python opencv图像笔记
下载依赖
选择镜像源,这样下载快一点
切换源
清华:https://pypi.tuna.tsinghua.edu.cn/simple
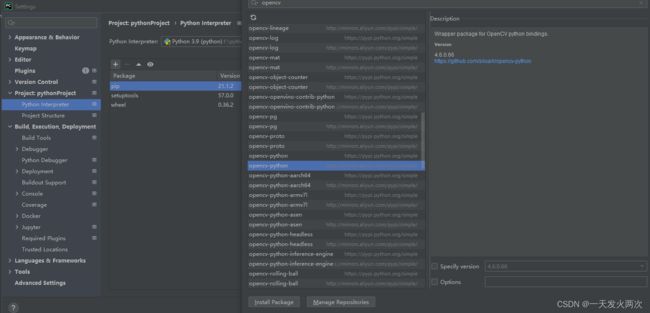
阿里云:http://mirrors.aliyun.com/pypi/simple/
中国科技大学 https://pypi.mirrors.ustc.edu.cn/simple/
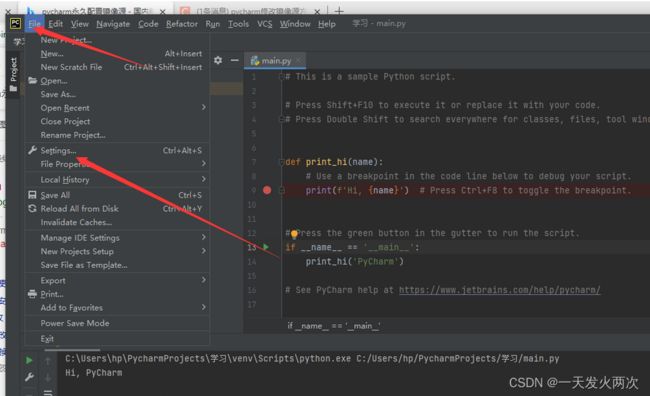

