超全汇总 | 基于Camera的3D目标检测算法综述!(单目/双目/伪激光雷达)
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心技术交流群
后台回复【数据集下载】获取计算机视觉近30种数据集!
目前3D目标检测领域方案主要包括基于单目、双目、激光雷达点云、多模态数据融合等方式,本文主要介绍基于单目、双目和伪激光雷达数据的相关算法,下面展开讨论下~
3D检测任务介绍
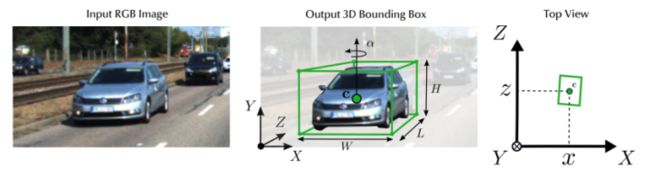
3D检测任务一般通过图像、点云等输入数据,预测目标相比于相机或lidar坐标系的[x,y,z]、[h,w,l],[θ,φ,ψ](中心坐标,box长宽高信息,相对于xyz轴的旋转角度)。
基于单目数据的3D检测
与基于激光雷达的方法相比,仅从图像估计3D边界框的方法面临更大的挑战,因为从2D输入数据恢复3D信息是一个不适定问题。
Deep3DBox
Deep3DBox是论文3D Bounding Box Estimation Using Deep Learning and Geometry中的方法,被CVPR2017收录,首先使用网络回归出相对稳定的3D目标的特性,再利用估计出来的3D特征和由2D bounding box转换为3D bounding box时的几何约束来产生最终的结果。文章先回归方向和尺寸,再结合几何约束产生3D位姿。Deep3DBox能从单目中恢复3D距离尺寸信息,但是它需要学习全连接层的参数,与使用附加信息的方法相比,需要更多的训练数据。GS3D是CVPR2019上的一篇paper,论文发现3D的大致的位置其实是可以从2D检测以及一些先验知识中进行恢复的,(这些先验知识包含了3D-2D的投影矩阵),因此作者设计了有效的算法,通过2D的检测去获取一个基本的长方体,而这个长方体可以引导我们去确定3D物体的尺寸,称为Guidance。除此之外,基本的3D信息可以被使用(通过使用3D bbox投影之后在2D图像上的surface等细节)。基于上述的观察,作者认为更进一步的分类以及回归的网络对bbox进行refinement对于减少FP以及回归的精度是非常必要的。论文使用CNN预测目标物的2D BBox,观察角,并根据先验知识(物体的长宽高、3D框底面中心在2D下边框中心偏上)和相机内参矩阵求得物体在相机坐标系下的3D坐标,根据3D坐标位置和观察角得到物体可视面,并将其投影至2D特征平面提取特征进一步优化3D预测框结果,如下图所示!

SMOKE
SMOKE是纵目科技在2020年提出的单目3D检测新方法,论文展示了一种新的3D目标检测方法,该方法通过将单个关键点估计与回归3D变量相结合来预测每个检测到的目标3D bounding box。SMOKE延续了centernet的key-point做法,认为2d检测模块是多余的,只保留了3d检测模块,预测投影下来的3dbox中心点和其他属性变量得到3dbox。整体来说SMOKE框架简洁,性能当年还算不错,推理速度快,部署起来方便!

