人体姿态估计——Python+OpenCV+OpenPose
目录
- 前言
- 技术难点
- 人体姿态估计方法类别
-
- 单人姿态估计
- 多人姿态估计
- 人体姿态跟踪
- 3D人体姿态估计
- 技术原理
-
- 神经网络的实现
- 相关代码
- 参考文献
- 运行过程
-
- 注意
前言
人体姿态估计(Human Pose estimation),几十年来备受计算机视觉界关注,其实在计算机视觉中是一个是很基础的问题,其实通俗化理解就是对“人体”的姿态(部分关键点:头,手,脚等具有象征性的关键部位)的位置估计。姿态估计可以应用在很多领域,比如说可以实现类似于格灵深瞳的各种游戏应用,当然,我们可以利用人体姿态估计,去完成某些生活需要!
技术难点
基于关键点的人体姿态识别可分为两个方面,即静态的人体姿态识别与动态的人体姿态识别,总的来说,人体关键点姿态识别技术主要面临的几方面技术难点如下:
(1) 姿态位移尺度变换
不同相机角度下捕获到的姿态关键点的空间位置、视角方向各不相同
(2) 姿态大小尺度变换
不同行为个体的差异造成相同人体姿态的尺寸大小、表观形状不完全相同。
(3) 关键点噪声与关键点缺失
人体姿态检测的造成的人体骨骼关键点丢失,或者关键点漂移等。
(4) 人体姿态表达的视频区域分割
对运动人体姿态语义视频的有效分割。比如,喝水动作,需要分割出人体从拿起水杯喝水,到喝完水放下水杯的过程。
人体姿态估计方法类别
虽然人体姿态估计是计算机视觉中一个很基础的问题,但是这个问题目前还是可以再具体化地分为4个不同的方面:单人姿态估计(Single-Person Skeleton Estimation)、多人姿态估计 (Multi-person Pose Estimation)、人体姿态跟踪(Video Pose Tracking)、3D人体姿态估计(3D Skeleton Estimation)。接下来就是对这四个方面的问题进行简略的说明。
 (人体姿态估计其实就是将各个关键点两两连接组成有效肢体)
(人体姿态估计其实就是将各个关键点两两连接组成有效肢体)
单人姿态估计
单人姿态估计是最早的一种人体姿态估计方法,意思当然就是只是针对图像或场景中只有一个人的情景,只估计单个人的姿态,目前来说,单人姿态估计已经不适用了,因为在现实生活中,一个人的情景少之又少,往往一个图像中会存在很多个人,如果应用单人姿态估计的话,就会存在很多的误差。对于解决单人姿态估计和下面的多人姿态估计问题时,一般有两种做法,分别是top-down和bottom-up的方法:top-down的方法,就可以简单理解为“从大到小”,先找到图片中行人,然后对每个行人做姿态估计,寻找每个人的关键点。单人姿态估计一般是使用top-down的方法来进行估计;bottom-up的方法,运行思路恰恰与top-down相反,它先是找图片中所有关键点(parts),比如所有头部,手,脚,膝盖等。然后把这些关键点相连组装成一个个行人。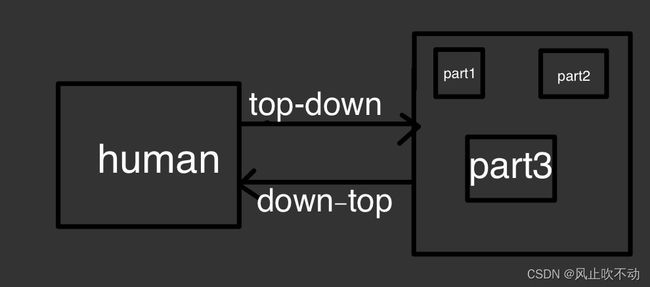
(top-down和down-top运行原理)
多人姿态估计
多人姿态估计其实就是在单人姿态估计算法的基础上,进一步优化,从而能够做到对一张图上的多个人体姿态进行估计,估计方法就不再多言了,在上面的单人姿态估计中已经简略地介绍了方法,主要就是运用down-top的方法来进行估计。
人体姿态跟踪
人体姿态跟踪主要是针对视频场景中的每一个行人(运动中的人物),进行人体以及每个关键点的跟踪。这个问题本身其实难度是很大的。相比行人跟踪来讲,人体关键点在视频中的temporal motion可能比较大,比如一个行走的行人,手跟脚会不停的摆动,所以跟踪难度会比跟踪人体框大。目前主要有的数据集是PoseTrack。
3D人体姿态估计
3D人体姿态估计,就是通过输入人体RGB图像,输出3D的人体关键点。从而使人体姿态估计更加完善,如下图:
技术原理
需要运用到OpenPose,OpenPose人体姿态识别项目是美国卡耐基梅隆大学(CMU)基于卷积神经网络和监督学习并以Caffe为框架开发的开源库。可以实现人体动作、面部表情、手指运动等姿态估计。适用于单人和多人,具有极好的鲁棒性。是世界上首个基于深度学习的实时多人二维姿态估计应用,基于它的实例如雨后春笋般涌现。
输入一幅图像,经过卷积网络提取特征,得到一组特征图,然后分成两个岔路,分别使用 CNN网络提取Part Confidence Maps 和 Part Affinity Fields;