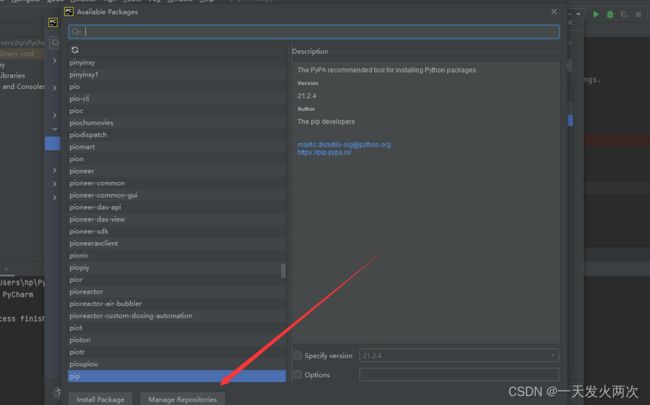

安装依赖

第一个打开图片的代码
import cv2
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
cv2.imshow('展示',img)
#等待一段时间
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果图
创建和显示窗口
namedWindow(winname,flag) 命名窗口名称和窗口类型
imshow() 显示窗口
destoryAllWindows() 销毁所有窗口
resizeWindow() 设置窗口大小
namedWindow(winname,flag)中flag的参数
- WINDOW_NORMAL 可以拖动大小
- WINDOW_AUTOSIZE 操作窗口的用户不能改变窗口的大小,窗口的大小取决于图像的大小。
- WINDOW_OPENGL 创建的窗口可支持OPENGL。OpenGL(英语:Open Graphics Library,译名:开放图形库或者“开放式图形库”)是用于渲染2D、3D矢量图形的跨语言、跨平台的应用程序编程接口(API)。
- WINDOW_FULLSCREEN 创建的窗口以全屏的形式显示…但实际操作中发现并没有实现全屏显示
- WINDOW_FREERATIO 图像窗口可以以任意宽高比例显示,即不固定宽高比例
- WINDOW_KEEPRATIO 图像窗口的宽高比例保持不变。
- WINDOW_GUI_EXPANDED 图像窗口可以添加状态栏和工具栏。
- WINDOW_GUI_NORMAL 老式窗口,即没有状态栏和工具栏的图像窗口
演示
import cv2
def start():
cv2.namedWindow("窗口",cv2.WINDOW_NORMAL)
cv2.resizeWindow("窗口",1920,1080)
cv2.imshow("窗口",0)
key=cv2.waitKey(0)
if(key & 0xFF==ord('q')):
cv2.destroyAllWindows()
if __name__ == '__main__':
start()
加载显示图片
imread(path,flag)
imread(path,flag)中flag的参数
cv2.IMREAD_COLOR:默认参数,读入一副彩色图片,忽略alpha通道,可用1作为实参替代
cv2.IMREAD_GRAYSCALE:读入灰度图片,可用0作为实参替代
cv2.IMREAD_UNCHANGED:顾名思义,读入完整图片,包括alpha通道,可用-1作为实参替代
PS:alpha通道,又称A通道,是一个8位的灰度通道,该通道用256级灰度来记录图像中的透明度复信息,定义透明、不透明和半透明区域,其中黑表示全透明,白表示不透明,灰表示半透明
演示:
import cv2
def start():
cv2.namedWindow("窗口",cv2.WINDOW_NORMAL)
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png',cv2.IMREAD_GRAYSCALE)
cv2.imshow("窗口",img)
key=cv2.waitKey(0)
if(key & 0xFF==ord('q')):
cv2.destroyAllWindows()
if __name__ == '__main__':
start()
保存图片
imwrite(name,img)
name,要保存的文件名
img,是Mat类型
import cv2
def start():
cv2.namedWindow("窗口",cv2.WINDOW_NORMAL)
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png',cv2.IMREAD_GRAYSCALE)
cv2.imshow("窗口",img)
key=cv2.waitKey(0)
print(key)
if(key & 0xFF==ord('q')):
cv2.destroyAllWindows()
elif(key & 0xFF==ord('s')):
cv2.imwrite("C:\\Users\\Zz\\Desktop\\img.png",img)
cv2.destroyAllWindows()
if __name__ == '__main__':
start()
调用摄像头
VideoCapure() 视频采集器 一般设备号从0开始 第二个参数为api,不同平台api不一样
cap.read() 读取视频帧 返回两个值,一个为状态值,读到帧为true,另一个为视频帧
cap.release() 释放资源
import cv2
def start():
# 创建窗口
cv2.namedWindow("窗口",cv2.WINDOW_NORMAL)
#获取视频设备
cap=cv2.VideoCapture("http://admin:[email protected]:8081")
while True:
ret,frame=cap.read()
cv2.imshow("窗口",frame)
key=cv2.waitKey(1)
if (key & 0xFF == ord('q')):
break
cap.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
start()
从多媒体文件中读取视频帧
import cv2
def start():
# 创建窗口
cv2.namedWindow("窗口",cv2.WINDOW_NORMAL)
#获取多媒体视频
cap=cv2.VideoCapture("C:\\Users\\Zz\\Desktop\\2.mp4")
while True:
ret,frame=cap.read()
cv2.imshow("窗口",frame)
key=cv2.waitKey(10)
if (key & 0xFF == ord('q')):
break
cap.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
start()
将视频数据录制成多媒体
VideoWriter 参数一为输出文件 参数二为多媒体文件格式(VideoWrite_fourcc) 参数三为帧率 参数四为分辨率大小 参数四为是否带有颜色默认true
write
release
cv.VideoWriter_fourcc('M','J','P','G') 或者cv.VideoWriter_fourcc(*'MJPG')
代码演示
import cv2
def start():
#fourcc= cv2.VideoWriter_fourcc('M','J','P','G')
#因为这里保存的是视频,所以用MP4v
fourcc = cv2.VideoWriter_fourcc('m', 'p', '4', 'v')
vw=cv2.VideoWriter("C:\\Users\\Zz\\Desktop\\3.mp4",fourcc,25,(1920,1080))
# 创建窗口
cv2.namedWindow("窗口",cv2.WINDOW_NORMAL)
#获取多媒体视频
cap=cv2.VideoCapture("C:\\Users\\Zz\\Desktop\\2.mp4")
while True:
ret,frame=cap.read()
cv2.imshow("窗口",frame)
#写数据到多媒体
vw.write(frame)
key=cv2.waitKey(1)
if (key & 0xFF == ord('q')):
break
cap.release()
cv2.destroyAllWindows()
#释放资源
vw.release()
if __name__ == '__main__':
start()
代码优化
1.视频窗口被撑大
因为视频分辨率比较大,把窗口撑大,我们可以在循环中设置窗口大小
while True:
ret,frame=cap.read()
cv2.imshow("窗口",frame)
cv2.resizeWindow("窗口",1920,1080)
#写数据到多媒体
vw.write(frame)
key=cv2.waitKey(1)
if (key & 0xFF == ord('q')):
break
2.检测摄像头是否被打开
isOpened()
while cap.isOpened():
ret,frame=cap.read()
if ret == True:
cv2.imshow("窗口",frame)
cv2.resizeWindow("窗口",1920,1080)
#写数据到多媒体
vw.write(frame)
key=cv2.waitKey(1)
if (key & 0xFF == ord('q')):
break
else:
break
openCV控制鼠标
setMouseCallback(winname,callback,userdata) 第一个参数是窗口名 第二个参数是回调函数 第三个函数是给回调函数传参
callback(event,x,y,flags,userdata) event:鼠标移动、按下左键 x,y:鼠标坐标 flags:鼠标键及组合键
实操代码
import cv2
import numpy as np
def mouse_callback(event,x,y,flags,userdata):
print(event,x,y,flags,userdata)
def start():
cv2.namedWindow("mouse",cv2.WINDOW_NORMAL)
cv2.resizeWindow('mouse',640,360)
#设置鼠标回调
cv2.setMouseCallback('mouse',mouse_callback,"123")
#生成纯黑照片
img=np.zeros((360,640,3),np.uint8)
while True:
cv2.imshow("mouse",img)
key = cv2.waitKey(1)
if key & 0xFF ==ord('q'):
break
if __name__ == '__main__':
start()
TrackBar 控件
createTrackbar(trackbarname,winname,value:trackbar,count,callback,userdata) 第一个参数控件的名字,第二个是窗口的名字,第三个是当前值
第四个是最大值 最小值为0。第五个是回调函数和传参
getTrackbarPos(trackbarname,winname)输出当前值
import cv2
import numpy as np
def callback():
pass
def start():
cv2.namedWindow('tracker',cv2.WINDOW_NORMAL)
cv2.createTrackbar('R','tracker',0,255,callback)
cv2.createTrackbar('G', 'tracker', 0, 255, callback)
cv2.createTrackbar('B', 'tracker', 0, 255, callback)
img=np.zeros((480,460,3),np.uint8)
while True:
r=cv2.getTrackbarPos('R',"tracker")
g=cv2.getTrackbarPos('G', "tracker")
b=cv2.getTrackbarPos('B', "tracker")
#操作所有像素
img[:] = [b,g,r]
cv2.imshow("tracker", img)
key=cv2.waitKey(10)
if (key &0xFF ==ord('q')):
break
cv2.destroyAllWindows()
if __name__ == '__main__':
start()

