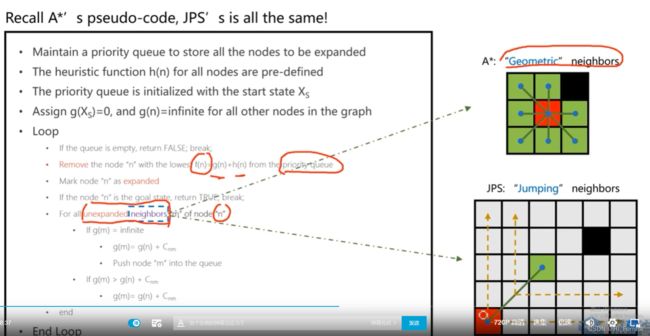
A* 几何邻居加入openlist
JPS 将特殊点加入openlist
采样算法
概率路线图prm
建图阶段:距离准则和障碍物准则
寻路阶段:搜索图中的路径连线
快速搜索随机数 rrt
随机采样Xrand
找树中最近点Xnear
steer延伸一个步长到Xnew
连接Xnear–> Xnew
碰撞检测边的有效性
有则加入树无则(略,减距离加)
优势:快,可行路径
kdtree:
改进Xnear 找最近点的过程
narrow passage:
rrtconnect ,双向搜索
改进采样过程
三
带动力学约束的运动规划
pipeline : mission - > path finding -> trajectory optimization -> execution
前端考虑动力学,后端轨迹优化难度降低,轨迹优化是局部的
topology,轨迹优化不能改变路径的拓扑结构
考虑动力学和不考虑动力学的路径在地图中是属于不同的拓扑结构,后端的轨迹优化只能在同拓扑结构内优化平滑?不能跳跃到其余拓扑结构中。
state lattice
图搜索是已解决的问题,不再考虑。
不满足于机器人是一个质点。
新的需求:路线图中的边是feasible motion connection, 可行的运动过程。
如何产生executable edge:
- 正向,离散控制量:
- 反向,离散状态量:
-
控制空间的离散sample,a* 等grid search based, control, action, 在某个状态时采取不同的control量, 从而,到达新的状态量。
-
状态空间离散,sample based, prm , rrt, 先离散采样状态,再产生控制过程去连接两个状态。
-
从一个状态选取不同的控制量(油门大小,方向盘方向,给系统的输入)车的位置和朝向是状态。
fixed u,T, 一个时间步内控制量u恒定, T之后积分到下一个状态。简单易于实现,没有任务 导向,规划效率低。 -
从状态S0 到 S1, 分配时间T, 计算过程控制量u, 有任务导向,难implement,效率高。
状态转移方程,从s0转移到s1 的控制过程。
现代控制理论!
幂零矩阵?
state lattice 第一层需要考虑初始状态和速度,第一层的过程不一样,之后的状态转移控制过程都一致,外层间的过程一样。
boundary value problem
状态空间采样后,计算可行的连接控制过程。
庞特里亚金极小值原理?
costate 协态变量, 哈密尔顿函数。
final state 的惩罚(误差函数)
+
transition cost 过程代价函数
启发函数:
无碰撞,考虑动力学可行,两个代价函数结合。
hybrid a*
dense lattice costs too much time .
prune nodes using grid map.
栅格法剪枝,每格留一个最优(代价最低,control cost, 不只是欧氏距离代价)节点。
- 欧氏距离
- 非完整约束动力学约束及无碰撞
- 质点模型欧氏距离+动力学非完整约束无碰撞
控制空间采样离散低效率,加入one shot 状态空间采样(终点)直接求解某已有状态到终点的最优控制问题。
kinodynamic rrt*
状态空间采样,解(最优)两点边界值问题(O)BVP,形成状态之间的连接,构成搜索树。
四
无人机的运动规划12个状态量,微分平坦为4个量的规划过程。对姿态只有偏航角需要规划,
线速度角速度都用【x,y,z,theta】的微分表示。
参考论文2011 ICRA
无人机的规划过程:
minimum snap
多项式轨迹
boundary condition,初始终止 位置,速度,加速度确定
六变量用五次多项式六参数。
多段轨迹连续:
带速度通过via point
速度不能指定,而是用优化方法确定一个最优的速度加速度值。
段数越多,多项式次数可以降低:
代价函数J:
矩阵形式的约束
首位的位置速度加速度加加速度等式约束。
中间点的位置约束
相邻两段轨迹的速度加速度加加速度的连续约束。
fk’(tf) = fk+1 ’ (t0)
典型凸优化问题,二次规划问题
hessian 矩阵对角矩阵
disciplined convex optimization programs
tools :
linear programming;
quadratic programming;
quadratically constrained qp;
second order cone programming;
semidefinite programming;
formulation .
