使用OpenCV如何确定一个对象的方向
在本教程中,我们将构建一个程序,该程序可以使用流行的计算机视觉库 OpenCV 确定对象的方向(即以度为单位的旋转角度)。
最常见的现实世界用例之一是当您想要开发机械臂的取放系统时。确定一个物体在传送带上的方向是确定合适的抓取、捡起物体并将其放置在另一个位置的关键。

1.代码实现
接受一个名为input_img.jpg的图像,并输出一个名为output_img.jpg的带标记的图像。部分代码来自官方的OpenCV实现。
import cv2 as cv
from math import atan2, cos, sin, sqrt, pi
import numpy as np
def drawAxis(img, p_, q_, color, scale):
p = list(p_)
q = list(q_)
## [visualization1]
angle = atan2(p[1] - q[1], p[0] - q[0]) # angle in radians
hypotenuse = sqrt((p[1] - q[1]) * (p[1] - q[1]) + (p[0] - q[0]) * (p[0] - q[0]))
# Here we lengthen the arrow by a factor of scale
q[0] = p[0] - scale * hypotenuse * cos(angle)
q[1] = p[1] - scale * hypotenuse * sin(angle)
cv.line(img, (int(p[0]), int(p[1])), (int(q[0]), int(q[1])), color, 3, cv.LINE_AA)
# create the arrow hooks
p[0] = q[0] + 9 * cos(angle + pi / 4)
p[1] = q[1] + 9 * sin(angle + pi / 4)
cv.line(img, (int(p[0]), int(p[1])), (int(q[0]), int(q[1])), color, 3, cv.LINE_AA)
p[0] = q[0] + 9 * cos(angle - pi / 4)
p[1] = q[1] + 9 * sin(angle - pi / 4)
cv.line(img, (int(p[0]), int(p[1])), (int(q[0]), int(q[1])), color, 3, cv.LINE_AA)
## [visualization1]
def getOrientation(pts, img):
## [pca]
# Construct a buffer used by the pca analysis
sz = len(pts)
data_pts = np.empty((sz, 2), dtype=np.float64)
for i in range(data_pts.shape[0]):
data_pts[i,0] = pts[i,0,0]
data_pts[i,1] = pts[i,0,1]
# Perform PCA analysis
mean = np.empty((0))
mean, eigenvectors, eigenvalues = cv.PCACompute2(data_pts, mean)
# Store the center of the object
cntr = (int(mean[0,0]), int(mean[0,1]))
## [pca]
## [visualization]
# Draw the principal components
cv.circle(img, cntr, 3, (255, 0, 255), 2)
p1 = (cntr[0] + 0.02 * eigenvectors[0,0] * eigenvalues[0,0], cntr[1] + 0.02 * eigenvectors[0,1] * eigenvalues[0,0])
p2 = (cntr[0] - 0.02 * eigenvectors[1,0] * eigenvalues[1,0], cntr[1] - 0.02 * eigenvectors[1,1] * eigenvalues[1,0])
drawAxis(img, cntr, p1, (255, 255, 0), 1)
drawAxis(img, cntr, p2, (0, 0, 255), 5)
angle = atan2(eigenvectors[0,1], eigenvectors[0,0]) # orientation in radians
## [visualization]
# Label with the rotation angle
label = " Rotation Angle: " + str(-int(np.rad2deg(angle)) - 90) + " degrees"
textbox = cv.rectangle(img, (cntr[0], cntr[1]-25), (cntr[0] + 250, cntr[1] + 10), (255,255,255), -1)
cv.putText(img, label, (cntr[0], cntr[1]), cv.FONT_HERSHEY_SIMPLEX, 0.5, (0,0,0), 1, cv.LINE_AA)
return angle
# Load the image
img = cv.imread("input_img.jpg")
# Was the image there?
if img is None:
print("Error: File not found")
exit(0)
cv.imshow('Input Image', img)
# Convert image to grayscale
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# Convert image to binary
_, bw = cv.threshold(gray, 50, 255, cv.THRESH_BINARY | cv.THRESH_OTSU)
# Find all the contours in the thresholded image
contours, _ = cv.findContours(bw, cv.RETR_LIST, cv.CHAIN_APPROX_NONE)
for i, c in enumerate(contours):
# Calculate the area of each contour
area = cv.contourArea(c)
# Ignore contours that are too small or too large
if area < 3700 or 100000 < area:
continue
# Draw each contour only for visualisation purposes
cv.drawContours(img, contours, i, (0, 0, 255), 2)
# Find the orientation of each shape
getOrientation(c, img)
cv.imshow('Output Image', img)
cv.waitKey(0)
cv.destroyAllWindows()
# Save the output image to the current directory
cv.imwrite("output_img.jpg", img)
2.输出图像