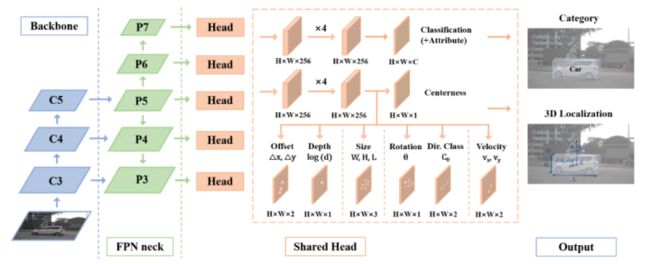
FCOS3D
FCOS3D是基于 FCOS 改进的 3d 目标检测方案,在 NeurIPS 2020 中的nuScenes 3d 检测比赛上取得了第一名成绩,论文将 7-DoF 3D 目标解耦为 2D 和 3D 的属性,考虑到目标的二维比例,将目标分布到不同的特征级别,并仅根据训练过程的投影三维中心进行分配,除此之外,centerness 根据三维中心重新定义为二维高斯分布,以适应三维目标公式,网络结构如下所示:
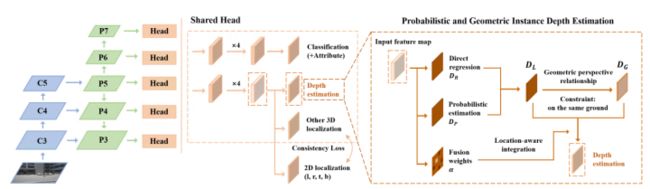
FCOS3D++
FCOS3D++是CoRL 2021的单目三维目标检测算法,继承FCOS3D思路,论文提出单目三维目标检测可以简化为实例深度估计问题。不精确的实例深度估计阻碍了所有其他三维特性预测,限制了整体检测性能提高。前面的工作直接基于孤立的实例或者像素估计深度,忽略了不同目标之间的几何关系。因此,FCOS3D++构建了预测的目标之间的几何关系图,促进深度预测。FCOS3D++结合概率表示来捕获深度估计的不确定性,首先将深度值划分为一系列离散的区间,然后通过分布的期望来计算深度值,从分布中得到的top-k的置信度的平均值视作深度的不确定性。为了建模几何关系,构建了一个深度传播图来利用上下文信息促进深度估计。每个实例深度的不确定性为实例深度传播提供了有效指引。利用这一整体机制,可以很容易地利用高置信度确定预测。更重要的是,利用基于图的协同机制可以更精确地预测深度。论文提出的方法在KITTI和nuScenes基准上单目第一!
MonoFlex
MonoFlex作者考虑到了目标的截断属性,提出了一种灵活的单目3D目标检测框架,使用边缘特征解耦了截断目标和正常目标,分开处理,在比较重要的深度估计方面,作者使用了直接预测法、基于关键点的几何计算法,同时结合不确定性,使深度估计的更准确。也是引入深度估计来提升单目3D检测性能!KITTI上SOTA!
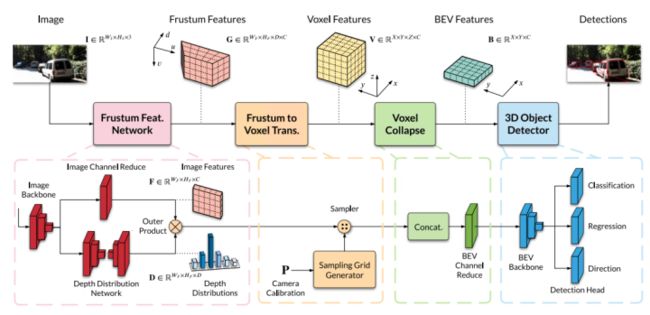
CaDDN
单目3D检测通常会生成中间的特征表示形式,主要可以划分为以下三类:
直接法(Direct Methods): 结合2D图像平面和3D空间的几何关系从图像中估计出3D检测框。直接法的缺点也比较明显,由于检测框直接从2D图像中获取,没有明确的深度信息,因此定位能力相对较差。
基于深度的方法(Depth-Based Methods): 利用深度估计网络估计出图像的中每个像素对应的深度图,再将深度图直接作为输入or与原图结合or转换成3D点云数据(伪激光雷达Pseudo-LiDAR)用于3D目标检测任务。该方法的缺点是其深度和目标检测分离训练的结构,导致其可能会丢失一些隐含的信息。
