决策树算法原理(ID3,C4.5)
CART回归树
决策树的剪枝
在决策树算法原理(ID3,C4.5)中,提到C4.5的不足,比如模型是用较为复杂的熵来度量,使用了相对较为复杂的多叉树,只能处理分类不能处理回归。对这些问题,CART(Classification And Regression Tree)做了改进,可以处理分类,也可以处理回归。
1. CART分类树算法的最优特征选择方法
ID3中使用了信息增益选择特征,增益大优先选择。C4.5中,采用信息增益比选择特征,减少因特征值多导致信息增益大的问题。CART分类树算法使用基尼系数来代替信息增益比,基尼系数代表了模型的不纯度,基尼系数越小,不纯度越低,特征越好。这和信息增益(比)相反。
假设K个类别,第k个类别的概率为pk,概率分布的基尼系数表达式:
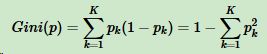
如果是二分类问题,第一个样本输出概率为p,概率分布的基尼系数表达式为:
![]()
对于样本D,个数为|D|,假设K个类别,第k个类别的数量为|Ck|,则样本D的基尼系数表达式:
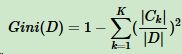
对于样本D,个数为|D|,根据特征A的某个值a,把D分成|D1|和|D2|,则在特征A的条件下,样本D的基尼系数表达式为:

比较基尼系数和熵模型的表达式,二次运算比对数简单很多。尤其是二分类问题,更加简单。
和熵模型的度量方式比,基尼系数对应的误差有多大呢?对于二类分类,基尼系数和熵之半的曲线如下:
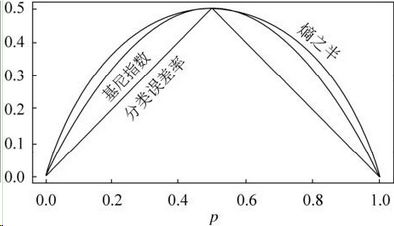
基尼系数和熵之半的曲线非常接近,仅在45度角附近误差稍大。因此,基尼系数可以做为熵模型的一个近似替代。
CART分类树算法每次仅对某个特征的值进行二分,而不是多分,这样CART分类树算法建立起来的是二叉树,而不是多叉树。
2. CART分类树算法对连续特征和离散特征的处理
CART分类树算法对连续值的处理,思想和C4.5相同,都是将连续的特征离散化。唯一区别在选择划分点时,C4.5是信息增益比,CART是基尼系数。
具体思路:m个样本的连续特征A有m个,从小到大排列a1,a2,......,am,则CART取相邻两样本值的平均数做划分点,一共取m-1个,其中第i个划分点Ti表示为:Ti = (ai + ai+1)/2。分别计算以这m-1个点作为二元分类点时的基尼系数。选择基尼系数最小的点为该连续特征的二元离散分类点。比如取到的基尼系数最小的点为at,则小于at的值为类别1,大于at的值为类别2,这样就做到了连续特征的离散化。
注意的是,与ID3、C4.5处理离散属性不同的是,如果当前节点为连续属性,则该属性在后面还可以参与子节点的产生选择过程。
CART分类树算法对离散值的处理,采用的思路:不停的二分离散特征。
在ID3、C4.5,特征A被选取建立决策树节点,如果它有3个类别A1,A2,A3,我们会在决策树上建立一个三叉点,这样决策树是多叉树。
CART采用的是不停的二分。会考虑把特征A分成{A1}和{A2,A3}、{A2}和{A1,A3}、{A3}和{A1,A2}三种情况,找到基尼系数最小的组合,比如{A2}和{A1,A3},然后建立二叉树节点,一个节点是A2对应的样本,另一个节点是{A1,A3}对应的样本。由于这次没有把特征A的取值完全分开,后面还有机会对子节点继续选择特征A划分A1和A3。这和ID3、C4.5不同,在ID3或C4.5的一颗子树中,离散特征只会参与一次节点的建立。
3. CART分类树算法具体流程