3.了解坐标轴
红线表示每个物体的正x轴。蓝线表示每个物体的正y轴。
全局正x轴从左到右横贯图像。整体正z轴指向这一页外。全局正y轴从图像的底部垂直指向图像的顶部。
使用右手法则来测量旋转,你将你的四个手指(食指到小指)笔直地指向全局正x轴的方向。
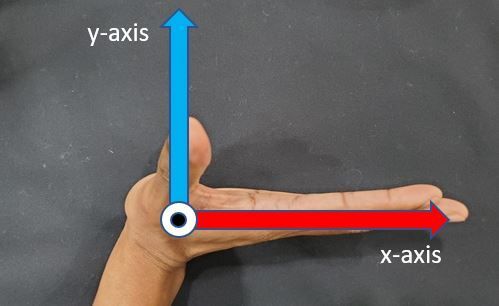
然后逆时针旋转四个手指90度。指尖指向y轴正方向,大拇指指向纸外z轴正方向。

4.计算0到180度之间的方向
如果我们想计算一个对象的方向,并确保结果总是在0到180度之间,我们可以使用以下代码:
# This programs calculates the orientation of an object.
# The input is an image, and the output is an annotated image
# with the angle of otientation for each object (0 to 180 degrees)
import cv2 as cv
from math import atan2, cos, sin, sqrt, pi
import numpy as np
# Load the image
img = cv.imread("input_img.jpg")
# Was the image there?
if img is None:
print("Error: File not found")
exit(0)
cv.imshow('Input Image', img)
# Convert image to grayscale
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# Convert image to binary
_, bw = cv.threshold(gray, 50, 255, cv.THRESH_BINARY | cv.THRESH_OTSU)
# Find all the contours in the thresholded image
contours, _ = cv.findContours(bw, cv.RETR_LIST, cv.CHAIN_APPROX_NONE)
for i, c in enumerate(contours):
# Calculate the area of each contour
area = cv.contourArea(c)
# Ignore contours that are too small or too large
if area < 3700 or 100000 < area:
continue
# cv.minAreaRect returns:
# (center(x, y), (width, height), angle of rotation) = cv2.minAreaRect(c)
rect = cv.minAreaRect(c)
box = cv.boxPoints(rect)
box = np.int0(box)
# Retrieve the key parameters of the rotated bounding box
center = (int(rect[0][0]),int(rect[0][1]))
width = int(rect[1][0])
height = int(rect[1][1])
angle = int(rect[2])
if width < height:
angle = 90 - angle
else:
angle = -angle
label = " Rotation Angle: " + str(angle) + " degrees"
textbox = cv.rectangle(img, (center[0]-35, center[1]-25),
(center[0] + 295, center[1] + 10), (255,255,255), -1)
cv.putText(img, label, (center[0]-50, center[1]),
cv.FONT_HERSHEY_SIMPLEX, 0.7, (0,0,0), 1, cv.LINE_AA)
cv.drawContours(img,[box],0,(0,0,255),2)
cv.imshow('Output Image', img)
cv.waitKey(0)
cv.destroyAllWindows()
# Save the output image to the current directory
cv.imwrite("min_area_rec_output.jpg", img)

参考目录
https://automaticaddison.com/how-to-determine-the-orientation-of-an-object-using-opencv/