得到这两个信息后,我们使用图论中的 Bipartite Matching(偶匹配) 求出Part Association,将同一个人的关节点连接起来,由于PAF自身的矢量性,使得生成的偶匹配很正确,最终合并为一个人的整体骨架;
最后基于PAFs求Multi-Person Parsing—>把Multi-person parsing问题转换成graphs问题—>Hungarian Algorithm(匈牙利算法)
(匈牙利算法是部图匹配最常见的算法,该算法的核心就是寻找增广路径,它是一种用增广路径求二分图最大匹配的算法。)
神经网络的实现

阶段一:VGGNet的前10层用于为输入图像创建特征映射。

阶段二:使用2分支多阶段CNN,其中第一分支预测身体部位位置(例如肘部,膝部等)的一组2D置信度图(S)。 如下图所示,给出关键点的置信度图和亲和力图 - 左肩。

第二分支预测一组部分亲和度的2D矢量场(L),其编码部分之间的关联度。 如下图所示,显示颈部和左肩之间的部分亲和力。
阶段三: 通过贪心推理解析置信度和亲和力图,对图像中的所有人生成2D关键点。
相关代码
import argparse
import cv2
import numpy as np
import torch
from models.with_mobilenet import PoseEstimationWithMobileNet
from modules.keypoints import extract_keypoints, group_keypoints
from modules.load_state import load_state
from modules.pose import Pose, track_poses
from val import normalize, pad_width
class ImageReader(object):
def __init__(self, file_names):
self.file_names = file_names
self.max_idx = len(file_names)
def __iter__(self):
self.idx = 0
return self
def __next__(self):
if self.idx == self.max_idx:
raise StopIteration
img = cv2.imread(self.file_names[self.idx], cv2.IMREAD_COLOR)
if img.size == 0:
raise IOError('Image {} cannot be read'.format(self.file_names[self.idx]))
self.idx = self.idx + 1
return img
class VideoReader(object):
def __init__(self, file_name):
self.file_name = file_name
try: # OpenCV needs int to read from webcam
self.file_name = int(file_name)
except ValueError:
pass
def __iter__(self):
self.cap = cv2.VideoCapture(self.file_name)
if not self.cap.isOpened():
raise IOError('Video {} cannot be opened'.format(self.file_name))
return self
def __next__(self):
was_read, img = self.cap.read()
if not was_read:
raise StopIteration
return img
def infer_fast(net, img, net_input_height_size, stride, upsample_ratio, cpu,
pad_value=(0, 0, 0), img_mean=np.array([128, 128, 128], np.float32), img_scale=np.float32(1/256)):
height, width, _ = img.shape
scale = net_input_height_size / height
scaled_img = cv2.resize(img, (0, 0), fx=scale, fy=scale, interpolation=cv2.INTER_LINEAR)
scaled_img = normalize(scaled_img, img_mean, img_scale)
min_dims = [net_input_height_size, max(scaled_img.shape[1], net_input_height_size)]
padded_img, pad = pad_width(scaled_img, stride, pad_value, min_dims)
tensor_img = torch.from_numpy(padded_img).permute(2, 0, 1).unsqueeze(0).float()
if not cpu:
tensor_img = tensor_img.cuda()
stages_output = net(tensor_img)
stage2_heatmaps = stages_output[-2]
heatmaps = np.transpose(stage2_heatmaps.squeeze().cpu().data.numpy(), (1, 2, 0))
heatmaps = cv2.resize(heatmaps, (0, 0), fx=upsample_ratio, fy=upsample_ratio, interpolation=cv2.INTER_CUBIC)
stage2_pafs = stages_output[-1]
pafs = np.transpose(stage2_pafs.squeeze().cpu().data.numpy(), (1, 2, 0))
pafs = cv2.resize(pafs, (0, 0), fx=upsample_ratio, fy=upsample_ratio, interpolation=cv2.INTER_CUBIC)
return heatmaps, pafs, scale, pad
def run_demo(net, image_provider, height_size, cpu, track, smooth):
net = net.eval()
if not cpu:
net = net.cuda()
stride = 8
upsample_ratio = 4
num_keypoints = Pose.num_kpts
previous_poses = []
delay = 1
for img in image_provider:
orig_img = img.copy()
heatmaps, pafs, scale, pad = infer_fast(net, img, height_size, stride, upsample_ratio, cpu)
total_keypoints_num = 0
all_keypoints_by_type = []
for kpt_idx in range(num_keypoints): # 19th for bg
total_keypoints_num += extract_keypoints(heatmaps[:, :, kpt_idx], all_keypoints_by_type, total_keypoints_num)
pose_entries, all_keypoints = group_keypoints(all_keypoints_by_type, pafs)
for kpt_id in range(all_keypoints.shape[0]):
all_keypoints[kpt_id, 0] = (all_keypoints[kpt_id, 0] * stride / upsample_ratio - pad[1]) / scale
all_keypoints[kpt_id, 1] = (all_keypoints[kpt_id, 1] * stride / upsample_ratio - pad[0]) / scale
current_poses = []
for n in range(len(pose_entries)):
if len(pose_entries[n]) == 0:
continue
pose_keypoints = np.ones((num_keypoints, 2), dtype=np.int32) * -1
for kpt_id in range(num_keypoints):
if pose_entries[n][kpt_id] != -1.0: # keypoint was found
pose_keypoints[kpt_id, 0] = int(all_keypoints[int(pose_entries[n][kpt_id]), 0])
pose_keypoints[kpt_id, 1] = int(all_keypoints[int(pose_entries[n][kpt_id]), 1])
pose = Pose(pose_keypoints, pose_entries[n][18])
current_poses.append(pose)
if track:
track_poses(previous_poses, current_poses, smooth=smooth)
previous_poses = current_poses
for pose in current_poses:
pose.draw(img)
img = cv2.addWeighted(orig_img, 0.6, img, 0.4, 0)
for pose in current_poses:
cv2.rectangle(img, (pose.bbox[0], pose.bbox[1]),
(pose.bbox[0] + pose.bbox[2], pose.bbox[1] + pose.bbox[3]), (0, 255, 0))
if track:
cv2.putText(img, 'id: {}'.format(pose.id), (pose.bbox[0], pose.bbox[1] - 16),
cv2.FONT_HERSHEY_COMPLEX, 0.5, (0, 0, 255))
cv2.imshow('Lightweight Human Pose Estimation Python Demo', img)
key = cv2.waitKey(delay)
if key == 27: # esc
return
elif key == 112: # 'p'
if delay == 1:
delay = 0
else:
delay = 1
if __name__ == '__main__':
parser = argparse.ArgumentParser(
description='''Lightweight human pose estimation python demo.
This is just for quick results preview.
Please, consider c++ demo for the best performance.''')
parser.add_argument('--checkpoint-path', type=str, required=True, help='path to the checkpoint')
parser.add_argument('--height-size', type=int, default=256, help='network input layer height size')
parser.add_argument('--video', type=str, default='', help='path to video file or camera id')
parser.add_argument('--images', nargs='+', default='', help='path to input image(s)')
parser.add_argument('--cpu', action='store_true', help='run network inference on cpu')
parser.add_argument('--track', type=int, default=1, help='track pose id in video')
parser.add_argument('--smooth', type=int, default=1, help='smooth pose keypoints')
args = parser.parse_args()
if args.video == '' and args.images == '':
raise ValueError('Either --video or --image has to be provided')
net = PoseEstimationWithMobileNet()
checkpoint = torch.load(args.checkpoint_path, map_location='cpu')
load_state(net, checkpoint)
frame_provider = ImageReader(args.images)
if args.video != '':
frame_provider = VideoReader(args.video)
else:
args.track = 0
run_demo(net, frame_provider, args.height_size, args.cpu, args.track, args.smooth)
参考文献
[1].Python+OpenCV+OpenPose实现人体姿态估计(人体关键点检测)_不脱发的程序猿-CSDN博客
运行过程