close form solution
decision variable mapping.
将多项式系数映射到端点物理参数。
重要
implementation
-
solver :
cvx
mosek
ooqp
glpk -
numerical stability
全局时间轴太长造成数值计算不稳定,高阶多项式。
方案:每段轨迹归一化到时间0-1, 求出多项式后再进行放缩。
四
minimum snap 只约束了way point上的约束,中间过程没有约束(障碍物信息不考虑,只优化指标)
硬约束,满足约束subject to 。
软约束,最优化指标函数,倾向于满足约束范围。不一定严格满足。
轨迹优化 硬约束
corridor-based trajectory optimization
栅格化自由空间,栅格膨胀简化。
轨迹连接点处于两个栅格的重叠区域,满足走廊约束。
instant linear constraint:
首位状态约束;中间点约束;连续性约束。
interval linear constraint:
边界约束boundary constraint;
动力学约束 速度加速度连续可达。
problem:
way point 上面满足约束,如何保证全局满足约束?
iteratitvely check 检查轨迹极值是否超出约束,超出则添加中间点使轨迹被压入约束内。
检查极值点是否超出约束?
多项式求极值问题,伴随矩阵的秩 求多项式根。
eigenvalue.
bezier curve optimization
贝塞尔曲线,way point 作为控制点,全局满足约束 bernstein.
一定起始于起点,终止于最后一个点,中间控制点不通过。
贝塞尔曲线的凸包性质,贝塞尔曲线各段,都在控制点构成的凸包内,因此不会发生碰撞。
位置贝塞尔,速度贝塞尔曲线。
边界约束;
连续性约束,前后段的尾首控制点相同,则连续。
dense constraint
稠密约束
mixed integer optimization
软约束
硬约束:障碍物和自由空间两种平均分布的空间,自由空间内没有障碍物距离概念,对感知反馈的噪音敏感。
软约束:考虑到障碍物的距离
vision based drone:
感知范围有限,有噪音。
planning strategy
五
多路径,最优路径的选择
MDP based path planning
uncertainty in planning
markov decision process 马尔科夫决策过程
目前的假设:
执行是完美无误差的,没有扰动
完美的反馈,状态估计准确
实际上:存在uncertainty
planning with uncertainty
- decision maker (game player)
1.1 robot
1.2 nature - nature + robot actions = ?
代价函数 衡量 nature 参与下 robot 动作的 共同结果- nature的动作对机器人是未知,假设是最差的扰动。
- 在概率模型下,nature的动作可预测=动作的期望
cost function is a metrics that evaluate all possible plans(or paths)
Markov Decision Process
S / X state space
A / U action space
P state transition function under probabilistic model
R / L immediate reward / negative one-step cost
theta: nature 的action, 隐式函数或者显式定义值。
l:cost function, 简单定义为 欧式距离
worst case analysis for nondeterministic model
最小化最差情况代价
expected case analysis for probabilistic model
最小化期望代价
Solving MDP
RTDP 实时动态规划
计算代价(cost to go )需要小于等于实际代价
- 流程:
- 初始化所有状态点的G值(cost value)
- 按greedy policy 随机选取输出
- backup 所有经过的点
- 重复迭代,所有状态的bellman error 小于阈值
- 例子
X 初始化范围
Xl, Xf, 初始状态和目标状态
U robot的动作,上下左右
θ nature的动作。uncertainty意外的几率。
cost function : 每一步的代价 一样 都是 -1
goal : find an optimal plan from Xl to Xf.
decision making, 和强化学习。
minimax cost
不确定性的规划中,在机器人在某确定状态下实施动作,由于nature 的动作影响,其输出状态不确定。
minimize (max (cost to go)) of all states.
