机器学习(十五)-DBSCAN算法及Python实例
原创不易,转载前请注明博主的链接地址:Blessy_Zhu https://blog.csdn.net/weixin_42555080
本次代码的环境:
运行平台: Windows
Python版本: Python3.x
IDE: PyCharm
一 从K-Means到DBSCAN
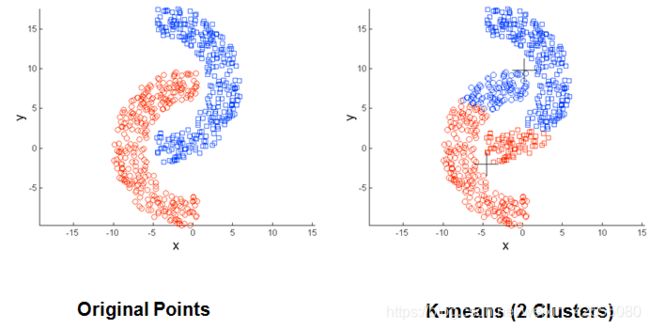
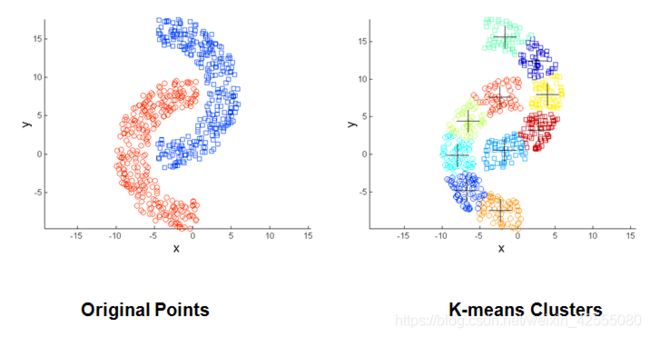
在认识DBSCAN之前,首先看一下它是要解决什么样的问题的!在文章机器学习(九)-k-means算法及优化和Python已经介绍了K-Means的基本用法,但是K-Means的局限性却是:
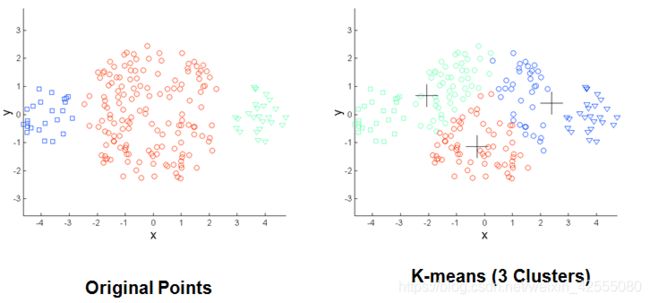
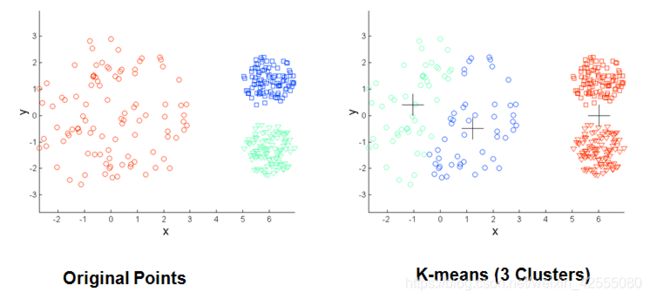
(1)当聚类的大小、密度、形状不同时,K-means 聚类的结果不理想
(2)数据集包含离群点时,K-means 聚类结果不理想
(3)两个类距离较近时,聚类结果不合理
通过下面几幅图可以清晰的看到K-Means的局限性。
针对上面的问题,提出了DBSACN模型。DBSCAN(Density-Based Spatial Clustering of Applications with Noise)是一个比较有代表性的基于密度的聚类算法。与划分和层次聚类方法不同,它将簇定义为密度相连的点的最大集合,能够把具有足够高密度的区域划分为簇,并可在噪声的空间数据库中发现任意形状的聚类。什么是基于密度的聚类算法?直白翻译就是带有噪声应用的基于密度的空间聚类。
二 DBSCAN算法简介
2.1 DBSCAN中的几个定义
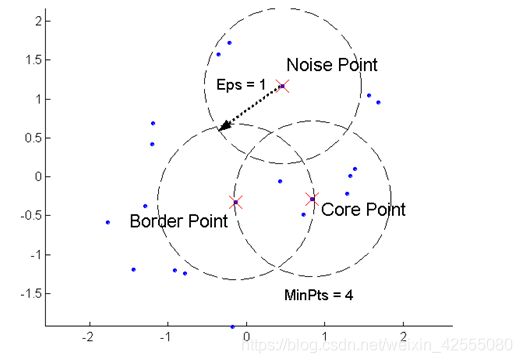
(I )密度 = 邻域(以Eps为半径)中点的个数
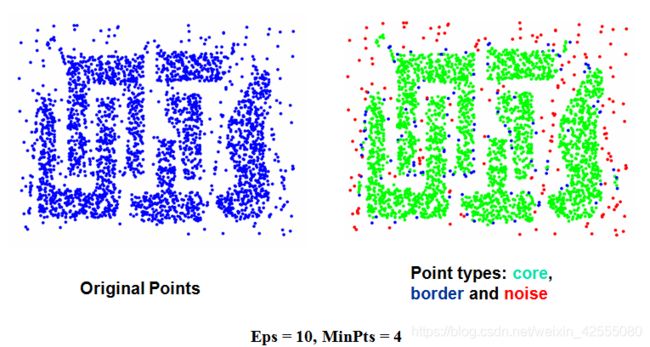
(II)核心点( core point ):如果该点的给定邻域内的点的个数超过给定的阈值MinPts(用户指定的参数)
(III)核心点是一个聚类的内部点
(IV)边界点( border point ):非核心点(它的EPS邻域中的点的个数少于MinPts),但它在落在某个核心点的邻域内