opencv中的色彩空间
- 色彩空间变换
- 像素访问
- 矩阵的加减乘除
- 基本图形的绘制
颜色空间
- RGB:人眼的色彩空间 (主要用在显示器物理硬件中)
- opencv默认使用BGR
- HSV/HSB/HSL 第一个HSV是色相色调饱和度 第二个是明亮度 第三个???
- YUV 主要用于视频 ,视频储存节省空间
HSV (主要用在opencv)
- Hue:色相,即色彩,如红色、蓝色
- Saturation : 饱和度,颜色的纯度
- Value:明度
HSL
- Hue:色相,即色彩,如红色、蓝色
- Saturation : 饱和度,颜色的纯度
- Ligthness:明度
YUV
三种类型 对像素的描述 黑白 色彩
- YUV4:2:0
- YUV4:2:2
- YUV4:4:4
色彩空间转换
import cv2
import numpy as np
def callback():
pass
def start():
cv2.namedWindow('color',cv2.WINDOW_NORMAL)
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
cv2.imshow("color",img)
colorspace = [cv2.COLOR_BGR2RGBA,cv2.COLOR_BGR2BGRA,cv2.COLOR_BGR2GRAY,cv2.COLOR_BGR2HSV,cv2.COLOR_BGR2YUV]
cv2.createTrackbar('curcolor','color',0,len(colorspace)-1,callback)
while True:
index=cv2.getTrackbarPos('curcolor','color')
#颜色转换API
cvt_img=cv2.cvtColor(img,colorspace[index])
cv2.imshow('color',cvt_img)
key=cv2.waitKey(10)
if (key &0xFF ==ord('q')):
break
cv2.destroyAllWindows()
if __name__ == '__main__':
start()
Numpy
Opencv中用到的矩阵都要转换为Numpy数组
Numpy是一个高度优化的python数值库
Numpy基本操作
- 创建矩阵
- 检索与赋值[y,x]
- 获取子矩阵[:,:]
创建矩阵 array()
创建全0矩阵 zeros() / ones
创建全值数组 full()
创建单元数组 identity/eye()
1.array
- a=np.array([2,3,4])
- c=np.array([[2,3,4],[6,5,4]])
2.zeros
- a=np.zeros((480,640,3),np.uint8)
(480,640,3) (行的个数,列的个数,通道数/层数)
np.uint8是矩阵中的数据类型
3.ones
- a=np.ones((480,640,3),np.uint8)
(480,640,3) (行的个数,列的个数,通道数/层数)
np.uint8是矩阵中的数据类型
4.full
- a=np.full((480,640,3),255,np.uint8)
(480,640,3) (行的个数,列的个数,通道数/层数)
np.uint8是矩阵中的数据类型
255是每个元素的数值
5.identity 单元矩阵
- c=np.identity(3)
斜对角是1,其它为0
[1,0,0]
[0,1,0]
[0,0,1]
**5.eye **
- c=np.eye(3,4,k=2)
斜对角是1,其它为0
k=2 代表从第二个开始
[0,0,1,0]
[0,0,0,1]
[0,0,0,0]
Numpy 检索与赋值
- [y,x] //灰度
- [y,x,channel] //RGB
import cv2
import numpy as np
def callback():
pass
def start():
cv2.namedWindow('color',cv2.WINDOW_NORMAL)
img = np.zeros((720,720,3),np.uint8)
x = 0
while x<360:
#绿色通道,所以会成为绿色
img[360,x,1]=255
x=x+1
cv2.imshow("color",img)
key=cv2.waitKey(0)
if (key &0xFF ==ord('q')):
cv2.destroyAllWindows()
if __name__ == '__main__':
start()

