深度学习基于 ResNet18 网络完成图像分类
一.前言
本次任务是利用ResNet18网络实践更通用的图像分类任务。
ResNet系列网络,图像分类领域的知名算法,经久不衰,历久弥新,直到今天依旧具有广泛的研究意义和应用场景。被业界各种改进,经常用于图像识别任务。
今天主要介绍一下ResNet-18网络结构的案例,其他深层次网络,可以依次类推。
ResNet-18,数字代表的是网络的深度,也就是说ResNet18 网络就是18层的吗?实则不然,其实这里的18指定的是带有权重的 18层,包括卷积层和全连接层,不包括池化层和BN层。
图像分类(Image Classification)是计算机视觉中的一个基础任务,将图像的语义将不同图像划分到不同类别。很多任务也可以转换为图像分类任务。比如人脸检测就是判断一个区域内是否有人脸,可以看作一个二分类的图像分类任务。
- 数据集:使用的计算机视觉领域的经典CIFAR-10数据集
- 网络层:网络为ResNet18模型
- 优化器:优化器为Adam优化器
- 损失函数:损失函数为交叉熵损失
- 评价指标:评价指标为准确率
ResNet 网络简介:

二.数据预处理
2.1 数据集介绍
CIFAR-10数据集包含了10种不同的类别、共60,000张图像,其中每个类别的图像都是6000张,图像大小均为32×3232×32像素。
2.2 数据读取
在本实验中,将原始训练集拆分成了train_set、dev_set两个部分,分别包括40 000条和10 000条样本。将data_batch_1到data_batch_4作为训练集,data_batch_5作为验证集,test_batch作为测试集。 最终的数据集构成为:
- 训练集:40 000条样本。
- 验证集:10 000条样本。
- 测试集:10 000条样本。
读取一个batch数据的代码如下所示:
import os
import pickle
import numpy as np
def load_cifar10_batch(folder_path, batch_id=1, mode='train'):
if mode == 'test':
file_path = os.path.join(folder_path, 'test_batch')
else:
file_path = os.path.join(folder_path, 'data_batch_'+str(batch_id))
#加载数据集文件
with open(file_path, 'rb') as batch_file:
batch = pickle.load(batch_file, encoding = 'latin1')
imgs = batch['data'].reshape((len(batch['data']),3,32,32)) / 255.
labels = batch['labels']
return np.array(imgs, dtype='float32'), np.array(labels)
imgs_batch, labels_batch = load_cifar10_batch(folder_path='datasets/cifar-10-batches-py',
batch_id=1, mode='train')
查看数据的维度:
#打印一下每个batch中X和y的维度
print ("batch of imgs shape: ",imgs_batch.shape, "batch of labels shape: ", labels_batch.shape)
batch of imgs shape: (10000, 3, 32, 32) batch of labels shape: (10000,)
可视化观察其中的一张样本图像和对应的标签,代码如下所示:
%matplotlib inline
import matplotlib.pyplot as plt
image, label = imgs_batch[1], labels_batch[1]
print("The label in the picture is {}".format(label))
plt.figure(figsize=(2, 2))
plt.imshow(image.transpose(1,2,0))
plt.savefig('cnn-car.pdf')

2.3 构造Dataset类
构造一个CIFAR10Dataset类,其将继承自paddle.io.DataSet类,可以逐个数据进行处理。代码实现如下:
import paddle
import paddle.io as io
from paddle.vision.transforms import Normalize
class CIFAR10Dataset(io.Dataset):
def __init__(self, folder_path='/home/aistudio/cifar-10-batches-py', mode='train'):
if mode == 'train':
#加载batch1-batch4作为训练集
self.imgs, self.labels = load_cifar10_batch(folder_path=folder_path, batch_id=1, mode='train')
for i in range(2, 5):
imgs_batch, labels_batch = load_cifar10_batch(folder_path=folder_path, batch_id=i, mode='train')
self.imgs, self.labels = np.concatenate([self.imgs, imgs_batch]), np.concatenate([self.labels, labels_batch])
elif mode == 'dev':
#加载batch5作为验证集
self.imgs, self.labels = load_cifar10_batch(folder_path=folder_path, batch_id=5, mode='dev')
elif mode == 'test':
#加载测试集
self.imgs, self.labels = load_cifar10_batch(folder_path=folder_path, mode='test')
self.transform = Normalize(mean=[0.4914, 0.4822, 0.4465], std=[0.2023, 0.1994, 0.2010], data_format='CHW')
def __getitem__(self, idx):
img, label = self.imgs[idx], self.labels[idx]