(V )噪声点( noise point ):一个点既不是核心点也不是边界点
2.2 DBSCAN的执行步骤
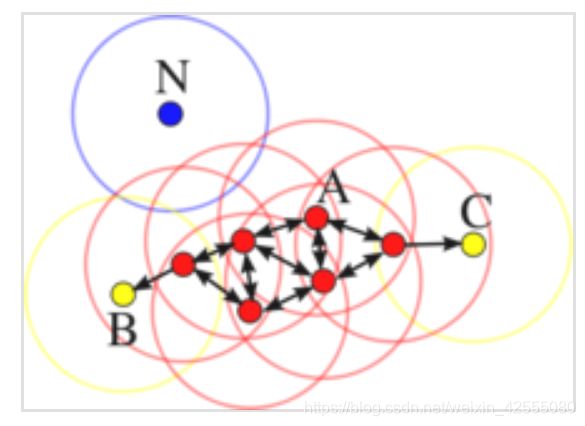
基本思想是:只要一个邻域中的点的密度大于域值MinPts ,就把它加到与之相近的聚类中去。(聚类使用密度可达的概念)
DBScan需要二个参数: 扫描半径 (eps)和最小包含点数(minPts)。
任选一个未被访问(unvisited)的点开始,找出与其距离在eps之内(包括eps)的所有附近点。
如果附近点的数量 ≥ minPts,则当前点与其附近点形成一个簇,并且出发点被标记为已访问(visited)。 然后递归,以相同的方法处理该簇内所有未被标记为已访问(visited)的点,从而对簇进行扩展。
如果 附近点的数量 < minPts,则该点暂时被标记作为噪声点。
如果簇充分地被扩展,即簇内的所有点被标记为已访问,然后用同样的算法去处理未被访问的点。
2.3 DBSCAN算法描述
输入: 包含n个对象的数据库,半径e,最少数目MinPts;
输出:所有生成的簇,达到密度要求。
(1)Repeat
(2)从数据库中抽出一个未处理的点;
(3)IF抽出的点是核心点 THEN 找出所有从该点密度可达的对象,形成一个簇;
(4)ELSE 抽出的点是边缘点(非核心对象),跳出本次循环,寻找下一个点;
(5)UNTIL 所有的点都被处理。
DBSCAN对用户定义的参数很敏感,细微的不同都可能导致差别很大的结果,而参数的选择无规律可循,只能靠经验确定。
2.4 DBSCAN的时间空间复杂度
- DBSCAN的时间复杂度
DBSCAN的基本时间复杂度
O(mX找出Eps邻域中的点所需要的时间)
其中m是点的个数
在最坏情况下,时间复杂度是O(m2) - 在低维空间, 使用kd树可以有效地检索特定点给定距离内的所有点,时间复杂度可以降低到O(m log m)
- DBSCAN的空间复杂度为O(m)
对每个点, 只需要维持少量数据, 即簇标号和每个点是核心点、边界点还是噪声点的标识
2.5 DBSCAN: 确定 Eps和MinPts
- 点的第k个最近邻的距离称为k-距离,即Eps
- 确定MinPts的基本思想
簇中的诸点的k-距离一般很小
噪声点的k-距离一般很大.
