【目标检测】YOLOV5详解
1、网络架构
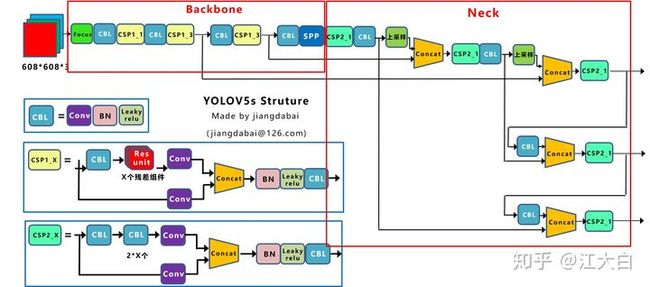
YOLOV5和YOLOV4有很多相同的地方,最大的改变还是基础架构的变化。Yolov5官方代码中,给出的目标检测网络中一共有4个版本,分别是Yolov5s、Yolov5m、Yolov5l、Yolov5x四个模型。首先先看一下YOLOV5s的网络架构。
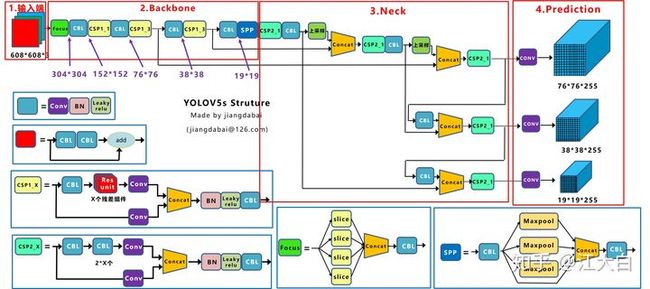
上图即Yolov5的网络结构图,可以看出,还是分为输入端、Backbone、Neck、Prediction四个部分。
(1)输入端:Mosaic数据增强、自适应锚框计算、自适应图片缩放
(2)Backbone:Focus结构,CSP结构
(3)Neck:FPN+PAN结构
(4)Prediction:GIOU_Loss
下面丢上Yolov5作者的算法性能测试图:
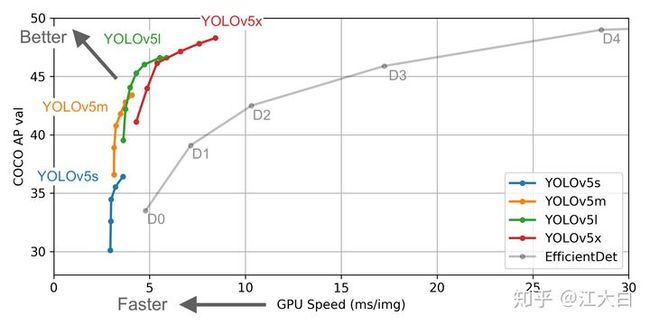
Yolov5作者也是在COCO数据集上进行的测试,大白在之前的文章讲过,COCO数据集的小目标占比,因此最终的四种网络结构,性能上来说各有千秋。Yolov5s网络最小,速度最少,AP精度也最低。但如果检测的以大目标为主,追求速度,倒也是个不错的选择。其他的三种网络,在此基础上,不断加深加宽网络,AP精度也不断提升,但速度的消耗也在不断增加。
2、输入端
Yolov5的输入端采用了和Yolov4一样的Mosaic数据增强的方式。随机缩放、随机裁剪、随机排布的方式进行拼接,对于小目标的检测效果还是很不错的。这些已经在上一篇文章YOLOV4中讲过了。

在常用的目标检测算法中,不同的图片长宽都不相同,因此常用的方式是将原始图片统一缩放到一个标准尺寸,再送入检测网络中。
比如Yolo算法中常用416*416,608*608等尺寸,比如对下面800*600的图像进行缩放。

但Yolov5代码中对此进行了改进,也是Yolov5推理速度能够很快的一个不错的trick。作者认为,在项目实际使用时,很多图片的长宽比不同,因此缩放填充后,两端的黑边大小都不同,而如果填充的比较多,则存在信息冗余,影响推理速度。因此在Yolov5的代码中datasets.py的letterbox函数中进行了修改,对原始图像自适应的添加最少的黑边。