基于网格的方法(Grid-Based Methods) : 通过预测出BEV网格表示替代通过深度估计作为3D检测输入的方法,通常转化步骤是通过利用体素网格把体素投影到图像平面上然后采样图像特征将其转换成BEV的形式。这种方法可能会导致大量体素和特征的重叠从而降低检测的准确性。
CaDDN 网络尝试结合以上方法的长处,整体网络同时训练深度预测和3D检测以期待其能够解决基于深度的方法中的问题,同时利用也将图像平面转换成了BEV的形式来提高检测的准确性。
MonoRCNN
单目3D目标检测的核心难点是估计目标的距离,MonoRCNN提出了一个基于几何的距离分解方法,将目标距离分解为与目标的物理高度(physical height)和图像平面上的投影高度(visual height)相关的量,使得距离的估计具有可解释性,精度和鲁棒性也更高;除此之外,论文还对导致距离估计不确定性的原因进行了理论和实验分析。
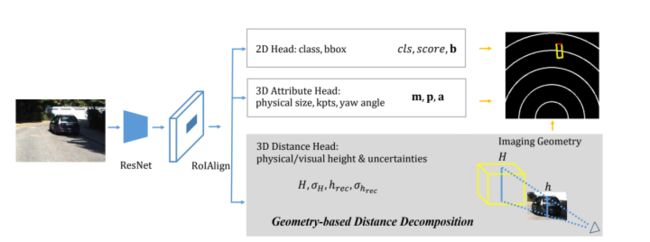
论文所提出来的基于分解的目标距离估计方案,本质上还是在自动驾驶中的一些前提假设(如目标只有yaw angle的变化)下,选取一些受未知参数影响较小的量作为网络学习的预测值,从而计算距离,这种学习方法与先前的一些工作选择预测目标尺寸一脉相承,但是论文中把距离的预测与目标的高度关联起来,还是很有创新的,这个思路应该还可以继续挖掘。另外论文中选择将不确定性引入进来做多任务优化提升性能,也是以往工作在单目3D目标检测领域的体现。
基于伪激光雷达数据
主要有Pseudo-LiDAR、Pseudo-LiDAR++、E2E Pseudo-LiDAR,伪激光雷达方法本质是还是通过深度图生成伪激光雷达数据,辅助3D检测模型训练!
Pseudo-LiDAR
康奈尔大学提出的Pseudo-LiDAR,探讨了为什么Image-based 3D Perception与LiDAR-based 3D Perception之间存在较大的gap,并且提出了bridge this gap的解决方案。论文首先利用DRON或PSMNET从单目 (Monocular)或双目 (Stereo)图像获取对应的深度图像(depth map),然后将原图像结合深度信息得到伪雷达点云 (pseudo-LiDAR),最后用pseudo-LiDAR代替原始雷达点云,以3D point cloud和bird's eye view的形式,分别在LiDAR-based的F-PointNet以及AVOD上与图像的front view表示进行了比较,并对比了Image-based的Mono3D, 3DOP, MLF这三类方案。论文验证了将图像转换为pseudo-LiDAR表示后,确实是bridged the gap between Image-based 3D Perception and LiDAR-based 3D Perception!!!论文指出目前的Image-based 3D Perception方案较差的性能主要是由于front view这种2D图形表示,而不是之前一直纠结的不准确的depth map。使用相同方法估计的depth map, 以BEV形式 (pseudo-Lidar投影得到)的3D Perception要远优于FV+depth map的形式。