img = self.transform(img)
return img, label
def __len__(self):
return len(self.imgs)
paddle.seed(100)
train_dataset = CIFAR10Dataset(folder_path='datasets/cifar-10-batches-py', mode='train')
dev_dataset = CIFAR10Dataset(folder_path='datasets/cifar-10-batches-py', mode='dev')
test_dataset = CIFAR10Dataset(folder_path='datasets/cifar-10-batches-py', mode='test')
三、模型构建
使用飞桨高层API中的Resnet18进行图像分类实验。
from paddle.vision.models import resnet18
resnet18_model = resnet18()
飞桨高层 API是对飞桨API的进一步封装与升级,提供了更加简洁易用的API,进一步提升了飞桨的易学易用性。其中,飞桨高层API封装了以下模块:
- Model类,支持仅用几行代码完成模型的训练;
- 图像预处理模块,包含数十种数据处理函数,基本涵盖了常用的数据处理、数据增强方法;
- 计算机视觉领域和自然语言处理领域的常用模型,包括但不限于mobilenet、resnet、yolov3、cyclegan、bert、transformer、seq2seq等等,同时发布了对应模型的预训练模型,可以直接使用这些模型或者在此基础上完成二次开发。
四、模型训练
复用RunnerV3类,实例化RunnerV3类,并传入训练配置。 使用训练集和验证集进行模型训练,共训练30个epoch。 在实验中,保存准确率最高的模型作为最佳模型。代码实现如下:
import paddle.nn.functional as F
import paddle.optimizer as opt
from nndl import RunnerV3, Accuracy
#指定运行设备
use_gpu = True if paddle.get_device().startswith("gpu") else False
if use_gpu:
paddle.set_device('gpu:0')
#学习率大小
lr = 0.001
#批次大小
batch_size = 64
#加载数据
train_loader = io.DataLoader(train_dataset, batch_size=batch_size, shuffle=True)
dev_loader = io.DataLoader(dev_dataset, batch_size=batch_size)
test_loader = io.DataLoader(test_dataset, batch_size=batch_size)
#定义网络
model = resnet18_model
#定义优化器,这里使用Adam优化器以及l2正则化策略,相关内容在7.3.3.2和7.6.2中会进行详细介绍
optimizer = opt.Adam(learning_rate=lr, parameters=model.parameters(), weight_decay=0.005)
#定义损失函数
loss_fn = F.cross_entropy
#定义评价指标
metric = Accuracy(is_logist=True)
#实例化RunnerV3
runner = RunnerV3(model, optimizer, loss_fn, metric)
#启动训练
log_steps = 3000
eval_steps = 3000
runner.train(train_loader, dev_loader, num_epochs=30, log_steps=log_steps,
eval_steps=eval_steps, save_path="best_model.pdparams")
可视化观察训练集与验证集的准确率及损失变化情况。
from nndl import plot
plot(runner, fig_name='cnn-loss4.pdf')
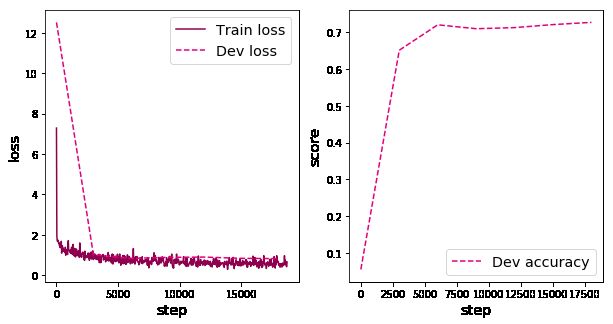
在本实验中,使用了第7章中介绍的Adam优化器进行网络优化,如果使用SGD优化器,会造成过拟合的现象,在验证集上无法得到很好的收敛效果。可以尝试使用第7章中其他优化策略调整训练配置,达到更高的模型精度。
五、模型评价
使用测试数据对在训练过程中保存的最佳模型进行评价,观察模型在测试集上的准确率以及损失情况。代码实现如下:
# 加载最优模型
runner.load_model('best_model.pdparams')
# 模型评价
score, loss = runner.evaluate(test_loader)
print("[Test] accuracy/loss: {:.4f}/{:.4f}".format(score, loss))
[Test] accuracy/loss: 0.7234/0.8324
六、模型预测
同样地,也可以使用保存好的模型,对测试集中的数据进行模型预测,观察模型效果,具体代码实现如下:
#获取测试集中的一个batch的数据
X, label = next(test_loader())
logits = runner.predict(X)
#多分类,使用softmax计算预测概率
pred = F.softmax(logits)
#获取概率最大的类别
pred_class = paddle.argmax(pred[2]).numpy()
label = label[2][0].numpy()
#输出真实类别与预测类别
print("The true category is {} and the predicted category is {}".format(label[0], pred_class[0]))
#可视化图片
plt.figure(figsize=(2, 2))
imgs, labels = load_cifar10_batch(folder_path='/home/aistudio/datasets/cifar-10-batches-py', mode='test')
plt.imshow(imgs[2].transpose(1,2,0))
plt.savefig('cnn-test-vis.pdf')
The true category is 8 and the predicted category is 8
真实是8,预测是8。ship