这样赋值也可以
img[360, x] = [0,0,255]
Region of Image(ROI)
Numpy获取子矩阵
- [y1:y2:x1:x2]
- [:,:] 所有图像操作
roi=img[100:200:,100:200]
roi[:,:]=[0,255,0]
img[100:200:,100:200]= [0,255,0]
cv2.imshow("color",img)
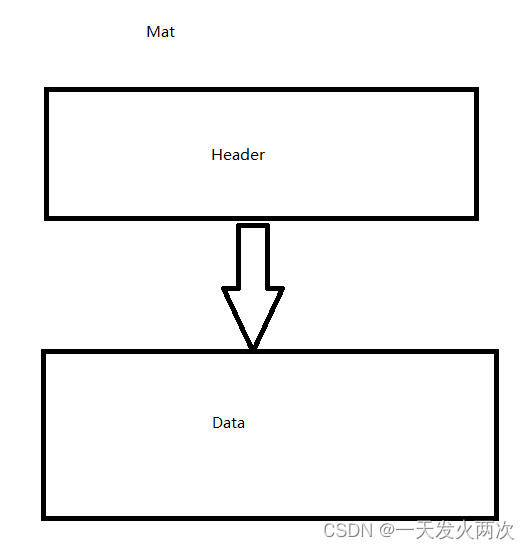
opencv最重要的结构体Mat
Mat是什么? Mat是一个矩阵
Mat有什么好处? 可以通过umpy矩阵的方式来访问
Mat:
mat头部属性:
class CV_EXPORTS Mat{
public:
...
int dims; //维数
int rows,cols; //行列数
uchar *data //储存数据的指针
int *refcount; //引用计数 避免内存泄漏
...
}
| 字段 | 说明 |
|---|---|
| dims | 维度 |
| rows | 行数 |
| cols | 列数 |
| depth | 像素位深 |
| channels | 通道数RGB是3 |
| size | 矩阵大小 |
| type | dep+dt+chs CV_8UC3 |
| data | 存放数据 |
Mat 拷贝
浅拷贝

import cv2
import numpy as np
def callback():
pass
def start():
cv2.namedWindow('color',cv2.WINDOW_NORMAL)
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
#浅拷贝
img2=img
index = 0
img2[10:500,10:500]=[0,255,255]
cv2.imshow("color",img)
while True:
key=cv2.waitKey(10)
if (key &0xFF ==ord('q')):
break
cv2.destroyAllWindows()
if __name__ == '__main__':
start()
深拷贝
# 深拷贝
img2=img.copy()
访问Mat的属性
- img.shape ------------- 打印结果: (4032,3024,3) #高度,长度和通道数
- img.size ------------- 打印结果: 36578304 #高度x长度x通道数=
- img.dtype ------------- 打印结果:uint8 位深
通道分离与合并
- split(mat) 分离通道
- merge((ch1,ch2,…))融合通道
import cv2
import numpy as np
def callback():
pass
def start():
cv2.namedWindow('color',cv2.WINDOW_NORMAL)
img = np.zeros((480,640,3),np.uint8)
b,g,r=cv2.split(img)
b[10:100,10:100]=255
g[210:300,210:300]=110
r[50:250,50:250]=255
img2 = cv2.merge((b,g,r))
cv2.imshow("color", img2)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == '__main__':
start()