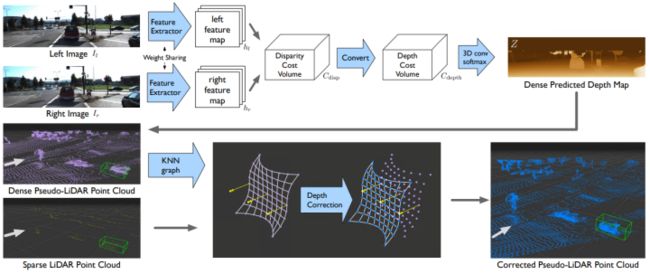
Pseudo-LiDAR++
Pseudo-LiDAR++通过改进立体深度估计,为伪激光雷达框架提供了实质性进展。论文调整了立体网络结构和损耗函数,使其与远距离目标的精确深度估计更加一致,这是目前伪激光雷达的主要弱点。此外还探索了利用更便宜但极为稀疏的激光雷达传感器来消除深度估计偏差的想法,这些传感器单独为3D检测提供的信息不足。最后提出了一种深度传播算法,在初始深度估计的指导下,在整个深度图上扩散这几个精确的测量值。相比于Pseudo-LiDAR,效果提升了27%。在某些指标上,可以和64线的激光雷达媲美(4线的激光雷达比64线的激光雷达价格要低两个数量级,这一套设备比之前64线的解决方案,成本降低95%)。
E2E Pseudo-LiDAR
E2E Pseudo-LiDAR是发表在CVPR2020的单目目标检测模型,主要创新点:端到端!!!伪激光雷达(PL)的引入导致基于激光雷达传感器的方法与基于廉价立体相机的方法之间的精度差距大幅缩小,PL通过将2D深度图输出转换为3D点云输入,将用于3D深度估计的深度神经网络与用于3D目标检测的深度网络相结合。然而,到目前为止,这两个网络必须分别进行训练。E2E Pseudo-LiDAR介绍了一种基于可微表示变化(CoR)模块的新框架,该框架允许对整个PL管道进行端到端的训练。生成的框架与这两项任务的SOTA网络兼容,并与PointRCNN结合,在所有基准上均优于PL,KITTI 3D目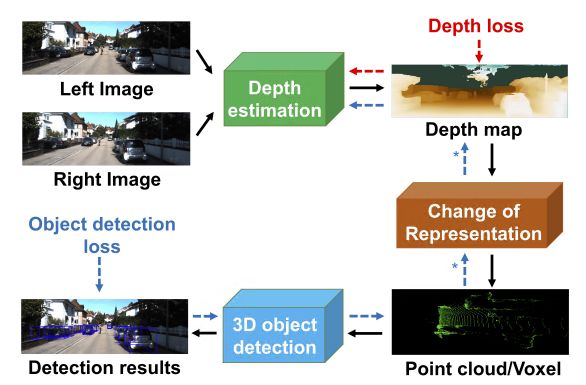
基于双目数据的3D检测
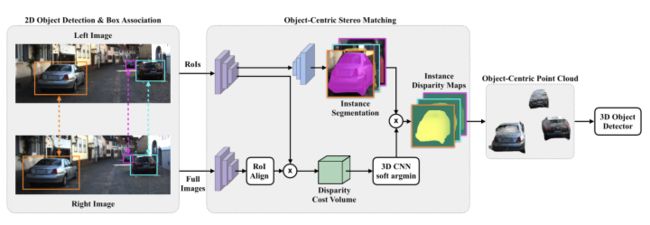
Object-Centric Stereo Matching for 3D Object Detection
其实上述的E2E Pseudo-LiDAR、Pseudo-LiDAR++也基本算基于双目数据的检测网络,双目3D检测一般是生成视差图或者深度图然后进一步送到3D检测器中,也有直接利用左右图像几何约束直接完成3D预测,现在再聊一下其它基于Stereo的强相关任务!Object-Centric Stereo Matching for 3D Object Detection是ICRA2020的一篇paper,论文提出当前用于立体3D目标检测的方法,无需修改就可以用PSMNet立体匹配网络,估计的视差转换为3D点云,然后馈入基于激光雷达的3D目标检测器。