激光IMU融合——LIO-Mapping / LIOM / LINS / LIO-SAM算法解析
激光IMU融合——LIO-Mapping / LIOM / LINS / LIO-SAM算法解析
- 激光IMU融合——LIO-Mapping / LIOM / LINS / LIO-SAM算法解析
-
- 1. LIO-Mapping
-
- 1.1 总体框架
- 1.2 滑窗管理
- 1.3 地图注册
- 1.4 实验结果
- 2. LIOM
-
- 2.1 总体框架
- 2.2 误差状态扩展卡尔曼滤波
- 2.2 实验结果
- 3 . LINS
-
- 3.1 总体框架
- 3.2 误差状态扩展卡尔曼滤波
- 3.3 实验结果
- 4. LIO-SAM
-
- 4.1 总体框架
- 4.2 因子图构建
- 4.3 实验结果
激光IMU融合——LIO-Mapping / LIOM / LINS / LIO-SAM算法解析
在激光SLAM领域,LOAM、Lego-LOAM属于纯激光领域,除此之外还衍生处理视觉激光结合、激光IMU结合,甚至三者结合的算法,视觉激光结合的算法在我之前写的博文视觉激光融合——VLOAM / LIMO算法解析中有简单总结,本文所介绍的LIO-Mapping / LIOM / LINS / LIO-SAM算法就隶属于激光IMU结合的算法,在发展成熟度上面是要优于视觉激光融合的。
因为我是先学习的视觉SLAM算法,从整体框架上理解,LIOM、LINS类似于MSCKF,后端是基于滤波的方法实现两种传感器的紧耦合,而LIO-Mapping类似于VINS-Mono,后端是基于优化的方法实现两种传感器的紧耦合,LIO-SAM后端是基于因子图实现的多种传感器的紧耦合,对MSCKF和VINS-Mono不了解的同学可以如下参考博客:
VINS-Mono关键知识点总结——前端详解
VINS-Mono关键知识点总结——边缘化marginalization理论和代码详解
VINS-Mono关键知识点总结——预积分和后端优化IMU部分
学习MSCKF笔记——前端、图像金字塔光流、Two Point Ransac
学习MSCKF笔记——四元数基础
学习MSCKF笔记——真实状态、标称状态、误差状态
学习MSCKF笔记——后端、状态预测、状态扩增、状态更新
本篇博客,我对以上算法进行简单总结。
1. LIO-Mapping
LIO-Mapping是2019年发表于ICRA一篇论文,原论文为《Tightly Coupled 3D Lidar Inertial Odometry and Mapping》,从工程层面上将,就是LOAM和VINS-Mono的结合,具体介绍如下:
1.1 总体框架
LIO-Mapping总体框架如下:

具体步骤如下:
- 在激光雷达数据 S j S_{j} Sj到来之前,IMU原始输入 I i , j \mathcal{I}_{i, j} Ii,j进行积分(State prediction)和预积分(Pre-intergration),积分的目的是为了获得我们需要估计的状态变量 p B i W \mathbf{p}_{B_{i}}^{W} pBiW, v B i W \mathbf{v}_{B_{i}}^{W} vBiW和 q B i W \mathbf{q}_{B_{i}}^{W} qBiW,而预积分的目的是为了获得用于联合优化的 Δ p i j \Delta \mathbf{p}_{i j} Δpij, Δ v i j \Delta \mathbf{v}_{i j} Δvij和 Δ q i j \Delta \mathbf{q}_{i j} Δqij;
- 当系统收到借光雷达数据 S j S_{j} Sj后,对激光雷达进行去畸变操作(De-skewing)获得去畸变点云 S j S_{j} Sj,然后在此基础上对去畸变点云提取激光雷达特征点 F L j \mathbf{F}_{L_{j}} FLj(Feature extraction);
- 在滑动窗口内的激光雷达特征 F L o , i \mathbf{F}_{L_{o, i}} FLo,i根据优化后的位姿 T B o , i W \mathbf{T}_{B_{o, i}}^{W} TBo,iW和 T B L \mathbf{T}_{B}^{L} TBL组成局部地图 M L o , i L p \mathbf{M}_{L_{o, i}}^{L_{p}} MLo,iLp(Local map management),根据预测的位姿实现当前帧激光特征点和局部地图的匹配(FInd relative lidar measurements);
- 最后就是j激光雷达观测 m L p + 1 , j \mathbf{m}_{L_{p+1, j}} mLp+1,j以及预积分结果 Δ p i j \Delta \mathbf{p}_{i j} Δpij, Δ v i j \Delta \mathbf{v}_{i j} Δvij和 Δ q i j \Delta \mathbf{q}_{i j} Δqij实现联合优化,优化后的结果用于跟新IMU积分获得的状态变量,避免IMU漂移;
由于激光雷达去畸变及特征提取、预积分、边缘化等操作在VINS-Mono的相关博客中都有详细介绍,因此本篇博客只对LIO-Mapping中较为特殊的滑窗管理和地图注册进行总结
1.2 滑窗管理
LIO-Mapping中滑窗管理示意图如下:

其中,
o o o是滑窗中的第一帧Lidar Sweep,
i i i是滑窗中最后一帧Lidar Sweep,
j j j是当前帧的Lidar Sweep,
p p p是滑窗中的Pivot Lidar Sweep,所谓Pivot Lidar Sweep指的就是整个滑窗内帧的位姿都是基于该帧坐标系建立的,随着滑窗移动,Pivot Lidar Sweep也不断变化。
我们将滑窗内的特征点构建为局部地图 M L o , i L p = F L γ L p , γ ∈ { o , … , i } \mathbf{M}_{L_{o}, i}^{L_{p}} = \mathbf{F}_{L_{\gamma}}^{L_{p}}, \gamma \in\{o, \ldots, i\} MLo,iLp=FLγLp,γ∈{o,…,i},然后我们通过KNN算法找到原始特征点 F L α , α ∈ { p + 1 , … , j } \mathbf{F}_{L_{\alpha}}, \alpha \in\{p+1, \ldots, j\} FLα,α∈{p+1,…,j}与局部地图的对应关系并构建点到面的残差,优化过程中会优化窗口中所有帧相对Pivot Lidar Sweep的相对位姿以 T L p W \mathbf{T}_{L_{p}}^{W} TLpW及包括Pivot Lidar Sweep的位姿 T L p W \mathbf{T}_{L_{p}}^{W} TLpW,而其中相对位姿可以表示为: T L α L p = T B L T B p W − 1 T B α W T B L − 1 = [ R L α L p p L α L p 0 1 ] \mathbf{T}_{L_{\alpha}}^{L_{p}}=\mathbf{T}_{B}^{L} \mathbf{T}_{B_{p}}^{W}{ }^{-1} \mathbf{T}_{B_{\alpha}}^{W} \mathbf{T}_{B}^{L-1}=\left[\begin{array}{cc} \mathbf{R}_{L_{\alpha}}^{L_{p}} & \mathbf{p}_{L_{\alpha}}^{L_{p}} \\ \mathbf{0} & 1 \end{array}\right] TLαLp=TBLTBpW−1TBαWTBL−1=[RLαLp0pLαLp1]那么激光雷达的点到面的残差可以表示为: r L ( m , T L p W , T L α W , T B L ) = ω T ( R L α L p x + p L α L p ) + d \mathbf{r}_{\mathcal{L}}\left(m, \mathbf{T}_{L_{p}}^{W}, \mathbf{T}_{L_{\alpha}}^{W}, \mathbf{T}_{B}^{L}\right)=\boldsymbol{\omega}^{T}\left(\mathbf{R}_{L_{\alpha}}^{L_{p}} x+\mathbf{p}_{L_{\alpha}}^{L_{p}}\right)+d rL(m,TLpW,TLαW,TBL)=ωT(RLαLpx+pLαLp)+d结合边缘化残差和预积分残差,整个优化的代码函数为 min X 1 2 { ∥ r P ( X ) ∥ 2 + ∑ m ∈ m L α α ∈ { p + 1 , ⋯ , j } ∥ r L ( m , X ) ∥ C L α m 2 + ∑ β ∈ { p , ⋯ , j − 1 } ∥ r B ( z β + 1 β , X ) ∥ C B β + 1 B β 2 } \begin{array}{c} \min _{\mathbf{X}} \frac{1}{2}\left\{\left\|\mathbf{r}_{\mathcal{P}}(\mathbf{X})\right\|^{2}+\sum_{m \in \mathbf{m}_{L_{\alpha}} \atop \alpha \in\{p+1, \cdots, j\}}\left\|\mathbf{r}_{\mathcal{L}}(m, \mathbf{X})\right\|_{\mathbf{C}_{L_{\alpha}}^{m}}^{2}\right. \\ \left.+\sum_{\beta \in\{p, \cdots, j-1\}}\left\|\mathbf{r}_{\mathcal{B}}\left(z_{\beta+1}^{\beta}, \mathbf{X}\right)\right\|_{\mathbf{C}_{B_{\beta+1}}^{B_{\beta}}}^{2}\right\} \end{array} minX21{∥rP(X)∥2+∑α∈{p+1,⋯,j}m∈mLα∥rL(m,X)∥CLαm2+∑β∈{p,⋯,j−1}∥∥∥rB(zβ+1β,X)∥∥∥CBβ+1Bβ2}其中 r P ( X ) \mathbf{r}_{\mathcal{P}}(\mathbf{X}) rP(X)是边缘化残差, r L ( m , X ) \mathbf{r}_{\mathcal{L}}(m, \mathbf{X}) rL(m,X)为激光雷达残差, r B ( z β + 1 β , X ) \mathbf{r}_{\mathcal{B}}\left(z_{\beta+1}^{\beta}, \mathbf{X}\right) rB(zβ+1β,X)为预积分残差,优化变量为 X = [ X B p W , … , X B j W , T B L ] \mathbf{X}=\left[\mathbf{X}_{B_{p}}^{W}, \ldots, \mathbf{X}_{B_{j}}^{W}, \mathbf{T}_{B}^{L}\right] X=[XBpW,…,XBjW,TBL]其中 X B i W = [ p B i W T v B i W T q B i W T b a i T b g i T ] T \mathbf{X}_{B_{i}}^{W}=[\mathbf{p}_{B_{i}}^{W^{T}} \quad \mathbf{v}_{B_{i}}^{W^{T}} \quad \mathbf{q}_{B_{i}}^{W^{T}}\quad\mathbf{b}_{a_{i}}^{T} \quad \mathbf{b}_{g_{i}}{ }^{T}]^{T} XBiW=[pBiWTvBiWTqBiWTbaiTbgiT]T T B L = [ p B L T q B L T ] T \mathbf{T}_{B}^{L}=\left[\begin{array}{ll} \mathbf{p}_{B}^{L^{T}} & \mathbf{q}_{B}^{L^{T}} \end{array}\right]^{T} TBL=[pBLTqBLT]T
1.3 地图注册
在优化获得位姿后,论文还有一步Refinement with Rotational Constraints的过程,就是将当前帧的激光雷达点注册到全局地图中去,这也是为什么叫LIO-mapping的原因,大致流程如下: C M = ∑ m ∈ m L ∥ r M ( m , T L W ) ∥ 2 , r M ( m , T ) = ω T ( R x + p ) + d \mathbf{C}_{\mathcal{M}}=\sum_{m \in \mathbf{m}_{L}}\left\|\mathbf{r}_{\mathcal{M}}\left(m, \mathbf{T}_{L}^{W}\right)\right\|^{2},\mathbf{r}_{\mathcal{M}}(m, \mathbf{T})=\boldsymbol{\omega}^{T}(\mathbf{R} \mathbf{x}+\mathbf{p})+d CM=m∈mL∑∥∥rM(m,TLW)∥∥2,rM(m,T)=ωT(Rx+p)+d其中, T L W \mathbf{T}_{L}^{W} TLW为前一步估计出来的位姿, J p C \mathbf{J}_{\mathrm{p}}^{\mathrm{C}} JpC和 J p C \mathbf{J}_{\mathrm{p}}^{\mathrm{C}} JpC为残差相对位置和姿态的雅克比,为了保证地图和重力是对齐的,因此采用 S E ( 2 ) − C o n s t r a i n t SE(2)-Constraint SE(2)−Constraint优化,由于Yaw方向姿态有更高的不确定性,而Roll和Pitch相对更加准确,因此对姿态的雅克比进行了限制 J θ z C = J θ C ⋅ ( R ˘ ) T ⋅ Ω ˘ z \mathbf{J}_{\boldsymbol{\theta}_{z}}^{\mathbf{C}}=\mathbf{J}_{\boldsymbol{\theta}}^{\mathbf{C}} \cdot(\breve{\mathbf{R}})^{T} \cdot \breve{\boldsymbol{\Omega}}_{z} JθzC=JθC⋅(R˘)T⋅Ω˘z c Ω ˘ z = [ ϵ x 0 0 0 ϵ y 0 0 0 1 ] c \breve{\Omega}_{z}=\left[\begin{array}{ccc} \epsilon_{x} & 0 & 0 \\ 0 & \epsilon_{y} & 0 \\ 0 & 0 & 1 \end{array}\right] cΩ˘z=⎣⎡ϵx000ϵy0001⎦⎤其中, ( R ˘ ) (\breve{\mathbf{R}}) (R˘)为上一次迭代的状态, Ω ˘ z \breve{\Omega}_{z} Ω˘z是姿态相对与世界坐标系的信息矩阵的近似值, ϵ x , ϵ y \epsilon_{x}, \epsilon_{y} ϵx,ϵy通过Information Ratio获得。在优化步骤中通过 ϵ x , ϵ y \epsilon_{x}, \epsilon_{y} ϵx,ϵy计算增量 δ θ z \delta \theta_{z} δθz和 δ p \delta \boldsymbol{p} δp,然后再进行状态更新 p ~ = p ˘ + δ p \tilde{\mathbf{p}}=\breve{\mathbf{p}}+\delta \mathbf{p} p~=p˘+δp q ~ = [ 1 2 δ θ z 1 ] ⊗ q ˘ \tilde{\mathbf{q}}=\left[\begin{array}{c} \frac{1}{2} \delta \boldsymbol{\theta}_{z} \\ 1 \end{array}\right] \otimes \breve{\mathbf{q}} q~=[21δθz1]⊗q˘