CART分类树建立算法流程,之所以加上建立,是因为CART分类树算法有剪枝。
算法输入训练集D,基尼系数的阈值,样本个数阈值。
输出的是决策树T。
算法从根节点开始,用训练集递归建立CART分类树。
(1)、对于当前节点的数据集为D,如果样本个数小于阈值或没有特征,则返回决策子树,当前节点停止递归。
(2)、计算样本集D的基尼系数,如果基尼系数小于阈值,则返回决策树子树,当前节点停止递归。
(3)、计算当前节点现有的各个特征的各个特征值对数据集D的基尼系数,对于离散值和连续值的处理方法和基尼系数的计算见第二节。缺失值的处理方法和C4.5算法里描述的相同。
(4)、在计算出来的各个特征的各个特征值对数据集D的基尼系数中,选择基尼系数最小的特征A和对应的特征值a。根据这个最优特征和最优特征值,把数据集划分成两部分D1和D2,同时建立当前节点的左右节点,做节点的数据集D为D1,右节点的数据集D为D2。
(5)、对左右的子节点递归的调用1-4步,生成决策树。
对生成的决策树做预测的时候,假如测试集里的样本A落到了某个叶子节点,而节点里有多个训练样本。则对于A的类别预测采用的是这个叶子节点里概率最大的类别。
4. CART回归树建立算法
CART回归树
CART回归树和CART分类树的建立类似,这里只说不同。
(1)、分类树与回归树的区别在样本的输出,如果样本输出是离散值,这是分类树;样本输出是连续值,这是回归树。分类树的输出是样本的类别,回归树的输出是一个实数。
(2)、连续值的处理方法不同。
(3)、决策树建立后做预测的方式不同。
分类模型:采用基尼系数的大小度量特征各个划分点的优劣。
回归模型:采用和方差度量,度量目标是对于划分特征A,对应划分点s两边的数据集D1和D2,求出使D1和D2各自集合的均方差最小,同时D1和D2的均方差之和最小。表达式为:

其中,c1为D1的样本输出均值,c2为D2的样本输出均值。
对于决策树建立后做预测的方式,CART分类树采用叶子节点里概率最大的类别作为当前节点的预测类别。回归树输出不是类别,采用叶子节点的均值或者中位数来预测输出结果。
5、CART树算法的剪枝
CART树的生成:基于训练数据集,递归构建二叉决策树。CART树的剪枝:用验证数据集对生成的树进行剪枝并选择最优子树,损失函数最小作为剪枝的标准。
CART分类树的剪枝策略在度量损失的时候用基尼系数;CART回归树的剪枝策略在度量损失的时候用均方差。
决策树很容易对训练集过拟合,导致泛化能力差,所以要对CART树进行剪枝,即类似线性回归的正则化。CART采用后剪枝法,即先生成决策树,然后产生所有剪枝后的CART树,然后使用交叉验证检验剪枝的效果,选择泛化能力最好的剪枝策略。
剪枝损失函数表达式:![]()
α为正则化参数(和线性回归的正则化一样),C(Tt)为训练数据的预测误差,|Tt|是子树T叶子节点数量。
当α = 0时,即没有正则化,原始生成的CART树即为最优子树。当α = ∞时,正则化强度最大,此时由原始的生成CART树的根节点组成的单节点树为最优子树。当然,这是两种极端情况,一般来说,α越大,剪枝剪的越厉害,生成的最优子树相比原生决策树就越偏小。对于固定的α,一定存在使得损失函数Cα(Tt)最小的唯一子树。
剪枝的思路:
对于位于节点t的任意一颗子树Tt,如果没有剪枝,损失函数是:
![]()
如果将其剪掉,仅保留根节点,损失函数是:
![]()
当α = 0或α很小,![]() ,当α增大到一定程度时
,当α增大到一定程度时
![]()
当α继续增大时不等式反向,即满足下式:
![]()
Tt和T有相同的损失函数,但T节点更少,因此可以对子树Tt进行剪枝,也就是将它的子节点全部剪掉,变为一个叶子结点T。