现有立体匹配网络的问题在于,它们是为视差估计而不是3D目标检测而设计的,目标点云的形状和准确性不是重点。由于背景和前景的点云是联合估计的,立体匹配网络通常会在目标边界处的深度估计不准确,该估计被称为条纹(streaking),而且现有网络在其损失函数中还计算视差而不是估计的目标点云位置的惩罚。在这里论文提出了一种二维边框关联(association)和以目标为中心的立体匹配方法,仅估计感兴趣目标的视差。下图所示是整个算法的流程图:首先,一个2D检测器在立体图像Il和Ir中生成2D边框。接下来,边框关联算法会在两个图像之间的目标检测进行匹配,比如结构相似索引测度。每个匹配的检测对都传递到以目标为中心的立体网络中,该网络将为每个目标生成视差图和实例分割掩码(基准的视差估计算法是PSMNet)。它们一起形成仅包含感兴趣目标的视差图。最后,视差图转换为点云,任何基于激光雷达的3D对目标检测网络都可以用该点云来预测3D边框。
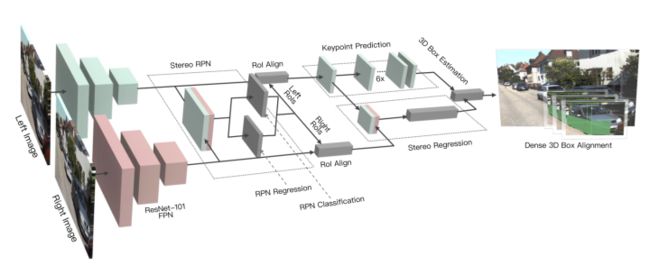
Stereo R-CNN
Stereo R-CNN充分用立体图像的稀疏和密集、语义和几何信息来实现自动驾驶的3D目标检测方法。Stereo R-CNN的方法扩展Faster R-CNN到立体视觉输入,同时检测和关联左右图像的目标。在立体视觉区域提议网络(RPN)之后,该方法添加额外的分支预测稀疏的关键点、视点和目标尺寸,将其与2D左右框组合计算出粗略的3D目标边框。然后,左右RoI通过基于区域的光度对齐来恢复准确的3D边框。该方法不需要输入深度和3D位置来监督学习,但好过所有现有的完全基于图像的监督学习方法。
IDA-3D
IDA-3D提出了一种基于立体视觉的三维目标检测方法,该方法不依赖于激光雷达数据作为输入,也不依赖于作为训练的监督,而只以带有相应标注的三维边界框的RGB图像作为训练数据。由于目标的深度估计是影响三维目标检测性能的关键因素,本文介绍了一个实例深度提取(IDA)模块,该模块通过实例深度感知、视差自适应和匹配代价重加权,准确地预测出三维包围盒中心的深度。此外,模型是一个端到端的学习框架,不需要多阶段或后处理算法。
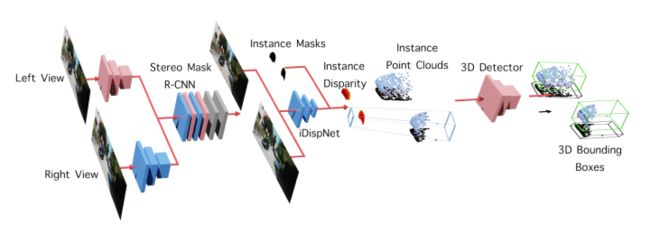
Disp R-CNN
Disp R-CNN提出在整个图像上计算视差图比较昂贵,并且不能利用特定类别的先验。相反,论文设计了一个实例视差估计网络 iDispNet,它仅仅为感兴趣的目标区域里的像素预测视差,并且学习类别特定的形状先验,以便更准确的估计视差。为了解决训练中视差标注不足的问题,提出在不需要雷达点云的情况下,使用统计形状模型生成密集视差伪真值,这使得我们的系统具有更广泛的适用性。实验表明,在物体形状先验的指导下,估计的实例视差捕获了物体边界的平滑形状和锋利边缘,而且比完整帧的对应值更准确。通过实例级视差估计的设计,在视差估计过程中减少了输入和输出像素的数量,减少了代价量搜索的范围,从而减少了整体三维检测框架的运行时间。