1.4 实验结果

上表是消融实验的结果,LIO-raw指的是不对激光雷达进行运动补偿的结果,LIO-no-ex值得是没有进行在线外参估计的方法,LIO是带有滑窗优化的方法,LIO-mapping是带有Rotation Constraints的方法,从结果看,LIO-mapping效果确实更好。该算法效果有所提升,但是由于计算量较大没法到达实时运行。
2. LIOM
LIOM是2019年发表于IROS的一篇文章,该文章原标题为《A Robust Laser-Inertial Odometry and Mapping Method for Large-Scale Highway Environments》,标题中的For Highway Environments主要体现在利用IMU对输入进行去畸变操作,以及使用NN对点云进行语义分割,去除运动物体的影响,具体如下:
2.1 总体框架
LIOM算法总体框架如下:

如上图所示,算法由四个模块组成,其中Scan Pre-process负责进行激光点云去畸变操作;Dynamic Object Detection负责通过语义分割进行动态物体检测;Laser-Inertial Odometry就是其中最核心的部分,实现激光IMU紧耦合;Laser Mapping负责利用Odometry的输出建立全局地图,然后使用当前帧激光点云和全局地图进行NDT来实现定位结果的Refinement。这里,我们简单回顾下基于误差状态扩展卡尔曼滤波的紧耦合操作。
2.2 误差状态扩展卡尔曼滤波
原论文中这一部分的推导其实让我有点懵,我结合我自己的理解,对论文中的公式进行了一些修改,如果有问题欢迎大家指出。首先,在误差状态扩展卡尔曼滤波中要区分真实状态 x x x,标称状态 x ^ \hat{x} x^和误差状态 δ x \boldsymbol{\delta} x δx的区别,他们的关系如下: x = x ^ ⊕ δ x x=\hat{x} \oplus \boldsymbol{\delta} x x=x^⊕δxLIOM中没有对外参进行在线估计(MSCKF中有),因此误差状态变量相对简单,如下: δ x = [ δ v δ p δ θ δ a b δ w b ] \delta x=\left[\begin{array}{c} \delta {v} \\ \delta {p} \\ \delta {\theta} \\ \delta {a}_{b} \\ \delta {w}_{b} \end{array}\right] δx=⎣⎢⎢⎢⎢⎡δvδpδθδabδwb⎦⎥⎥⎥⎥⎤误差状态变量的运动学方程如下: δ x ˙ = [ δ v ˙ δ p ˙ δ θ ˙ δ a ˙ b δ w ˙ b ] = [ − R ^ [ a m − a ^ b ] × δ θ − R ^ δ a b − R ^ a n δ v − [ w m − w ^ b ] × δ θ − δ w b − w n a w w w ] \delta \dot{x}=\left[\begin{array}{c} \delta \dot{v} \\ \delta \dot{p} \\ \delta \dot{\theta} \\ \delta \dot{a}_{b} \\ \delta \dot{w}_{b} \end{array}\right]=\left[\begin{array}{c} -\hat{R}\left[a_{m}-\hat{a}_{b}\right]_{\times} \delta \theta-\hat{R} \delta a_{b}-\hat{R} a_{n} \\ \delta v \\ -\left[w_{m}-\hat{w}_{b}\right]_{\times} \delta \theta-\delta w_{b}-w_{n} \\ a_{w} \\ w_{w} \end{array}\right] δx˙=⎣⎢⎢⎢⎢⎡δv˙δp˙δθ˙δa˙bδw˙b⎦⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎡−R^[am−a^b]×δθ−R^δab−R^anδv−[wm−w^b]×δθ−δwb−wnawww⎦⎥⎥⎥⎥⎤根据运动学方程就可以获得方差传递方程: Σ ˉ t + 1 = F x Σ t F x T + F n Q n F n T \bar{\Sigma}_{t+1}=F_{x} \Sigma_{t} F_{x}^{T}+F_{n} Q_{n} F_{n}^{T} Σˉt+1=FxΣtFxT+FnQnFnT
而对于标称状态变量直接根据欧拉积分就可以推导获得 [ v ^ t + 1 p ^ t + 1 R ^ t + 1 a ^ b ( t + 1 ) w ^ b ( t + 1 ) ] = [ v ^ t + [ R ^ t ( a m − a ^ b ( t ) ) + g ] Δ t p ^ t + v ^ t Δ t + 1 2 [ R ^ t ( a m − a ^ b ( t ) ) + g ] Δ t 2 R ^ t R { ( w m − w ^ b ( t ) ) Δ t } a ^ b ( t ) w ^ b ( t ) ] \left[\begin{array}{c} \hat{v}_{t+1} \\ \hat{p}_{t+1} \\ \hat{R}_{t+1} \\ \hat{a}_{b(t+1)} \\ \hat{w}_{b(t+1)} \end{array}\right]=\left[\begin{array}{c} \hat{v}_{t}+\left[\hat{R}_{t}\left(a_{m}-\hat{a}_{b(t)}\right)+g\right] \Delta t \\ \hat{p}_{t}+\hat{v}_{t} \Delta t+\frac{1}{2}\left[\hat{R}_{t}\left(a_{m}-\hat{a}_{b(t)}\right)+g\right] \Delta t^{2} \\ \hat{R}_{t} R\left\{\left(w_{m}-\hat{w}_{b(t)}\right) \Delta t\right\} \\ \hat{a}_{b(t)} \\ \hat{w}_{b(t)} \end{array}\right] ⎣⎢⎢⎢⎢⎡v^t+1p^t+1R^t+1a^b(t+1)w^b(t+1)⎦⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎢⎢⎡v^t+[R^t(am−a^b(t))+g]Δtp^t+v^tΔt+21[R^t(am−a^b(t))+g]Δt2R^tR{(wm−w^b(t))Δt}a^b(t)w^b(t)⎦⎥⎥⎥⎥⎥⎥⎤以上基本上就是扩展卡尔曼滤波的预测过程,以下则是更新过程:
