基于FPGA的双目相机目标深度图像提取实现——简略版
目录
一、理论基础
二、核心程序
三、测试结果
一、理论基础
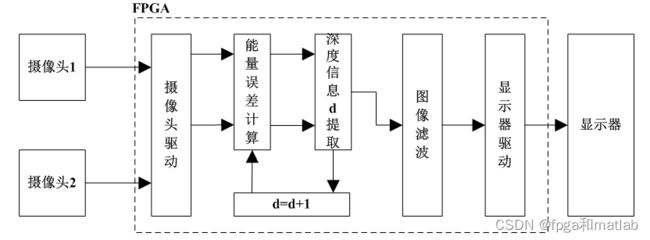
系统的整体框架结构如下图所示:
双目立体视觉模拟了人类双眼感知环境的方式其结构如图2-1所示,主要包括图像采集、摄像机表达、图像校正、立体匹配、及深度获取等五部分构成。
为了使得双目立体视觉能够走出实验室进入到实际应用中,研究者们在优化双目立体视觉系统实时性方面做了许多努力。在这些工作中有一些是基于资源受限的平台如FPGA、DSP或者ASIC等,它们都具有良好的并行计算的能力,并且使用T兼容性很好的局部匹配算法,但是它们的设计都十分复杂,并且具有较长的开发周期。而一些最近的研究确信FPGA是目前较为适合硬件开发的平台P41。在早期的研究中,大部分基于FPGA的平台为了满足实时性W及嵌入式应用的需求,大都使用原理较为简单的基于SAD的算法。而对于PC平台来说,即使是最简单的SAD算法也是不可能满足实时性的需求。然而,对于硬件平台来说,算的速度W及资源的占用是设计的核也内容,而准确性却被忽视了。在这之后,随着立体视觉技术W及FPGA制造工艺技术的发展,越来越多的基于FPGA的平台涌现出来。这些平台使用了更新更有效的算法,但是大部分都没有进行准确性方面的实验和测试。
二、核心程序
`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Create Date: 18:11:17 06/08/2018
// Design Name:
// Module Name: deep_image1
// Project Name:
// Target Devices:
// Tool versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//
module deep_image19(
FCLK_CLK0,
gpio_rtl_tri_o_0,
Edis0,
disparity0,
FIFO_M_AXIS_0_tdata,
FIFO_M_AXIS_1_tdata,
Edis1,
disparity1
);
input FCLK_CLK0;
input gpio_rtl_tri_o_0;
input[15:0]Edis0;
input[15:0]disparity0;
input[23:0]FIFO_M_AXIS_0_tdata;
input[23:0]FIFO_M_AXIS_1_tdata;
output[15:0]Edis1;
output [15:0]disparity1;
reg [7:0]R1;
reg [7:0]G1;
reg [7:0]B1;
reg [7:0]Rdelay1;
reg [7:0]Gdelay1;
reg [7:0]Bdelay1;
reg [7:0]Rdelay1a;
reg [7:0]Gdelay1a;
reg [7:0]Bdelay1a;
reg [7:0]Rdelay1b;
reg [7:0]Gdelay1b;
reg [7:0]Bdelay1b;
reg [7:0]Rdelay1c;
reg [7:0]Gdelay1c;
reg [7:0]Bdelay1c;
reg [7:0]Rdelay1d;
reg [7:0]Gdelay1d;
reg [7:0]Bdelay1d;
reg [7:0]Rdelay1e;
reg [7:0]Gdelay1e;
reg [7:0]Bdelay1e;
reg [7:0]Rdelay1f;
reg [7:0]Gdelay1f;
reg [7:0]Bdelay1f;
reg [7:0]Rdelay1g;
reg [7:0]Gdelay1g;
reg [7:0]Bdelay1g;
reg [7:0]Rdelay1h;
reg [7:0]Gdelay1h;
reg [7:0]Bdelay1h;
reg [7:0]Rdelay1i;
reg [7:0]Gdelay1i;
reg [7:0]Bdelay1i;
reg [7:0]Rdelay1j;
reg [7:0]Gdelay1j;
reg [7:0]Bdelay1j;
reg [7:0]Rdelay1k;
reg [7:0]Gdelay1k;
reg [7:0]Bdelay1k;
reg [7:0]Rdelay1l;
reg [7:0]Gdelay1l;
reg [7:0]Bdelay1l;
reg [7:0]Rdelay1m;
reg [7:0]Gdelay1m;
reg [7:0]Bdelay1m;