图像高度上两端的黑边变少了,在推理时,计算量也会减少,即目标检测速度会得到提升。在讨论中,通过这种简单的改进,推理速度得到了37%的提升,可以说效果很明显。
第一步:计算缩放比例
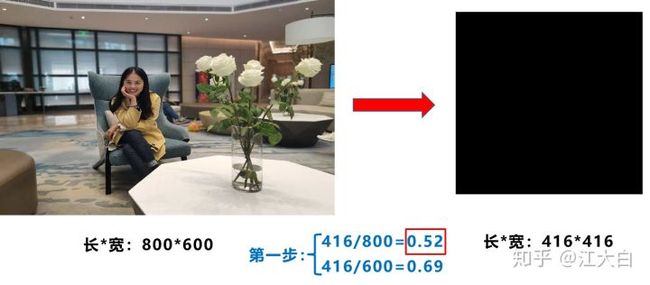
原始缩放尺寸是416*416,都除以原始图像的尺寸后,可以得到0.52,和0.69两个缩放系数,选择小的缩放系数。
第二步:计算缩放后的尺寸
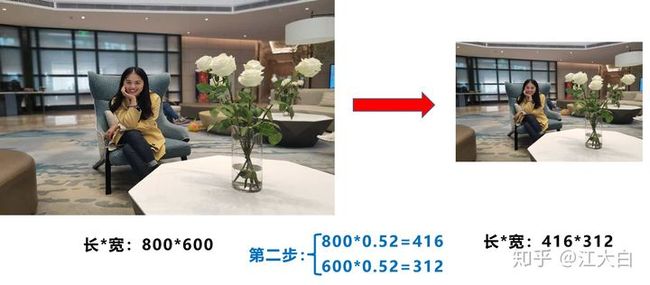
原始图片的长宽都乘以最小的缩放系数0.52,宽变成了416,而高变成了312。
第三步:计算黑边填充数值
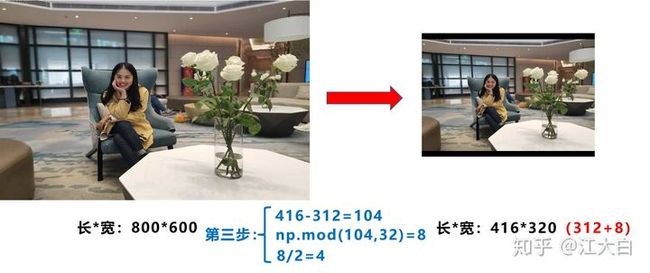
将416-312=104,得到原本需要填充的高度。再采用numpy中np.mod取余数的方式,得到8个像素,再除以2,即得到图片高度两端需要填充的数值。
此外,需要注意的是:
a.Yolov5中填充的是灰色,即(114,114,114)。
b.训练时没有采用缩减黑边的方式,还是采用传统填充的方式,即缩放到416*416大小。只是在测试,使用模型推理时,才采用缩减黑边的方式,提高目标检测,推理的速度。
c.为什么np.mod函数的后面用32?因为Yolov5的网络经过5次下采样,而2的5次方,等于32。所以至少要去掉32的倍数,再进行取余。
3、backbone
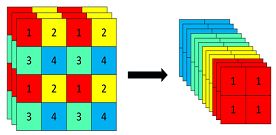
Focus模块在v5中是图片进入backbone前,对图片进行切片操作,具体操作是在一张图片中每隔一个像素拿到一个值,类似于邻近下采样,这样就拿到了四张图片,四张图片互补,长的差不多,但是没有信息丢失,这样一来,将W、H信息就集中到了通道空间,输入通道扩充了4倍,即拼接起来的图片相对于原先的RGB三通道模式变成了12个通道,最后将得到的新图片再经过卷积操作,最终得到了没有信息丢失情况下的二倍下采样特征图。
以yolov5s为例,原始的640 × 640 × 3的图像输入Focus结构,采用切片操作,先变成320 × 320 × 12的特征图,再经过一次卷积操作,最终变成320 × 320 × 32的特征图。切片操作如下:
这个结构据作者说是能够增加推理速度。
Yolov5与Yolov4不同点在于,Yolov4中只有主干网络使用了CSP结构。
而Yolov5中设计了两种CSP结构,以Yolov5s网络为例,CSP1_X结构应用于Backbone主干网络,另一种CSP2_X结构则应用于Neck中。
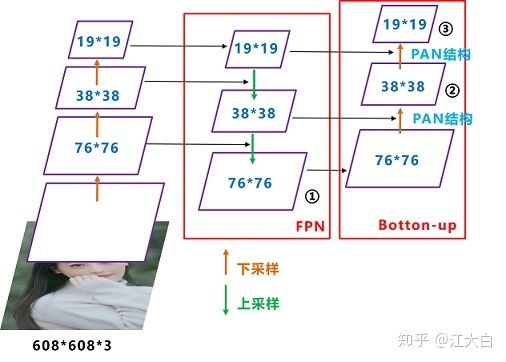
4、neck和输出
Yolov5现在的Neck和Yolov4中一样,都采用FPN+PAN的结构。
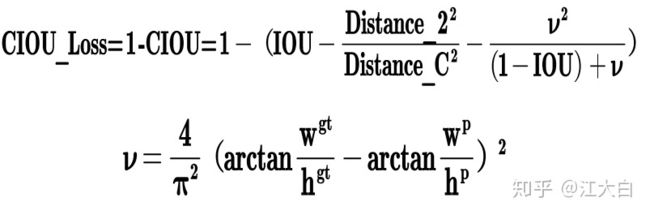
Yolov5中采用其中的CIOU_Loss做Bounding box的损失函数。

Yolov4中也采用CIOU_Loss作为目标Bounding box的损失。
参考: 深入浅出Yolo系列之Yolov5核心基础知识完整讲解 - 知乎