刘二大人《PyTorch深度学习实践》卷积神经网络提升篇
课程请见 《PyTorch深度学习实践》
# PyTorch
# PyTorch
import torch
from torchvision import datasets
from torchvision import transforms
from torch.utils import data
from torch import optim
from torch import nn
# For plotting
import matplotlib.pyplot as plt
import os
os.environ["KMP_DUPLICATE_LIB_OK"] = "TRUE"
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))
])
train_data = datasets.MNIST(download=False, root='../data', train=True, transform=transform)
test_data = datasets.MNIST(download=False, root='../data', train=False, transform=transform)
batch_size = 64
train_iter = data.DataLoader(
dataset=train_data,
batch_size=batch_size,
shuffle=True
)
test_iter = data.DataLoader(
dataset=test_data,
batch_size=batch_size,
shuffle=False
)
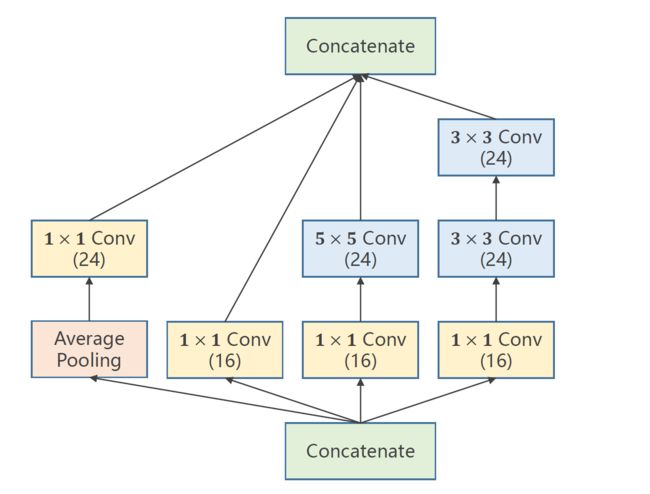
class Inception(nn.Module):
# Inception (B, C, H, W) -> (B, 88, H, W)
def __init__(self, input_channels):
super(Inception, self).__init__()
self.branch_pool = nn.Conv2d(input_channels, 24, kernel_size=(1, 1))
self.branch1x1 = nn.Conv2d(input_channels, 16, kernel_size=(1, 1))
self.branch5x5_1 = nn.Conv2d(input_channels, 16, kernel_size=(1, 1))
self.branch5x5_2 = nn.Conv2d(16, 24, kernel_size=(5, 5), padding=2)
self.branch3x3_1 = nn.Conv2d(input_channels, 16, kernel_size=(1, 1))
self.branch3x3_2 = nn.Conv2d(16, 24, kernel_size=(3, 3), padding=1)
self.branch3x3_3 = nn.Conv2d(24, 24, kernel_size=(3, 3), padding=1)
def forward(self, x):
pooling = nn.AvgPool2d(kernel_size=3, stride=1, padding=1)
x1 = self.branch_pool(pooling(x))
x2 = self.branch1x1(x)
x3 = self.branch5x5_1(x)
x3 = self.branch5x5_2(x3)
x4 = self.branch3x3_1(x)
x4 = self.branch3x3_2(x4)
x4 = self.branch3x3_3(x4)
return torch.cat([x1, x2, x3, x4], dim=1)
class Module(nn.Module):
def __init__(self):
super(Module, self).__init__()
self.conv1 = nn.Conv2d(1, 10, kernel_size=(5, 5))
self.conv2 = nn.Conv2d(88, 20, kernel_size=(5, 5))
self.incep1 = Inception(input_channels=10)
self.incep2 = Inception(input_channels=20)
self.pooling = nn.MaxPool2d(2)
self.linear = nn.Linear(1408, 10)
self.activate = nn.ReLU()
def forward(self, x):
batch_size = x.shape[0]
x = self.activate(self.pooling(self.conv1(x)))
x = self.incep1(x)
x = self.activate(self.pooling(self.conv2(x)))
x = self.incep2(x)
x = x.reshape(batch_size, -1)
x = self.linear(x)
return x
def test(net, test_iter):
with torch.no_grad():
correct = 0
total = 0
for x, y in test_iter:
_y = net(x)
_, pre = torch.max(_y, dim=1)
correct += (y == pre).sum().item()
total += y.shape[0]
return correct / total
net = Module()
lr = 0.01
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(net.parameters(), lr=lr)
num_epochs = 20
cr_set = []
for epoch in range(num_epochs):
for x, y in train_iter:
_y = net(x)
loss = criterion(_y, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
cr = test(net, test_iter)
cr_set.append(cr)
print("第{}轮,正确率是{}".format(epoch + 1, cr))
plt.figure()
plt.plot(list(range(num_epochs)), cr_set)
plt.xlabel('Epoch')
plt.ylabel('Correct Rate')
plt.show()