opencv绘制图形
划线
line(img,开始点,结束点,颜色...)
参数详解
- img:在哪个图像上画线
- 开始点结束点:指定线的开始位置和结束位置
- 颜色、线宽、线形
- Shift:坐标缩放比例
import cv2
import numpy as np
def start():
img=np.zeros((480,640,3),np.uint8)
#画线(x,y) 5是线宽 16是线型(抗锯齿)
cv2.line(img,(100,20),(400,400),(0,0,255),5,16)
cv2.line(img, (200, 20), (400, 600), (0, 0, 255), 5, 4)
cv2.imshow("画板", img)
cv2.waitKey(0)
if __name__ == '__main__':
start()

绘制椭圆
ellipse(img,中心点,长宽的一半,角度,从哪个角度开始,从哪个角度结束...)
是按顺时针计算,0度从右侧开始
#画椭圆
cv2.ellipse(img,(240,320),(100,50),0,0,360,(0,0,255))

#画椭圆
cv2.ellipse(img,(240,320),(100,50),0,45,360,(0,0,255),-1)

opencv 绘制多边形
polylines(img,点集,是否闭环,颜色,...) #点集必须是32位
代码:
#画多边形
pts= np.array([(300,10),(150,100),(450,100)],np.int32)
cv2.polylines(img,[pts],True,(0,0,255))
运行效果:

填充多边形
fillPoly(img,点集,颜色)
代码:
#填充多边形
cv2.fillPoly(img,[pts],(255,0,0))
运行效果:

opencv绘制文本
cv2.putText(img,字符串,启始点,字体,字号,...)
代码:
#绘制文本
cv2.putText(img,"我超hello!!",(250,150),cv2.FONT_HERSHEY_PLAIN,1,(0,0,255))
运行效果:

课后作业画板
import cv2
import numpy as np
start=(0,0)
end=(0,0)
num=0
def mouse_callback(event,x,y,flags,userdata):
global start
global end
#print(event, x, y, flags, userdata)
if(event& cv2.EVENT_LBUTTONDOWN==cv2.EVENT_LBUTTONDOWN):
start=(x,y)
print(start)
elif(event& cv2.EVENT_LBUTTONUP==cv2.EVENT_LBUTTONUP):
end=(x,y)
print(end)
le= (abs( start[0]-end[0]),abs(start[1]-end[1]))
print(le)
if(userdata[0]=='c'):
cv2.ellipse(userdata[2],start,le,0,0,360,userdata[1])
else:
cv2.line(userdata[2],start,end,userdata[1],5)
cv2.imshow("drawtable",userdata[2])
def start():
#创建一个黑色图片
img = np.zeros((480,640,3),np.uint8)
#显示黑色图片
cv2.imshow("drawtable",img)
# 通过读取按键来执行
shape = 'l'
color = (0, 0, 225)
#监听鼠标
cv2.setMouseCallback("drawtable",mouse_callback,[shape, color,img])
while True:
# 等待获取按键
key = cv2.waitKey(0)
if(panduankey(key,'q')):
break
elif(panduankey(key,'c')):
shape='c'
elif(panduankey(key,'l')):
shape='l'
elif(panduankey(key,'r')):
color=(0,0,225)
elif (panduankey(key, 'b')):
color =(225,0,225)
cv2.setMouseCallback("drawtable", mouse_callback, [shape, color,img])
cv2.destroyAllWindows()
def panduankey(key,let):
if (key &0xFF== ord(let)):
return True
else:
return False
if __name__ == '__main__':
start()