观测模型如下: δ y = H δ x = [ 0 I 3 0 0 0 0 0 I 3 0 0 ] δ x \delta y=H \delta x=\left[\begin{array}{ccccc} 0 & I_{3} & 0 & 0 & 0 \\ 0 & 0 & I_{3} & 0 & 0 \end{array}\right] \delta x δy=Hδx=[00I300I30000]δx通过预测过程,我们可以获得一个先验的状态变量及方差 δ x ˉ t + 1 m ∈ R 6 , Σ ˉ t + 1 m ∈ R 6 × 6 \delta \bar{x}_{t+1}^{m} \in \mathbb{R}^{6}, \bar{\Sigma}_{t+1}^{m} \in \mathbb{R}^{6 \times 6} δxˉt+1m∈R6,Σˉt+1m∈R6×6,根据先验的状态变量及方差,基于NDT算法,我们可以获得后验状态变量及方差 δ x t + 1 m ∈ R 6 \delta x_{t+1}^{m} \in \mathbb{R}^{6} δxt+1m∈R6 , Σ t + 1 m ∈ R 6 × 6 \Sigma_{t+1}^{m} \in \mathbb{R}^{6 \times 6} Σt+1m∈R6×6,根据先验和后验的误差,我们就可以计算出观测以及观测误差的大小: C t + 1 m = ( Σ t + 1 m − ( Σ ˉ t + 1 m ) − 1 ) − 1 C_{t+1}^{m}=\left(\Sigma_{t+1}^{m}-\left(\bar{\Sigma}_{t+1}^{m}\right)^{-1}\right)^{-1} Ct+1m=(Σt+1m−(Σˉt+1m)−1)−1 δ y t + 1 m = ( K m ) − 1 ( δ x t + 1 m − δ x ˉ t + 1 m ) + δ x ˉ t + 1 m \delta y_{t+1}^{m}=\left(K^{m}\right)^{-1}\left(\delta x_{t+1}^{m}-\delta \bar{x}_{t+1}^{m}\right)+\delta \bar{x}_{t+1}^{m} δyt+1m=(Km)−1(δxt+1m−δxˉt+1m)+δxˉt+1m其中, K m = Σ ˉ t + 1 H m T ( H m Σ ˉ t + 1 H m T + C t + 1 m ) − 1 ∈ R 6 × 6 K^{m}=\bar{\Sigma}_{t+1} H^{m T}\left(H^{m} \bar{\Sigma}_{t+1} H^{m T}+C_{t+1}^{m}\right)^{-1} \in \mathbb{R}^{6 \times 6} Km=Σˉt+1HmT(HmΣˉt+1HmT+Ct+1m)−1∈R6×6这一步成为inversing the kalman filter measurement update,有了观测之后,我们就可以进行正常的卡尔曼更新了,如下: K = Σ ˉ t + 1 H T ( H Σ ˉ t + 1 H T + C t + 1 ) K=\bar{\Sigma}_{t+1} H^{T}\left(H \bar{\Sigma}_{t+1} H^{T}+C_{t+1}\right) K=Σˉt+1HT(HΣˉt+1HT+Ct+1) δ x t + 1 = K ( δ y t + 1 − H δ x ˉ t + 1 ) \delta x_{t+1}=K\left(\delta y_{t+1}-H \delta \bar{x}_{t+1}\right) δxt+1=K(δyt+1−Hδxˉt+1) Σ t + 1 = ( I 15 − K H ) Σ ˉ t + 1 \Sigma_{t+1}=\left(I_{15}-K H\right) \bar{\Sigma}_{t+1} Σt+1=(I15−KH)Σˉt+1最后进行误差矫正即可,如下: [ v ^ t + 1 p ^ t + 1 R ^ t + 1 a ^ b ( t + 1 ) w ^ b ( t + 1 ) ] = [ v ^ t + δ v t + 1 p ^ t + δ p t + 1 R ^ t ⋅ R ( δ θ t + 1 ) a ^ b t + δ a b ( t + 1 ) w ^ b t + δ w b ( t + 1 ) ] \left[\begin{array}{c} \hat{v}_{t+1} \\ \hat{p}_{t+1} \\ \hat{R}_{t+1} \\ \hat{a}_{b(t+1)} \\ \hat{w}_{b(t+1)} \end{array}\right]=\left[\begin{array}{c} \hat{v}_{t}+\delta v_{t+1} \\ \hat{p}_{t}+\delta p_{t+1} \\ \hat{R}_{t} \cdot R\left(\delta \theta_{t+1}\right) \\ \hat{a}_{b t}+\delta a_{b(t+1)} \\ \hat{w}_{b t}+\delta w_{b(t+1)} \end{array}\right] ⎣⎢⎢⎢⎢⎡v^t+1p^t+1R^t+1a^b(t+1)w^b(t+1)⎦⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎡v^t+δvt+1p^t+δpt+1R^t⋅R(δθt+1)a^bt+δab(t+1)w^bt+δwb(t+1)⎦⎥⎥⎥⎥⎤
以上就可以输出100HZ的激光IMU融合结果
2.2 实验结果
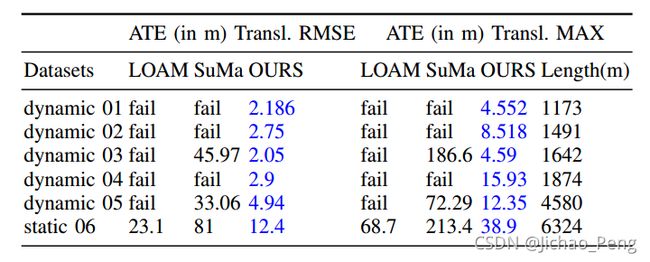
在论文中,作者在高速公路数据集上对比了LIOM,LOAM和SuMa三种算法的结果,如下所示:
在高速公路数据集上,LIOM确实有突出表现,建图效果对比如下所示:

3 . LINS
LINS是2020年发表于ICRA上的一篇文章,原论文名称为《LINS: A Lidar-Inertial State Estimator for Robust and Efficient
Navigation》,该论文的主要特点在于使用了基于误差状态的迭代扩展卡尔曼滤波,并且以机器人中心重新定义了状态变量,论文还和LIO-Mapping进行了对比,在精度相同的情况下取得了更高的效率。
3.1 总体框架
算法总体框架如下:

算法整体框架也是非常清晰明了,Feature Extraction Module主要用于提取激光雷达特征点,Lidar-inertial Odometry Module就是通过卡尔曼滤波融合激光雷达特征点和IMU,Mapping Module主要利用全局地图来Refine里程计的结果。由于Feature Extraction Module主要参考的LOAM和Lego-LOAM算法,这里我们主要总结其中核心的卡尔曼滤波融合部分。
3.2 误差状态扩展卡尔曼滤波
LINS中的误差状态扩展卡尔曼滤波的特点主要是:
- 以机器人中心定义的状态变量,避免了在线性化过程中不断增大的不确定性;
- 使用迭代扩展卡尔曼滤波,以取得更高的精度;
