多帧三角化原理
1. 概述
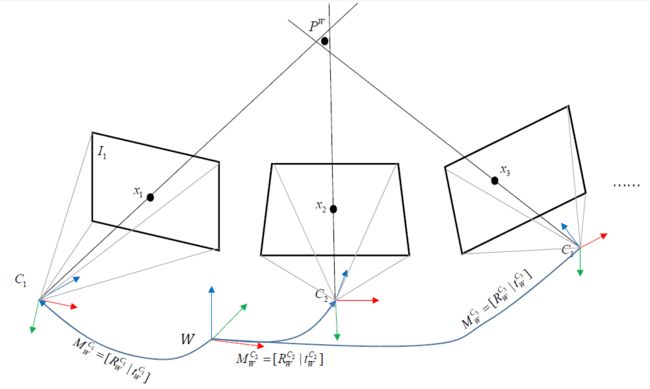
多帧三角化就是在已知多帧图像2D观测![]() ,相机内参矩阵K,以及每个观测图像帧的相机位姿
,相机内参矩阵K,以及每个观测图像帧的相机位姿![]() (从世界坐标系
(从世界坐标系 到相机坐标系
到相机坐标系 ,相机坐标系是右下前,即光心与图像中心的连线是Z轴,图像的宽度方向是X轴,图像高度方向是Y轴)的情况下求解出3D点在世界坐标系下的位置p的过程,这里的多帧
,相机坐标系是右下前,即光心与图像中心的连线是Z轴,图像的宽度方向是X轴,图像高度方向是Y轴)的情况下求解出3D点在世界坐标系下的位置p的过程,这里的多帧![]() 。
。
2. 原理
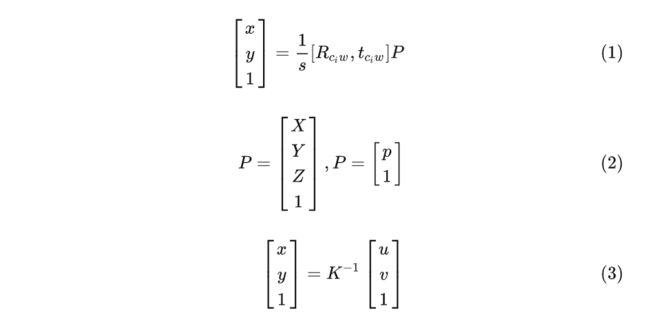
一个3D点在每个图像观测帧中有下面公式(1)所示的约束,公式(1)等式左边是2D观测的归一化坐标,归一化坐标可以通过公式(3)求得,s是在该相机坐标系下3D点的深度信息,P是3D点的齐次形式。
多帧三角化还是用到了构建超定方程 或者
或者![]() 的形式来求解,下面就讲怎么构建这两种形式。
的形式来求解,下面就讲怎么构建这两种形式。
2.1. 齐次方法
先讲![]() 的形式,对公式(1)中
的形式,对公式(1)中![]() 用
用![]() 进行表示,
进行表示,![]() ,
,![]() ,
,![]() ,
,![]() 表示该矩阵的第1、2、3行。因此对公式(1)进行变型可以得到公式(4)。
表示该矩阵的第1、2、3行。因此对公式(1)进行变型可以得到公式(4)。

然后对公式(4)两边都叉乘2D观测的归一化坐标,得到公式(5),其中叉乘可以通过公式(6)表示,然后通过公式(5)可以得到公式(7)所示三个等式,用矩阵表示这三个等式就是公式(8)所示的矩阵,因为公式(8)所示的矩阵中的三行只有两行是线性独立的,所以只用其中任意两行就构成了超定方程A中的两行,当有n个观测帧时就可以构建成一个![]() 的A矩阵。
的A矩阵。

那么A矩阵做奇异值分解后最小奇异值对应的单位向量V就是就解,但是这里有一个比较特殊的就是P是一个齐次形式,因此需要将V齐次化(![]() ),这样就可以得到p。当对含有观测噪声的数据做最小二乘求解时,求得的
),这样就可以得到p。当对含有观测噪声的数据做最小二乘求解时,求得的![]() 可能是一个非常接近于0的值,那么算出的p点就是一个无穷远的点。因此齐次方法可能会存在这样的问题。那下面看一下非齐次的方法。
可能是一个非常接近于0的值,那么算出的p点就是一个无穷远的点。因此齐次方法可能会存在这样的问题。那下面看一下非齐次的方法。
2.2. 非齐次方法
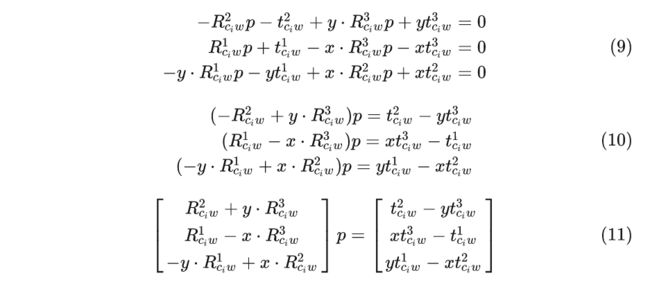
非齐次方法就是对上面公式(5)变型成另外的形式,将![]() 用
用![]() 代替,P用
代替,P用![]() 代替,那么我们就可以得到公式(9)所示的三个等式,然后将其整理成公式(10),最后得到公式(11)所示的矩阵形式,因为同样公式(11)的三行中只有两行是线性独立的,所以选择公式(11)中任意两行构成超定方程中的两行,当有n个观测帧时就可以构建成一个
代替,那么我们就可以得到公式(9)所示的三个等式,然后将其整理成公式(10),最后得到公式(11)所示的矩阵形式,因为同样公式(11)的三行中只有两行是线性独立的,所以选择公式(11)中任意两行构成超定方程中的两行,当有n个观测帧时就可以构建成一个![]() 的 A矩阵,和
的 A矩阵,和![]() 的b矩阵。因此得到最小二乘解
的b矩阵。因此得到最小二乘解![]() 就是3D点p。
就是3D点p。
3. 代码
import numpy as np
import math
class Triangulation:
def __init__(self, camera_matrix):
# calibration matrix
self._camera_matrix = camera_matrix
self.projections = {}
for (camera_name, _) in camera_matrix.items():
self.projections[camera_name] = []
self.A = None # Ax = b