状态维度爆炸,难直接求解
- 动态规划:
在Uk集合中选择最好的动作,使得Xi 在最坏的θ 环境动作下,最小化cost到达Xf.

robust to uncertainty
overly pessimistic
harder to compute than normal paths
expected cost
probabilistic model
六
MPC 模型预测控制
- 模型model
系统模型:运动学公式
问题模型:最优化指标函数 - 预测prediction
状态空间
输入空间(控制空间)
参数空间 - 控制control
选取最优的control process
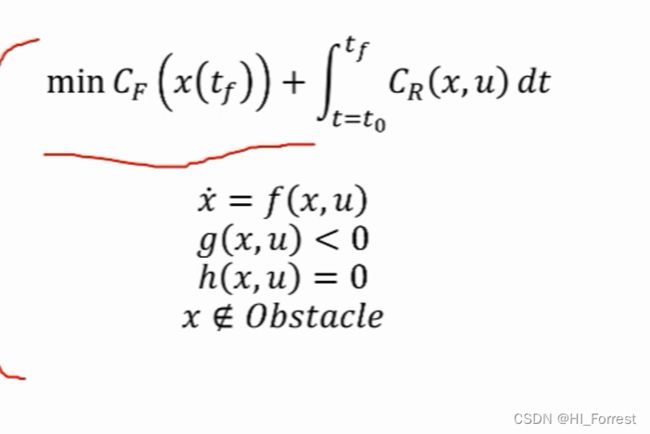
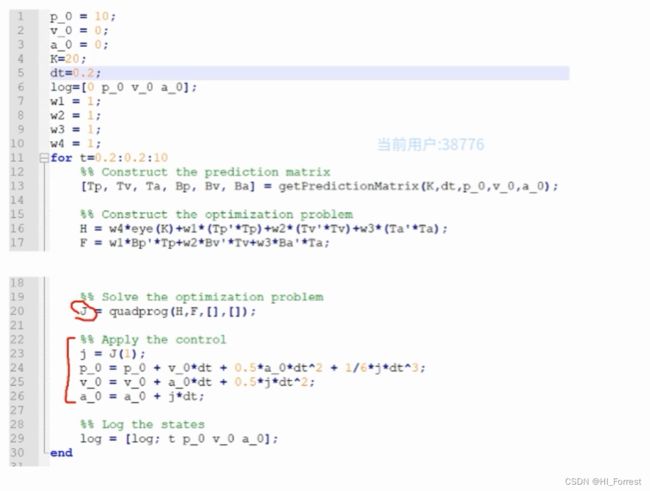
optimization
图搜索
随机搜索
凸优化:二次规划
非凸优化:连续二次规划
粒子群优化(非凸,非线性,不连续的)

设定初末状态
设置测量反馈模块
解优化问题求控制量
输入控制量控制系统
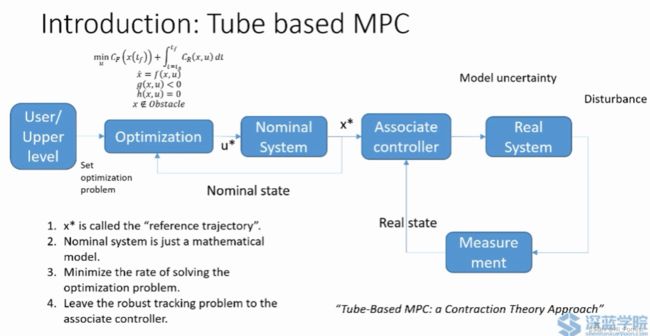
tube based MPC
控制量输入nominal system(优化的系统模型),产生了参考理想轨迹(没有外界扰动),真实系统通过一个associate controller 来处理反馈量和外界扰动,跟随理想轨迹。