下面具体展开,在LIOM算法中,所有状态变量都是建立在世界坐标系下,并对其进行拓展卡尔曼滤波,这样由于线性化导致的误差是在不断累积的,但是在LINS,状态变量定义如下: x w b k : = [ p w b k , q w b k ] \mathbf{x}_{w}^{b_{k}}:=\left[\mathbf{p}_{w}^{b_{k}}, \mathbf{q}_{w}^{b_{k}}\right] xwbk:=[pwbk,qwbk] x b k + 1 b k : = [ p b k + 1 b k , v b k + 1 b k , q b k + 1 b k , b a , b g , g b k ] \mathbf{x}_{b_{k+1}}^{b_{k}}:=\left[\mathbf{p}_{b_{k+1}}^{b_{k}}, \mathbf{v}_{b_{k+1}}^{b_{k}}, \mathbf{q}_{b_{k+1}}^{b_{k}}, \mathbf{b}_{a}, \mathbf{b}_{g}, \mathbf{g}^{b_{k}}\right] xbk+1bk:=[pbk+1bk,vbk+1bk,qbk+1bk,ba,bg,gbk]所谓“以机器人中心定义状态变量”指的就是参与迭代扩展卡尔曼滤波是 x b k + 1 b k \mathbf{x}_{b_{k+1}}^{b_{k}} xbk+1bk,而 x w b k \mathbf{x}_{w}^{b_{k}} xwbk是根据 x b k + 1 b k \mathbf{x}_{b_{k+1}}^{b_{k}} xbk+1bk的滤波结果进行更新,本身不参与滤波,而 x b k + 1 b k \mathbf{x}_{b_{k+1}}^{b_{k}} xbk+1bk指的是在 k + 1 k+1 k+1帧坐标系下第 k k k帧的位姿,因此可以避免线性化过程误差的累计。
x b k + 1 b k \mathbf{x}_{b_{k+1}}^{b_{k}} xbk+1bk的误差状态变量定义如下 δ x : = [ δ p , δ v , δ θ , δ b a , δ b g , δ g ] \boldsymbol{\delta} \mathbf{x}:=\left[\boldsymbol{\delta} \mathbf{p}, \delta \mathbf{v}, \delta \theta, \delta \mathbf{b}_{a}, \delta \mathbf{b}_{g}, \delta \mathbf{g}\right] δx:=[δp,δv,δθ,δba,δbg,δg]误差状态 δ x \delta \mathbf{x} δx、标称状态 − x b k + 1 b k { }^{-} \mathbf{x}_{b_{k+1}}^{b_{k}} −xbk+1bk与真实状态 x b k + 1 b k \mathbf{x}_{b_{k+1}}^{b_{k}} xbk+1bk关系如下 x b k + 1 b k = − x b k + 1 b k 田 δ x = [ − p b k + 1 b k + δ p − v b k + 1 b k + δ v − q b k + 1 b k ⊗ exp ( δ θ ) a − b + δ b a − b g + δ b g − g b k + δ g ] \mathbf{x}_{b_{k+1}}^{b_{k}}=-\mathbf{x}_{b_{k+1}}^{b_{k}} \text { 田 } \boldsymbol{\delta} \mathbf{x}=\left[\begin{array}{c} -\mathbf{p}_{b_{k+1}}^{b_{k}}+\delta \mathbf{p} \\ -\mathbf{v}_{b_{k+1}}^{b_{k}}+\boldsymbol{\delta} \mathbf{v} \\ -\mathbf{q}_{b_{k+1}}^{b_{k}} \otimes \exp (\boldsymbol{\delta} \theta) \\ { }^{-\mathbf{b}}_{a}+\boldsymbol{\delta} \mathbf{b}_{a} \\ -\mathbf{b}_{g}+\boldsymbol{\delta} \mathbf{b}_{g} \\ -\mathbf{g}^{b_{k}}+\boldsymbol{\delta} \mathbf{g} \end{array}\right] xbk+1bk=−xbk+1bk 田 δx=⎣⎢⎢⎢⎢⎢⎢⎢⎡−pbk+1bk+δp−vbk+1bk+δv−qbk+1bk⊗exp(δθ)a−b+δba−bg+δbg−gbk+δg⎦⎥⎥⎥⎥⎥⎥⎥⎤误差状态的i线性连续时间运动模型如下: δ x ˙ ( t ) = F t δ x ( t ) + G t w \delta \dot{\mathbf{x}}(t)=\mathbf{F}_{t} \delta \mathbf{x}(t)+\mathbf{G}_{t} \mathbf{w} δx˙(t)=Ftδx(t)+Gtw其中噪声项 w = [ n a T , n g T , n b a T , n b g T ] T \mathbf{w}=\left[\mathbf{n}_{a}^{T}, \mathbf{n}_{g}^{T}, \mathbf{n}_{b_{a}}^{T}, \mathbf{n}_{b_{g}}^{T}\right]^{T} w=[naT,ngT,nbaT,nbgT]T,系数矩阵分别为: F t = [ 0 I 0 0 0 0 0 0 − R t b k [ a ^ t ] × − R t b k 0 0 0 0 − [ ω ^ t ] × 0 − I 3 − I 3 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 ] \mathbf{F}_{t}=\left[\begin{array}{cccccc} 0 & \mathbf{I} & 0 & 0 & 0 & 0 \\ 0 & 0 & -\mathbf{R}_{t}^{b_{k}}\left[\hat{\mathbf{a}}_{t}\right]_{\times} & -\mathbf{R}_{t}^{b_{k}} & 0 & 0 \\ 0 & 0 & -\left[\hat{\omega}_{t}\right]_{\times} & 0 & -\mathbf{I}_{3} & -\mathbf{I}_{3} \\ 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 \end{array}\right] Ft=⎣⎢⎢⎢⎢⎢⎢⎡000000I000000−Rtbk[a^t]×−[ω^t]×0000−Rtbk000000−I300000−I3000⎦⎥⎥⎥⎥⎥⎥⎤ G t = [ 0 0 0 0 − R t b k 0 0 0 0 − I 3 0 0 0 0 I 3 0 0 0 0 I 3 0 0 0 0 ] \mathbf{G}_{t}=\left[\begin{array}{cccc} 0 & 0 & 0 & 0 \\ -\mathbf{R}_{t}^{b_{k}} & 0 & 0 & 0 \\ 0 & -\mathbf{I}_{3} & 0 & 0 \\ 0 & 0 & \mathbf{I}_{3} & 0 \\ 0 & 0 & 0 & \mathbf{I}_{3} \\ 0 & 0 & 0 & 0 \end{array}\right] Gt=⎣⎢⎢⎢⎢⎢⎢⎡0−Rtbk000000−I3000000I3000000I30⎦⎥⎥⎥⎥⎥⎥⎤其中 a ^ t = a m t − b a \hat{\mathbf{a}}_{t}=\mathbf{a}_{m_{t}}-\mathbf{b}_{a} a^t=amt−ba, ω ^ t = ω m t − b g \hat{\omega}_{t}=\omega_{m_{t}}-\mathbf{b}_{g} ω^t=ωmt−bg,接下来是对运动模型进行离散化,如下: δ x t τ = ( I + F t τ Δ t ) δ x t τ − 1 \delta \mathbf{x}_{t \tau}=\left(\mathbf{I}+\mathbf{F}_{t_{\tau}} \Delta t\right) \delta \mathbf{x}_{t_{\tau-1}} δxtτ=(I+FtτΔt)δxtτ−1状态变量方差递推如下: P t τ = ( I + F t τ Δ t ) P t τ − 1 ( I + F t τ Δ t ) T + ( G t τ Δ t ) Q ( G t τ Δ t ) T \mathbf{P}_{t_{\tau}}=\left(\mathbf{I}+\mathbf{F}_{t_{\tau}} \Delta t\right) \mathbf{P}_{t_{\tau-1}}\left(\mathbf{I}+\mathbf{F}_{t_{\tau}} \Delta t\right)^{T}+\left(\mathbf{G}_{t \tau} \Delta t\right) \mathbf{Q}\left(\mathbf{G}_{t_{\tau}} \Delta t\right)^{T} Ptτ=(I+FtτΔt)Ptτ−1(I+FtτΔt)T+(GtτΔt)Q(GtτΔt)T其中 Δ t = t τ − t τ − 1 \Delta t=t_{\tau}-t_{\tau-1} Δt=tτ−tτ−1,而 t τ t_{\tau} tτ和 t τ − 1 t_{\tau-1} tτ−1分别是IMU的连续两个时刻, Q \mathbf{Q} Q是噪声 w \mathbf{w} w的矩阵表达。
在此基础上就可以对状态变量进行卡尔曼更新,在卡尔曼迭代滤波中,状态更新类似于优化问题,需要考虑构建一个残差,然后类似于优化一样在每一次迭代中取得不同的更新量,在LIOM中,设计的优化残差为 min δ x ∥ δ x ∥ ( P k ) − 1 + ∥ f ( − x b k + 1 b k 田 δ x ) ∥ ( J k M k J k T ) − 1 \min _{\delta \mathbf{x}}\|\delta \mathbf{x}\|_{\left(\mathbf{P}_{k}\right)^{-1}}+\| f\left({ }^{-} \mathbf{x}_{b_{k+1}}^{b_{k}} \text { 田 } \boldsymbol{\delta} \mathbf{x}\right) \|_{\left(\mathbf{J}_{k} \mathbf{M}_{\mathbf{k}} \mathbf{J}_{k}^{T}\right)^{-1}} δxmin∥δx∥(Pk)−1+∥f(−xbk+1bk 田 δx)∥(JkMkJkT)−1其中 ∥ ⋅ ∥ \|\cdot\| ∥⋅∥为 M M M范数, J k \mathbf{J}_{k} Jk为函数 f ( ⋅ ) f(\cdot) f(⋅)相对测量噪声的的雅克比,而 M k \mathbf{M}_{k} Mk为测量噪声矩阵,函数 f ( ⋅ ) f(\cdot) f(⋅)为 f i ( x b k + 1 b k ) = { ∣ ( p ^ i l k − p a l k ) × ( p ^ i l k − p b I k ) ∣ ∣ p a l k − p b l k ∣ if p i l k + 1 ∈ F e ∣ ( p ^ i k − p a l ) T ( ( p a k − p b k ) × ( p a l − p c l ) ) ∣ ∣ ( p a l k − p b l k ) × ( p a l k − p c l c ) ∣ if p i l k + 1 ∈ F p f_{i}\left(\mathbf{x}_{b_{k+1}}^{b_{k}}\right)=\left\{\begin{array}{cl} \frac{\left|\left(\hat{\mathbf{p}}_{i}^{l_{k}}-\mathbf{p}_{a}^{l_{k}}\right) \times\left(\hat{\mathbf{p}}_{i}^{l_{k}}-\mathbf{p}_{b}^{I_{k}}\right)\right|}{\left|\mathbf{p}_{a}^{l_{k}}-\mathbf{p}_{b}^{l_{k}}\right|} & \text { if } \mathbf{p}_{i}^{l_{k+1}} \in \mathbb{F}_{e} \\ \frac{\left|\left(\hat{\mathbf{p}}_{i}^{k}-\mathbf{p}_{a}^{l}\right)^{T}\left(\left(\mathbf{p}_{a}^{k}-\mathbf{p}_{b}^{k}\right) \times\left(\mathbf{p}_{a}^{l}-\mathbf{p}_{c}^{l}\right)\right)\right|}{\left|\left(\mathbf{p}_{a}^{l_{k}}-\mathbf{p}_{b}^{l_{k}}\right) \times\left(\mathbf{p}_{a}^{l_{k}}-\mathbf{p}_{c}^{l_{c}}\right)\right|} & \text { if } \mathbf{p}_{i}^{l_{k+1}} \in \mathbb{F}_{p} \end{array}\right. fi(xbk+1bk)=⎩⎪⎪⎨⎪⎪⎧∣∣palk−pblk∣∣∣∣(p^ilk−palk)×(p^ilk−pbIk)∣∣∣∣(palk−pblk)×(palk−pclc)∣∣∣∣(p^ik−pal)T((pak−pbk)×(pal−pcl))∣∣ if pilk+1∈Fe if pilk+1∈Fp其中 p ^ i l k \hat{\mathbf{p}}_{i}^{l_{k}} p^ilk是 p i l k + 1 \mathbf{p}_{i}^{l_{k+1}} pilk+1通过状态变量变换到当前帧的特征点,如下: p ^ i l k = R l b T ( R b k + 1 b k ( R l b p i l k + 1 + p l b ) + p b k + 1 b k − p l b ) \hat{\mathbf{p}}_{i}^{l_{k}}=\mathbf{R}_{l}^{b^{T}}\left(\mathbf{R}_{b_{k+1}}^{b_{k}}\left(\mathbf{R}_{l}^{b} \mathbf{p}_{i}^{l_{k+1}}+\mathbf{p}_{l}^{b}\right)+\mathbf{p}_{b_{k+1}}^{b_{k}}-\mathbf{p}_{l}^{b}\right) p^ilk=RlbT(Rbk+1bk(Rlbpilk+1+plb)+pbk+1bk−plb)如果熟悉LOAM或者Lego-LOAM算法的同学应该知道,这个就是LOAM或者Lego-LOAM算法中求解位姿构建的点到线和点到面的残差,在此就不再赘述。