reg [7:0]Rdelay1n;
reg [7:0]Gdelay1n;
reg [7:0]Bdelay1n;
reg [7:0]Rdelay1o;
reg [7:0]Gdelay1o;
reg [7:0]Bdelay1o;
reg [7:0]Rdelay1p;
reg [7:0]Gdelay1p;
reg [7:0]Bdelay1p;
reg [7:0]Rdelay1q;
reg [7:0]Gdelay1q;
reg [7:0]Bdelay1q;
reg [7:0]Rdelay1r;
reg [7:0]Gdelay1r;
reg [7:0]Bdelay1r;
reg [7:0]Rdelay11;
reg [7:0]Gdelay11;
reg [7:0]Bdelay11;
always @(posedge FCLK_CLK0 or negedge gpio_rtl_tri_o_0)
begin
if(!gpio_rtl_tri_o_0)
begin
R1 <= 8'd0;
G1 <= 8'd0;
B1 <= 8'd0;
Rdelay1<= 8'd0;
Gdelay1<= 8'd0;
Bdelay1<= 8'd0;
Rdelay1a<= 8'd0;
Gdelay1a<= 8'd0;
Bdelay1a<= 8'd0;
Rdelay1b<= 8'd0;
Gdelay1b<= 8'd0;
Bdelay1b<= 8'd0;
Rdelay1c<= 8'd0;
Gdelay1c<= 8'd0;
Bdelay1c<= 8'd0;
Rdelay1d<= 8'd0;
Gdelay1d<= 8'd0;
Bdelay1d<= 8'd0;
Rdelay1e<= 8'd0;
Gdelay1e<= 8'd0;
Bdelay1e<= 8'd0;
Rdelay1f<= 8'd0;
Gdelay1f<= 8'd0;
Bdelay1f<= 8'd0;
Rdelay1g<= 8'd0;
Gdelay1g<= 8'd0;
Bdelay1g<= 8'd0;
Rdelay1h<= 8'd0;
Gdelay1h<= 8'd0;
Bdelay1h<= 8'd0;
Rdelay1i<= 8'd0;
Gdelay1i<= 8'd0;
Bdelay1i<= 8'd0;
Rdelay1j<= 8'd0;
Gdelay1j<= 8'd0;
Bdelay1j<= 8'd0;
Rdelay1k<= 8'd0;
Gdelay1k<= 8'd0;
Bdelay1k<= 8'd0;
Rdelay1l<= 8'd0;
Gdelay1l<= 8'd0;
Bdelay1l<= 8'd0;
Rdelay1m<= 8'd0;
Gdelay1m<= 8'd0;
Bdelay1m<= 8'd0;
Rdelay1n<= 8'd0;
Gdelay1n<= 8'd0;
Bdelay1n<= 8'd0;
Rdelay1o<= 8'd0;
Gdelay1o<= 8'd0;
Bdelay1o<= 8'd0;
Rdelay1p<= 8'd0;
Gdelay1p<= 8'd0;
Bdelay1p<= 8'd0;
Rdelay1q<= 8'd0;
Gdelay1q<= 8'd0;
Bdelay1q<= 8'd0;
Rdelay1r<= 8'd0;
Gdelay1r<= 8'd0;
Bdelay1r<= 8'd0;
Rdelay11<= 8'd0;
Gdelay11<= 8'd0;
Bdelay11<= 8'd0;
end
else begin
R1 <= FIFO_M_AXIS_0_tdata[23:16];
G1 <= FIFO_M_AXIS_0_tdata[15:8];
B1 <= FIFO_M_AXIS_0_tdata[7:0];
Rdelay1 <= FIFO_M_AXIS_1_tdata[23:16];
Gdelay1 <= FIFO_M_AXIS_1_tdata[15:8];
Bdelay1 <= FIFO_M_AXIS_1_tdata[7:0];
Rdelay1a<= Rdelay1;
Gdelay1a<= Gdelay1;
Bdelay1a<= Bdelay1;
Rdelay1b<= Rdelay1a;
Gdelay1b<= Gdelay1a;
Bdelay1b<= Bdelay1a;
Rdelay1c<= Rdelay1b;
Gdelay1c<= Gdelay1b;
Bdelay1c<= Bdelay1b;
Rdelay1d<= Rdelay1c;
Gdelay1d<= Gdelay1c;
Bdelay1d<= Bdelay1c;
Rdelay1e<= Rdelay1d;