计算每个点的k-距离, 并由小到大排序, 绘制k-距离曲线
预料该曲线某处, k-距离的急剧变化
该处的k-距离对应于Eps
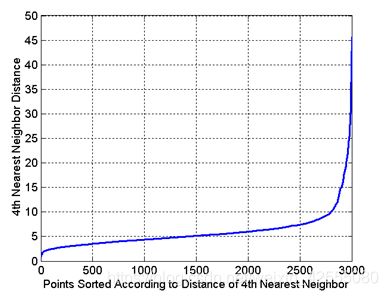
这种方法决定的Eps值依赖于k,但并不随k改变而剧烈变化
2.6 基于密度的聚类的优缺点
- 优点:能识别任意形状、不同大小的聚类,对噪声数据不敏感
- 缺点:
- 算法复杂度大,需扫描整个数据集,查询每个数据对象,当数据量大时会造成频繁的I/O操作(可建立空间索引来降低计算量)
- 对数据维数的伸缩性较差
- 参数难以选择,聚类结果对参数敏感
- 不能发现多密度聚类
- 聚类的边界可能丢失
- 不适合高维数据
- 密度定义困难
- 不适合多密度数据和变化密度的数据
如下图,A、B周围噪声的密度与C、D密度相同(用明暗表示)
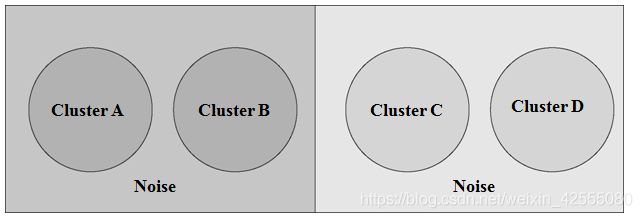
EPS小,可以发现C、D,但A、B和噪声为一个簇;EPS大,可以发现A、B,及周围噪声,但C、D及周围点都标记为噪声
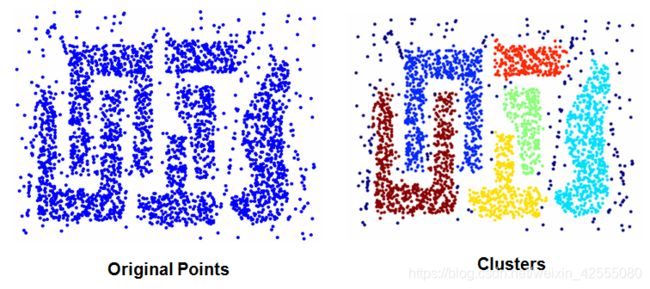
三 DBSCAN的Python实例
用sklearn.datasets库中的方法,绘制了6000个二维样本点,然后利用DBSCAN算法实现样本点的聚类:
from sklearn import datasets
import numpy as np
import random
import matplotlib.pyplot as plt
import time
plt.rcParams['font.sans-serif']=['SimHei']
plt.rcParams['axes.unicode_minus']=False
def findNeighbor(j,X,eps):
N=[]
for p in range(X.shape[0]): #找到所有领域内对象
temp=np.sqrt(np.sum(np.square(X[j]-X[p]))) #欧氏距离
if(temp<=eps):
N.append(p)
return N
def dbscan(X,eps,min_Pts):
k=-1
NeighborPts=[] #array,某点领域内的对象
Ner_NeighborPts=[]
fil=[] #初始时已访问对象列表为空
gama=[x for x in range(len(X))] #初始时将所有点标记为未访问
cluster=[-1 for y in range(len(X))]
while len(gama)>0:
j=random.choice(gama)
gama.remove(j) #未访问列表中移除
fil.append(j) #添加入访问列表
NeighborPts=findNeighbor(j,X,eps)