通过求解残差,我们可以获得迭代更新公式: K k , j = P k H k , j T ( H k , j P k H k , j T + J k , j M k J k , j T ) − 1 \mathbf{K}_{k, j}=\mathbf{P}_{k} \mathbf{H}_{k, j}^{T}\left(\mathbf{H}_{k, j} \mathbf{P}_{k} \mathbf{H}_{k, j}^{T}+\mathbf{J}_{k, j} \mathbf{M}_{k} \mathbf{J}_{k, j}^{T}\right)^{-1} Kk,j=PkHk,jT(Hk,jPkHk,jT+Jk,jMkJk,jT)−1 Δ x j = K k , j ( H k , j δ x j − f ( − x b k + 1 b k 田 δ x j ) ) \Delta \mathbf{x}_{j}=\mathbf{K}_{k, j}\left(\mathbf{H}_{k, j} \boldsymbol{\delta} \mathbf{x}_{j}-f\left({ }^{-} \mathbf{x}_{b_{k+1}}^{b_{k}} \text { 田 } \delta \mathbf{x}_{j}\right)\right) Δxj=Kk,j(Hk,jδxj−f(−xbk+1bk 田 δxj)) δ x j + 1 = δ x j + Δ x j \delta \mathbf{x}_{j+1}=\delta \mathbf{x}_{j}+\Delta \mathbf{x}_{j} δxj+1=δxj+Δxj其中 H k , j \mathbf{H}_{k, j} Hk,j为 f ( − x b k + 1 b k f\left(-\mathbf{x}_{b_{k+1}}^{b_{k}}\right. f(−xbk+1bk 田 δ x j ) \left.\boldsymbol{\delta} \mathbf{x}_{j}\right) δxj)相对 δ x j \delta \mathbf{x}_{j} δxj的雅克比,在每次迭代过程中,算法都会寻找新的匹配边界点和面点,并计算新的 H k , j \mathbf{H}_{k, j} Hk,j、 J k , j \mathbf{J}_{k, j} Jk,j和 K k , j \mathbf{K}_{k, j} Kk,j,当 f ( x b k + 1 b k ) f\left(\mathbf{x}_{b_{k+1}}^{b_{k}}\right) f(xbk+1bk)小于一定阈值或者达到n次迭代后,我们就可以更新状态变量的残差: P k + 1 = ( I − K k , n H k , n ) P k ( I − K k , n H k , n ) T + K k , n M k K k , n T \mathbf{P}_{k+1}=\left(\mathbf{I}-\mathbf{K}_{k, n} \mathbf{H}_{k, n}\right) \mathbf{P}_{k}\left(\mathbf{I}-\mathbf{K}_{k, n} \mathbf{H}_{k, n}\right)^{T}+\mathbf{K}_{k, n} \mathbf{M}_{k} \mathbf{K}_{k, n}^{T} Pk+1=(I−Kk,nHk,n)Pk(I−Kk,nHk,n)T+Kk,nMkKk,nT最后,我们初始化下一阶段 x b k + 2 b k + 1 \mathbf{x}_{b_{k+2}}^{b_{k+1}} xbk+2bk+1为: [ 0 3 , v b k + 1 b k + 1 , q 0 , b a , b g , g b k + 1 ] \left[\mathbf{0}_{3}, \mathbf{v}_{b_{k+1}}^{b_{k+1}}, \mathbf{q}_{0}, \mathbf{b}_{a}, \mathbf{b}_{g}, \mathbf{g}^{b_{k+1}}\right] [03,vbk+1bk+1,q0,ba,bg,gbk+1]其中, q 0 \mathbf{q}_{0} q0为单位旋转, v b k + 1 b k + 1 = R b k b k + 1 v b k + 1 b k \mathbf{v}_{b_{k+1}}^{b_{k+1}}=\mathbf{R}_{b_{k}}^{b_{k+1}} \mathbf{v}_{b_{k+1}}^{b_{k}} vbk+1bk+1=Rbkbk+1vbk+1bk, g b k + 1 = R b k b k + 1 g b k \mathbf{g}^{b_{k+1}}=\mathbf{R}_{b_{k}}^{b_{k+1}} \mathbf{g}^{b_{k}} gbk+1=Rbkbk+1gbk,当获得 x b k + 1 b k \mathbf{x}_{b_{k+1}}^{b_{k}} xbk+1bk后我们就可以跟新 x w b k + 1 = [ p w b k + 1 q w b k + 1 ] = [ R b k b k + 1 ( p w b k − p b k + 1 b k ) q b k b k + 1 ⊗ q w b k ] \mathbf{x}_{w}^{b_{k+1}}=\left[\begin{array}{l} \mathbf{p}_{w}^{b_{k+1}} \\ \mathbf{q}_{w}^{b_{k+1}} \end{array}\right]=\left[\begin{array}{c} \mathbf{R}_{b_{k}}^{b_{k+1}}\left(\mathbf{p}_{w}^{b_{k}}-\mathbf{p}_{b_{k+1}}^{b_{k}}\right) \\ \mathbf{q}_{b_{k}}^{b_{k+1}} \otimes \mathbf{q}_{w}^{b_{k}} \end{array}\right] xwbk+1=[pwbk+1qwbk+1]=[Rbkbk+1(pwbk−pbk+1bk)qbkbk+1⊗qwbk]
3.3 实验结果
LINS的实验结果如下:

注意这里的LIOM指的是《Tightly Coupled 3D Lidar Inertial Odometry and Mapping》中提出的基于优化的方法,从上表中可以看出,LINS精度和LIOM是相当的,但是在下表计算时间的对比中,LINS的优势就非常明显。
这里我们可以来简单理一下LIOM、LINS和MSCKF中滤波状态的区别:
三者相同点都是误差状态,都是根据IMU进行运动方程进行预测,根据激光后者视觉观测进行更新,不同点是LIOM是最基本的误差状态扩展卡尔曼滤波,状态变量中直接包括最终要估计的位姿,而LINS在滤波的状态变量中不包括最终要估计的位姿,而是前后帧相对运动结果,在MSCKF中的状态变量中除了IMU当前时刻的位姿还包括历史的相机状态,IMU相关的状态变量方差在预测过程中预测,而相机相关的状态变量的方差在扩增时预测,因此这三者是各有不同的。
4. LIO-SAM
4.1 总体框架
LIO-SAM总体框如下图所示

从图中可以看出来,IMU数据除了用来构建IMU预积分因子之外,还用来进行激光雷达去即便操作,在IMU预积分完成后,在将IMU将里程计作为先验用来获取激光里程计,激光里程计除了进行Scan-to-Map的匹配之外,还构建一个包括激光雷达因子、GPS因子和回环因子的因子图,用来优化地图和激光里程计的结果,优化后的激光里程计的结果再传递回IMU预积分节点,构建IMU预积分因子图,包括激光里程计因子、IMU预分因子和IMU测量Bias的因子,在论文中给出的因子图如下(看起来是一个,实现起来其实是两个):

因子图中包括IMU预积分因子、激光雷达里程计因子、GPS因子、回环因子。而我们要估计的状态变量为: x = [ R T , p T , v T , b T ] T \mathbf{x}=\left[\mathbf{R}^{\mathbf{T}}, \mathbf{p}^{\mathbf{T}}, \mathbf{v}^{\mathbf{T}}, \mathbf{b}^{\mathbf{T}}\right]^{\mathbf{T}} x=[RT,pT,vT,bT]T整个优化过程是建立在用于增量平滑的Bayers Tree上的,关于因子图基础知识、Bayers Tree、以及LIO-SAM中关于因子图构建的部分代码我都总结在GTSAM Tutorial学习笔记,下面我仅仅对LIO-SAM中各个因子的基本原理进行介绍。