DSGN
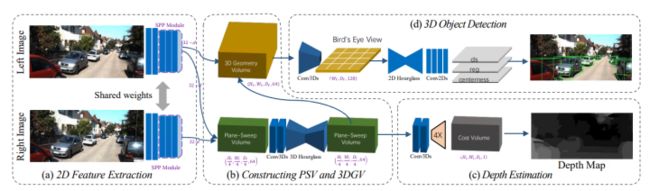
深度立体几何网络(DSGN),通过在一种可微分的体积表示(3D几何体)上检测3D目标来显著缩小这一差距,该方法有效地编码了3D规则空间的3D几何结构。通过这种表示,可以同时学习深度信息和语义线索。论文首次提供了一种简单有效的基于立体的单级三维检测pipeline,以端到端学习的方式联合估计深度和检测三维物体。论文主要思路如下:
为了弥补2D图像和3D空间之间的鸿沟,在平面扫描体中建立立体对应,然后将其转换为3D几何体,以便能够同时编码3D几何和语义线索,以便在3D规则空间中进行预测;
设计了一个端到端的pipeline,用于提取像素级特征用于立体匹配,高层特征用于目标检测。该网络联合估计场景深度和检测3D世界中的3D对象,使许多实际应用成为可能;
简单且完全可区分的网络性能优于官方Kitti排行榜上的所有其他立体式3D目标检测器(AP高出10%);
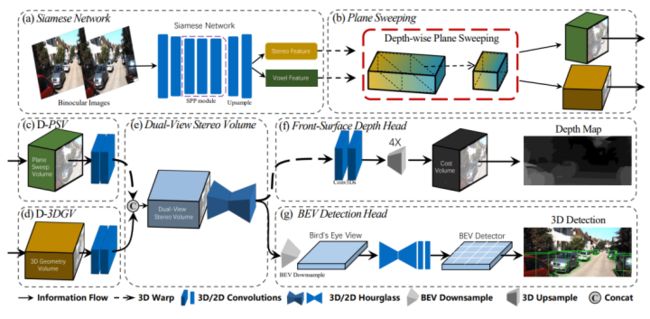
DSGN++
DSGN++完善了立体建模,并提出了高级版本DSGN++,旨在从三个主要方面增强整个2D到3D pipelines的有效信息流。首先,为了有效地将2D信息提升到立体体积,提出了深度方向平面扫描(DPS),允许更密集的连接并提取深度引导特征。第二,为了抓住不同间隔的特征,我们提出了一种新的立体volume——双视立体volume(DSV),它集成了前视图和俯视特征,并在摄像机截头体中重建子体素深度。第三,由于前景区域在3D空间中的主导地位降低,论文提出了一种多模式数据编辑策略:立体激光雷达复制粘贴,这确保了跨模式对齐并提高了数据效率。在KITTI基准上的各种模态设置中的广泛实验表明,DSGN++方法在所有类别中都始终优于其他基于camera的3D检测器。
往期回顾:
史上最全综述 | 3D目标检测算法汇总!(单目/双目/LiDAR/多模态/时序/半弱自监督)
2022最新综述!一文详解自动驾驶中的多模态融合感知算法(数据级/特征级/目标级)
【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D感知、多传感器融合、SLAM、高精地图、规划控制、AI模型部署落地等方向;
加入我们:自动驾驶之心技术交流群汇总!
自动驾驶之心【知识星球】
想要了解更多自动驾驶感知(分类、检测、分割、关键点、车道线、3D感知、多传感器融合、目标跟踪)、自动驾驶定位建图(SLAM、高精地图)、自动驾驶规划控制、领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球(三天内无条件退款),日常分享论文+代码,这里汇聚行业和学术界大佬,前沿技术方向尽在掌握中,期待交流!