图运算
- 两个图相加
- 两个图相减
- 两个图相乘
- 两个图相除
1.两张图相加
import cv2
import numpy as np
def start():
cv2.namedWindow('color', cv2.WINDOW_NORMAL)
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
img2= np.ones(img.shape,np.uint8) *50
img3= cv2.add(img,img2)
cv2.imshow('color',img3)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:图片更白了
2.两张图相减
subtract(A,B) #A减B
3.两张图相乘
multiply(A,B) #亮的更多一些
4.两张图相除
divide(A,B) #暗的更多一些
图像融合
addWeighted(A,alpha,B,bate,gamma)
- alpha和beta是 a和b权重
- gamma 静态权重
代码:
import cv2
import numpy as np
def start():
cv2.namedWindow('color', cv2.WINDOW_NORMAL)
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
img2= cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr2.png')
img3= cv2.addWeighted(img,0.7,img2,0.3,0)
cv2.imshow('color',img3)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果图
图像位运算
- 与
- 或
- 非
- 异或
1.非运算
bitwise_not(img)
代码:
import cv2
import numpy as np
def start():
cv2.namedWindow('color', cv2.WINDOW_NORMAL)
img = np.zeros((200,200),np.uint8)
img[50:150,50:150] =255
img2= cv2.bitwise_not(img)
cv2.imshow('img', img)
cv2.imshow('img2',img2)
cv2.waitKey(0)
if __name__ == '__main__':
start()
显示:

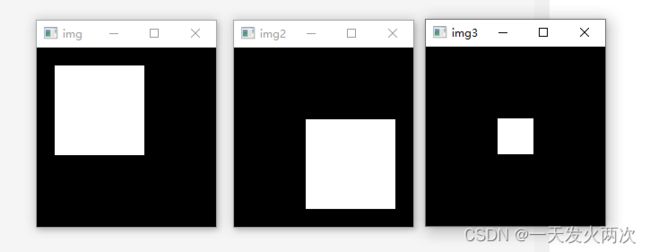
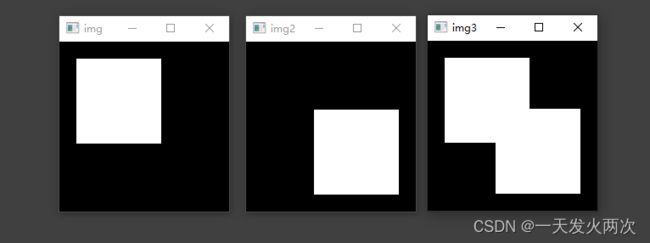
2.与运算
cv2.bitwise_and(img,img2)
代码:
import cv2
import numpy as np
def start():
cv2.namedWindow('color', cv2.WINDOW_NORMAL)
img = np.zeros((200,200),np.uint8)
img2 = np.zeros((200, 200), np.uint8)
img[20:120,20:120] =255
img2[80:180,80:180] =255
img3= cv2.bitwise_and(img,img2)
cv2.imshow('img', img)
cv2.imshow('img2',img2)
cv2.imshow('img3', img3)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:
3.或运算
cv2.bitwise_or(img,img2)
效果:
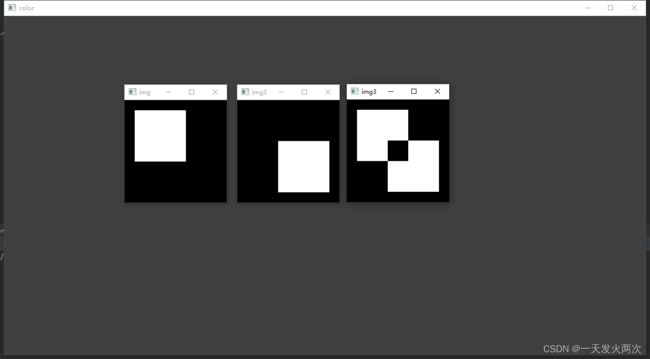
4.异或运算
cv2.bitwise_xor(img,img2)
效果:
给图片添加水印
- 引入一张图片
- 创建一个logo
- 计算在什么位置添加,在添加的地方变黑
- 利用add 将logo与图片叠加到一起
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
logo = np.zeros((200,200,3),np.uint8)
mask= np.zeros((200,200),np.uint8)
#绘制logo
logo[20:120,20:120] =[0,0,255]
logo[80:180, 80:180] = [0, 255, 0]
mask[20:120,20:120] =255
mask[80:180, 80:180] = 255
#对mask求反
m=cv2.bitwise_not(mask)
#选择img添加logo的位置
roi =img[0:200,0:200]
#与m进行与操作
tmp=cv2.bitwise_and(roi,roi,mask=m)
dst=cv2.add(tmp,logo)
img[0:200,0:200] = dst
cv2.imshow('img', img)
cv2.waitKey(0)
if __name__ == '__main__':
start()
演示:
图片加汉字生成二维码
首先引入 qrcode和pillow库
然后下载字体文件下载地址
代码:
import cv2
import numpy as np
from PIL import Image,ImageDraw,ImageFont
import qrcode
'''把二维码放置在原图的右下角'''
def comblex_pic(base_img, myQR):
myQR_w, myQR_h = myQR.size
base_img_w, base_img_h = base_img.size
paste_location = (base_img_w-myQR_w, base_img_h-myQR_h, base_img_w, base_img_h)
base_img.paste(myQR, paste_location)
return base_img
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
logo = np.zeros((200,200,3),np.uint8)
mask= np.zeros((200,200),np.uint8)
#绘制logo
logo[20:120,20:120] =[0,0,255]
logo[80:180, 80:180] = [0, 255, 0]
mask[20:120,20:120] =255
mask[80:180, 80:180] = 255
#对mask求反
m=cv2.bitwise_not(mask)
#选择img添加logo的位置
roi =img[0:200,0:200]
#与m进行与操作
tmp=cv2.bitwise_and(roi,roi,mask=m)
dst=cv2.add(tmp,logo)
img[0:200,0:200] = dst
#将img转换为PIL格式
img_pil=Image.fromarray(cv2.cvtColor(img,cv2.COLOR_BGR2RGB))
#字体路径
font=ImageFont.truetype('font.ttf',38)
#字体颜色
fillColor=(0,0,225)
draw=ImageDraw.Draw(img_pil)
draw.text((1000,500),"这是一条信息",font=font,fill=fillColor)
#二维码
imgqrc = qrcode.make("https://www.bilibili.com/")
# 二维码添加至原图右下角
comblepic = comblex_pic(img_pil, imgqrc)
# 显示图片
comblepic.show()
print(img)
# 转回opencv格式
img = cv2.cvtColor(np.asarray(img_pil), cv2.COLOR_RGB2BGR)
cv2.imshow('img', img)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:
图像的变换
1.图像的缩放
resize(src,dst,dsize,fx,fy,interpolation) //第一个参数图片地址 第二个参数输出参数(python中不用) 第三个参数缩放大小 fx:x轴缩放因子 fy:y轴的缩放因子 interpolation 缩放算法
interpolation 缩放算法:
- INTER_NEAREST 临近插值,速度快,效果差
- INTER_LINEAR 双线性插值,原图中的四个点(默认)
- INTER_CUBIC 三次插值,原图中的16个点
- INTER_AREA,效果最好
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
img2= cv2.resize(img,(400,400)) // img2 = cv2.resize(img, None,fx=0.3,fy=0.3,interpolation=cv2.INTER_AREA)
#与m进行与操作
cv2.imshow('img', img2)
cv2.waitKey(0)
if __name__ == '__main__':
start()
2.图像反转
flip(img,flipCode)
- fileCode==0,上下
- fileCode>0,左右
- fileCode<0,上下+左右
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
img2=cv2.flip(img,0)
cv2.imshow('img', img2)
cv2.waitKey(0)
if __name__ == '__main__':
start()
3.图像的旋转
rotate(img,rotateCode)
- ROTATE_90_CLOCKWIZE
- ROTATE_180
- ROTATE_90_COUNTERCLOCKWISE (旋转270度)
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
img2=cv2.rotate(img,cv2.ROTATE_90_COUNTERCLOCKWISE)
cv2.imshow('img', img2)
cv2.waitKey(0)
if __name__ == '__main__':
start()
3.图像的仿射变换
仿射变换是图像的旋转、缩放、平移的总称
warpAffine(src,M,dsize,flags,mode,value)
M:变换矩阵
dsize:输出尺寸大小
flags:与resize中的插值算法一致
mode:边界外推法标志
value:填充边界的值
平移矩阵
矩阵中每个像素由(x,y)组成
因此,其变换矩阵是2x2的矩阵
平移向量位2x1的向量,所以平移矩阵位2x3矩阵
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
#必须是32位,因为计算精度较高
M=np.float32([[1,0,100],[0,1,0]])
h,w,ch=img.shape
img2=cv2.warpAffine(img,M,(w,h))
cv2.imshow('img', img2)
cv2.waitKey(0)
if __name__ == '__main__':
start()
图片:
变换矩阵
getRotationMatrix2D(center,angle,scale)
center 中心点
angle 角度
scale 缩放比例
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
#必须是32位,因为计算精度较高
#M=np.float32([[1,0,100],[0,1,0]])
h,w,ch=img.shape
M2= cv2.getRotationMatrix2D((100,100),15,1.5)
img2=cv2.warpAffine(img,M2,(w,h))
cv2.imshow('img', img2)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:
中心点旋转
#(w/2,h/2)中心点
M2= cv2.getRotationMatrix2D((w/2,h/2),15,1.5)
修改图片修改后的大小
#如果想要修改图片大小,需要在这里修改
img2 = cv2.warpAffine(img, M2, (w/2, h/2))
变换矩阵 二
getAffineTransform(src[],dst[])
三个点可以确定变换的位置
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
#必须是32位,因为计算精度较高
src=np.float32([[400,300],[800,300],[400,1000]])
dst=np.float32([[200,400],[600,500],[150,1100]])
h,w,ch=img.shape
#(w/2,h/2)中心点
M2= cv2.getAffineTransform(src,dst)
print(M2)
#如果想要修改图片大小,需要在这里修改
img2 = cv2.warpAffine(img, M2, (w, h))
cv2.imshow('img', img2)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:
滤波器
滤波的作用
一幅图像通过滤波器得到另一幅图像;
其中滤波器又称为卷积核,滤波的过程成为卷积;
图像卷积的效果 — 
锐化
卷积的过程
卷积的几个基本概念
- 卷积核的大小
- 锚点
- 边界扩充
- 步长
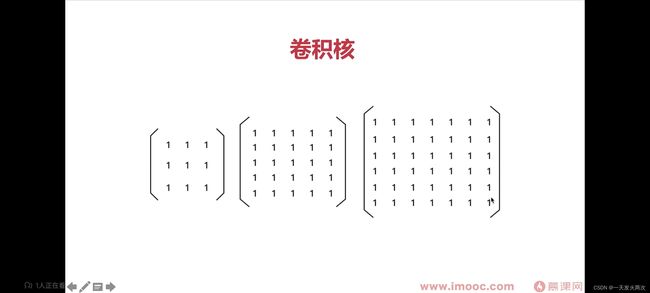
卷积核的大小
卷积核一般是奇数,如3x3,5x5、7x7
原因是:
- 增加padding的原因
- 保证锚点在中间,防止位置发生偏移的原因
卷积核大小的影响
在深度学习中,卷积核越大,得到的信息(感受野)越大,提取的特征越好,同时计算量也越大
锚点