4.2 因子图构建
在LIO-SAM的因子图中一个有四种因子,我们分别介绍
IMU预积分因子:
IMU从时刻 t t t积分到 t + Δ t t+\Delta t t+Δt的公式为 v t + Δ t = v t + g Δ t + R t ( a ^ t − b t a − n t a ) Δ t \mathbf{v}_{t+\Delta t}=\mathbf{v}_{t}+\mathbf{g} \Delta t+\mathbf{R}_{t}\left(\hat{\mathbf{a}}_{t}-\mathbf{b}_{t}^{\mathbf{a}}-\mathbf{n}_{t}^{\mathbf{a}}\right) \Delta t vt+Δt=vt+gΔt+Rt(a^t−bta−nta)Δt p t + Δ t = p t + v t Δ t + 1 2 g Δ t 2 + 1 2 R t ( a ^ t − b t a − n t a ) Δ t 2 \begin{aligned} \mathbf{p}_{t+\Delta t}=\mathbf{p}_{t} &+\mathbf{v}_{t} \Delta t+\frac{1}{2} \mathbf{g} \Delta t^{2}+\frac{1}{2} \mathbf{R}_{t}\left(\hat{\mathbf{a}}_{t}-\mathbf{b}_{t}^{\mathbf{a}}-\mathbf{n}_{t}^{\mathbf{a}}\right) \Delta t^{2} \end{aligned} pt+Δt=pt+vtΔt+21gΔt2+21Rt(a^t−bta−nta)Δt2 R t + Δ t = R t exp ( ( ω ^ t − b t ω − n t ω ) Δ t ) \mathbf{R}_{t+\Delta t}=\mathbf{R}_{t} \exp \left(\left(\hat{\boldsymbol{\omega}}_{t}-\mathbf{b}_{t}^{\boldsymbol{\omega}}-\mathbf{n}_{t}^{\boldsymbol{\omega}}\right) \Delta t\right) Rt+Δt=Rtexp((ω^t−btω−ntω)Δt)其中 ω ^ t = ω t + b t ω + n t ω \hat{\boldsymbol{\omega}}_{t}=\boldsymbol{\omega}_{t}+\mathbf{b}_{t}^{\omega}+\mathbf{n}_{t}^{\omega} ω^t=ωt+btω+ntω a ^ t = R t B W ( a t − g ) + b t a + n t a \hat{\mathbf{a}}_{t}=\mathbf{R}_{t}^{\mathrm{BW}}\left(\mathbf{a}_{t}-\mathbf{g}\right)+\mathbf{b}_{t}^{\mathrm{a}}+\mathbf{n}_{t}^{\mathrm{a}} a^t=RtBW(at−g)+bta+nta R t = R t W B = R t B W ⊤ \mathbf{R}_{t}=\mathbf{R}_{t}^{\mathbf{W B}}=\mathbf{R}_{t}^{\mathbf{B} W^{\top}} Rt=RtWB=RtBW⊤其中预积分测量值为: Δ v i j = R i ⊤ ( v j − v i − g Δ t i j ) \Delta \mathbf{v}_{i j}=\mathbf{R}_{i}^{\top}\left(\mathbf{v}_{j}-\mathbf{v}_{i}-\mathbf{g} \Delta t_{i j}\right) Δvij=Ri⊤(vj−vi−gΔtij) Δ p i j = R i ⊤ ( p j − p i − v i Δ t i j − 1 2 g Δ t i j 2 ) \Delta \mathbf{p}_{i j}=\mathbf{R}_{i}^{\top}\left(\mathbf{p}_{j}-\mathbf{p}_{i}-\mathbf{v}_{i} \Delta t_{i j}-\frac{1}{2} \mathbf{g} \Delta t_{i j}^{2}\right) Δpij=Ri⊤(pj−pi−viΔtij−21gΔtij2) Δ R i j = R i ⊤ R j \Delta \mathbf{R}_{i j}=\mathbf{R}_{i}^{\top} \mathbf{R}_{j} ΔRij=Ri⊤Rj从公式可以看出来,LIO-SAM中定义的预积分和我们在LIOM和VINS-Mono中定义预积分结果都不太一样,因为在LIO-SAM的代码实现中是直接是用GTSAM中自带的预积分类实现的,这个类中具体怎么实现预积分的还有待考证,初次之泰,IMU Bias因子作为除IMU预积分因子之外单独的一部分参与联合优化。
激光里程计因子
激光里程计和LOAM的原理基本一样,但是区别是LIO-SAM中的构建了关键帧,地图也是利用关键中的特征点构建的局部地图 M i = { M i e , M i p } \mathbf{M}_{i}=\left\{\mathbf{M}_{i}^{e}, \mathbf{M}_{i}^{p}\right\} Mi={Mie,Mip}其中 M i e = ′ F i e ∪ ′ F i − 1 e ∪ … ∪ ′ F i − n e \mathbf{M}_{i}^{e}={ }^{\prime} \mathrm{F}_{i}^{e} \cup^{\prime} \mathrm{F}_{i-1}^{e} \cup \ldots \cup^{\prime} \mathrm{F}_{i-n}^{e} Mie=′Fie∪′Fi−1e∪…∪′Fi−ne M i p = ′ F i p ∪ ′ F i − 1 p ∪ … ∪ ′ F i − n p \mathbf{M}_{i}^{p}={ }^{\prime} \mathrm{F}_{i}^{p} \cup^{\prime} \mathrm{F}_{i-1}^{p} \cup \ldots \cup^{\prime} \mathrm{F}_{i-n}^{p} Mip=′Fip∪′Fi−1p∪…∪′Fi−np然后是利用Scan-to-Map的原理进行计算的
GPS因子
当接收到GPS测量后,我们首先变换它们到笛卡尔坐标系中。当一个新的位姿节点被插入到因子图后,我们关联GPS因子到该位姿节点中去。具体地,我们线性插值GPS的时间戳,得到对应最新位姿节点的GPS位置。
由于在GPS信号一直存在的时候,持续添加GPS因子没有意义。因为漂移很缓慢。所以在实际操作过程中,我们只添加GPS因子当位姿估计协方差矩阵变得很大的时候。
这一部分原理介绍还是很简单的,因为因子图的构建基于GTSAM本来就很简介,LIO-SAM不太一样的地方其实是一种“半紧耦合”是解决方案,先获得IMU里程计和激光雷达里程计,然后通过因子图的方式将两者结合起来,没那么紧的融合方式效果也很好
4.3 实验结果
LIO-SAM的实验结果是非常惊艳的,如下图所示:

以及RMSE结果的对比

但是我在别人的博客里看到有同学提到,算法在自己平台上实现效果不是很好,算法我还没有自己跑起来过,之后有时间再测评下。
以上就是所有内容,有问题欢迎交流!
此外,对其他SLAM算法感兴趣的同学可以看考我的博客SLAM算法总结——经典SLAM算法框架总结