self.b = None
def add_projection(self, camera_name, pose_camera_world, projection):
self.projections[camera_name].append((pose_camera_world, projection))
def compute_error(self, Pw):
errors = []
for (camera_name, projections) in self.projections.items():
for (pose_camera_world, projection) in projections:
K = self._camera_matrix[camera_name]
R = pose_camera_world[0:3, 0:3]
t = pose_camera_world[0:3, 3:4]
Pc = np.matmul(R, Pw) + t
Pc[0][0] /= Pc[2][0]
Pc[1][0] /= Pc[2][0]
Pc[2][0] = 1
Puv = np.matmul(K, Pc)
Euv = Puv - np.array([[projection[0]], [projection[1]], [1]])
error = np.matmul(np.transpose(Euv), Euv)[0][0]
errors.append(math.sqrt(error))
return errors
def triangulate(self):
number_projections = 0
for (camera_name, projections) in self.projections.items():
number_projections += len(projections)
if number_projections < 2:
return np.array([[0], [0]])
# assign memory
self.A = np.zeros((number_projections * 2, 3))
self.b = np.zeros((number_projections * 2, 1))
index = 0
for (camera_name, projections) in self.projections.items():
for (pose_camera_world, projection) in projections:
(A, b) = self._compute_equation(camera_name, pose_camera_world, projection)
self.A[index:index+2, :] = A[0:2, :]
self.b[index:index+2, :] = b[0:2, :]
index += 2
At = np.transpose(self.A)
AtA = np.matmul(At, self.A)
Atb = np.matmul(At, self.b)
return np.matmul(np.linalg.inv(AtA), Atb)
def skew(self, v):
x = v[0][0]
y = v[1][0]
z = v[2][0]
m = np.array([[0., -z, y], [z, 0., -x], [-y, x, 0.]])
return m
def _compute_equation(self, camera_name, pose_camera_world, projection):
K = self._camera_matrix[camera_name]
R = pose_camera_world[0:3, 0:3]
t = pose_camera_world[0:3, 3:4]
Puv = np.array([[projection[0]], [projection[1]], [1]])
Pc = np.matmul(np.linalg.inv(K), Puv)
Pcx = self.skew(Pc)
A = np.matmul(-Pcx, R)
b = np.matmul(Pcx, t)
return A, b
参考文献
多帧三角化原理 - 知乎
三角化 - MKT-porter - 博客园