(gif较卡只能用jpg)
本项目实现代码及模型参见网址:https://github.com/Daniil-Osokin/lightweight-human-pose-estimation.pytorch
人体姿态估计代码运行
注意
首先需要阅读README.MD文件。里面有一个文件checkpoint_iter_370000.pth 要下载下来。这是训练好的模型文件。
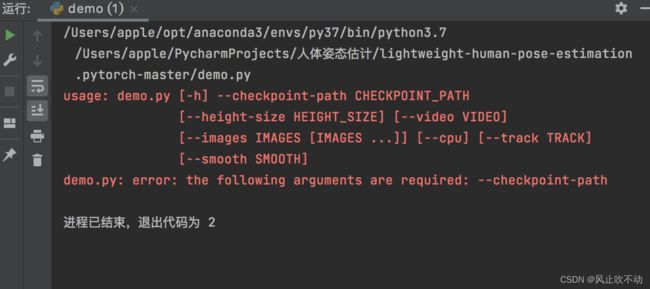
运行demo.py时
例如,可能会提示No module named pycocotools,
在环境中pip install pycocotools 即可解决
依赖库安装成功后,会提示
The following arguments are required: --checkpoint-path
然后在菜单Run,edit configurations在parameters 一栏填–checkpoint-path=checkpoint_iter_370000.pth
如果提示要缺少 –video 或 –image
则在命令行参数里添加 --video=0,表示使用你的0号摄像头。
可能还会提示关于cuda的错误,增加一个命令行参数:–cpu,即可。(每个命令行参数都需要一个空格隔开)

(即形参)
类似代码:
https://github.com/edvardHua/PoseEstimationForMobile
https://github.com/tensorlayer/hyperpose
https://github.com/facebookresearch/VideoPose3D