Gdelay1e<= Gdelay1d;
Bdelay1e<= Bdelay1d;
Rdelay1f<= Rdelay1e;
Gdelay1f<= Gdelay1e;
Bdelay1f<= Bdelay1e;
Rdelay1g<= Rdelay1f;
Gdelay1g<= Gdelay1f;
Bdelay1g<= Bdelay1f;
Rdelay1h<= Rdelay1g;
Gdelay1h<= Gdelay1g;
Bdelay1h<= Bdelay1g;
Rdelay1i<= Rdelay1h;
Gdelay1i<= Gdelay1h;
Bdelay1i<= Bdelay1h;
Rdelay1j<= Rdelay1i;
Gdelay1j<= Gdelay1i;
Bdelay1j<= Bdelay1i;
Rdelay1k<= Rdelay1j;
Gdelay1k<= Gdelay1j;
Bdelay1k<= Bdelay1j;
Rdelay1l<= Rdelay1k;
Gdelay1l<= Gdelay1k;
Bdelay1l<= Bdelay1k;
Rdelay1m<= Rdelay1l;
Gdelay1m<= Gdelay1l;
Bdelay1m<= Bdelay1l;
Rdelay1n<= Rdelay1m;
Gdelay1n<= Gdelay1m;
Bdelay1n<= Bdelay1m;
Rdelay1o<= Rdelay1n;
Gdelay1o<= Gdelay1n;
Bdelay1o<= Bdelay1n;
Rdelay1p<= Rdelay1o;
Gdelay1p<= Gdelay1o;
Bdelay1p<= Bdelay1o;
Rdelay1q<= Rdelay1p;
Gdelay1q<= Gdelay1p;
Bdelay1q<= Bdelay1p;
Rdelay1r<= Rdelay1q;
Gdelay1r<= Gdelay1q;
Bdelay1r<= Bdelay1q;
Rdelay11<= Rdelay1r;
Gdelay11<= Gdelay1r;
Bdelay11<= Bdelay1r;
end
end
reg [7:0]Rd1;
reg [7:0]Gd1;
reg [7:0]Bd1;
reg [15:0]Rdata1;
reg [15:0]Gdata1;
reg [15:0]Bdata1;
reg [15:0]Sdata1;
reg [15:0]ErrorEnergy1;
always @(posedge FCLK_CLK0 or negedge gpio_rtl_tri_o_0)
begin
if(!gpio_rtl_tri_o_0)
begin
Rd1 <= 8'd0;
Gd1 <= 8'd0;
Bd1 <= 8'd0;
Rdata1 <= 16'd0;
Gdata1 <= 16'd0;
Bdata1 <= 16'd0;
Sdata1 <= 16'd0;
ErrorEnergy1 <= 16'd0;
end
else begin
if(R1>Rdelay11)
Rd1 <= R1-Rdelay11;
else
Rd1 <= Rdelay11-R1;
if(G1>Gdelay11)
Gd1 <= G1-Gdelay11;
else
Gd1 <= Gdelay11-G1;
if(B1>Bdelay11)
Bd1 <= B1-Bdelay11;
else
Bd1 <= Bdelay11-B1;
Rdata1 <= Rd1*Rd1;
Gdata1 <= Gd1*Gd1;
Bdata1 <= Bd1*Bd1;
Sdata1 <= Rdata1+Gdata1+Bdata1;
ErrorEnergy1 <= Sdata1;
end
end
reg [15:0]Edis1;
reg [15:0]disparity1;
always @(posedge FCLK_CLK0 or negedge gpio_rtl_tri_o_0)
begin
if(!gpio_rtl_tri_o_0)
begin
Edis1 <= 16'd0;
disparity1 <= 16'd0;
end
else begin
if(Edis0 >= ErrorEnergy1)
begin
disparity1 <= 16'd19;
Edis1 <= ErrorEnergy1;
end
else begin
disparity1 <= disparity0;
Edis1 <= Edis0;
end
end
end
endmodule三、测试结果
点击run之后,程序就下载到FPGA开发板中了。

A23-44