交叉验证策略:
如果我们把所有节点是否剪枝的值α都计算出来,然后针对不同α对应的剪枝后的最优子树做交叉验证。这样可以选择最好的α,有了这个α,用对应的最优子树作为最终结果。
有了上面的思路,CART树的剪枝算法:
输入是CART树建立算法得到的原始决策树T。
输出是最优决策树Tα。
算法过程:
(1)、初始化αmin = ∞,最优子树集合ω = {T}。
(2)、从叶子结点开始自下而上计算内部节点 t 的训练误差损失函数Cα(Tt)(回归树为均方差,分类树为基尼系数),叶子节点数|Tt|,以及正则化阈值![]() ,更新αmin = α
,更新αmin = α
(3)、得到所有节点的α值得集合M。
(4)、从M中选择最大的值αk,自上而下的访问子树 t 的内部节点,如果![]() 时,进行剪枝。并决定叶子节点 t 的值。如果是分类树,这是概率最高的类别,如果是回归树,这是所有样本输出的均值。这样得到αk对应的最优子树Tk
时,进行剪枝。并决定叶子节点 t 的值。如果是分类树,这是概率最高的类别,如果是回归树,这是所有样本输出的均值。这样得到αk对应的最优子树Tk
(5)、最优子树集合ω = ωυTk,M = M - {αk}。
(6)、如果M不为空,则回到步骤4。否则就已经得到了所有的可选最优子树集合ω。
(7)、采用交叉验证在ω选择最优子树Tα。
6. CART算法小结
| 算法 | 支持模型 | 树结构 | 特征选择 | 连续值处理 | 缺失值处理 | 剪枝 |
| ID3 | 分类 | 多叉树 | 信息增益 | 不支持 | 不支持 | 不支持 |
| C4.5 | 分类 | 多叉树 | 信息增益比 | 支持 | 支持 | 支持 |
| CART | 分类回归 | 二叉树 | 基尼系数 均方差 |
支持 | 支持 | 支持 |
ωCART算法缺点:
(1)、无论ID3,C4.5,CART都是选择一个最优的特征做分类决策,但大多数,分类决策不是由某一个特征决定,而是一组特征。这样得到的决策树更加准确,这种决策树叫多变量决策树(multi-variate decision tree)。在选择最优特征的时,多变量决策树不是选择某一个最优特征,而是选择一个最优的特征线性组合做决策。代表算法OC1。
(2)、样本一点点改动,树结构剧烈改变。这个通过集成学习里面的随机森林之类的方法解决。
7. 决策树算法小结
这里不纠结ID3、C4.5、CART,这部分来自scikit-learn英文文档。
优点:
- 简单直观,生成的决策树很直观。
- 基本不需要预处理,不需要提前归一化和处理缺失值。
- 使用决策树预测的代价是O(log2m)。m为样本数。
- 既可以处理离散值也可以处理连续值。很多算法只是专注于离散值或者连续值。
- 可以处理多维度输出的分类问题。
- 相比于神经网络之类的黑盒分类模型,决策树在逻辑上可以很好解释。
- 可以交叉验证的剪枝来选择模型,从而提高泛化能力。
- 对于异常点的容错能力好,健壮性高。
缺点:
- 决策树算法非常容易过拟合,导致泛化能力不强。可以通过设置节点最少样本数量和限制决策树深度来改进。
- 决策树会因为样本发生一点的改动,导致树结构的剧烈改变。这个可以通过集成学习之类的方法解决。
- 寻找最优的决策树是一个NP难题,我们一般是通过启发式方法,容易陷入局部最优。可以通过集成学习的方法来改善。
- 有些比较复杂的关系,决策树很难学习,比如异或。这个就没有办法了,一般这种关系可以换神经网络分类方法来解决。
- 如果某些特征的样本比例过大,生成决策树容易偏向于这些特征。这个可以通过调节样本权重来改善。