if len(NeighborPts) < min_Pts:
cluster[j]=-1 #标记为噪声点
else:
k=k+1
cluster[j]=k
for i in NeighborPts:
if i not in fil:
gama.remove(i)
fil.append(i)
Ner_NeighborPts=findNeighbor(i,X,eps)
if len(Ner_NeighborPts) >= min_Pts:
for a in Ner_NeighborPts:
if a not in NeighborPts:
NeighborPts.append(a)
if (cluster[i]==-1):
cluster[i]=k
return cluster
def generatorData():
X1, y1=datasets.make_circles(n_samples=5000, factor=.6,
noise=.05)
X2, y2 = datasets.make_blobs(n_samples=1000, n_features=2, centers=[[1.2,1.2]], cluster_std=[[.1]],
random_state=9)
X = np.concatenate((X1, X2))
return X
if __name__=='__main__':
eps=0.08
min_Pts=10
begin=time.time()
X = generatorData()
C=dbscan(X,eps,min_Pts)
end=time.time()
plt.figure(figsize=(12, 9), dpi=80)
plt.scatter(X[:,0],X[:,1],c=C)
plt.show()
print("DBSCAN算法用时:",end-begin)
结果:
DBSCAN算法用时:328.9198133945465
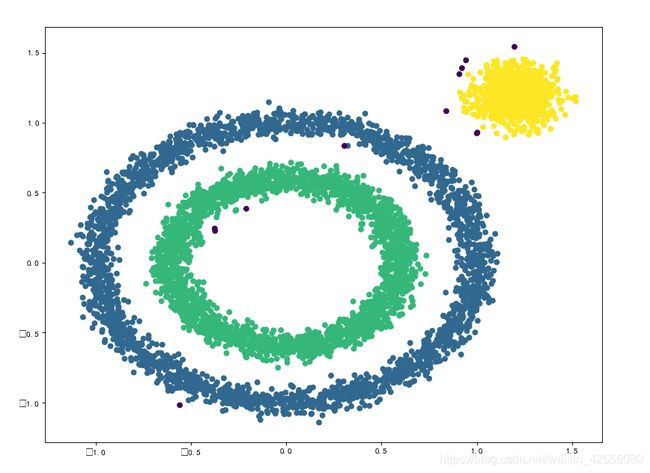
可以说DBSCAN的算法是非常吃GPU和CPU的,运行上述代码时,我的联想小新V1000系列的电脑嗡嗡作响!!!!主要是,该算法,首先要计算每个点的欧氏距离,然后在计算进行比较,时间复杂度较大!!!
四 总结
可以说,虽然DBSCAN在解决密度和噪声点问题上较为优秀,但是实际上DBSCAN HAS A LONG WAY TO GO!!!!!比如:减少参数、参数的自动化;合适密度函数(高斯、混合密度、反向K近邻等);如何对多密度、变化密度的数据集聚类;如何提高聚类的精度;高维、大规模数据集聚类技术等
这篇文章就到这里了,欢迎大佬们多批评指正,也欢迎大家积极评论多多交流。

参考文章
1 DBSCAN算法简介及Python实现
2 鸢尾花三种聚类算法(K-means,AGNES,DBScan)的python实现