边界扩充
- 当卷积核大于1且不进行边界扩充,输出尺寸将相应缩小
- 当卷积核以标准方式进行边界扩充,则输出数据的空间尺寸将与输入相等
计算公式
N = (W - F + 2P)/S+1
N输出图像大小
W源图大小;F卷积核大小;P扩充尺寸
S步长大小
步长

实战图像卷积
低通滤波与高通滤波
- 低通滤波可以去除噪音和平滑图像
- 高通滤波可以帮助查找图像边缘
图像卷积
filter2D(src,ddepth,kernel,anchor,delta,borderType)
ddepth 位深 一般-1
kernel 卷积核
anchor 锚点
delta 默认是0
borderType 边界类型
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
kernal=np.ones((5,5),np.float32)/25
img2=cv2.filter2D(img,-1,kernal)
cv2.imshow('img', img2)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:
方盒滤波与均值滤波
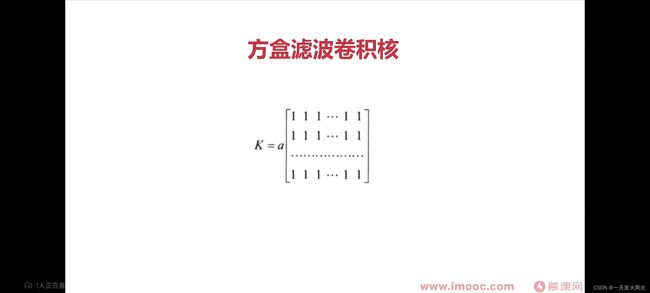
参数a的作用
方盒滤波参数 normalize
normalize = true , a= 1/(W x H)
normalize = false , a= 1
当 normalize = true时 方盒滤波==平均滤波
两个滤波的API
boxFilter(src,ddepth,ksize,anchor,normalize,borderType)
ddepth 输出位深 一般保持一致
ksize 卷积核大小
anchor 锚点 取默认值
normalize
bordeType
方盒滤波
blur(src,ksize,anchor,borderType)
平均滤波
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
#卷积核
#kernal=np.ones((5,5),np.float32)/25
img2=cv2.blur(img,(5,5))
cv2.imshow('img', img2)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果图
高斯滤波
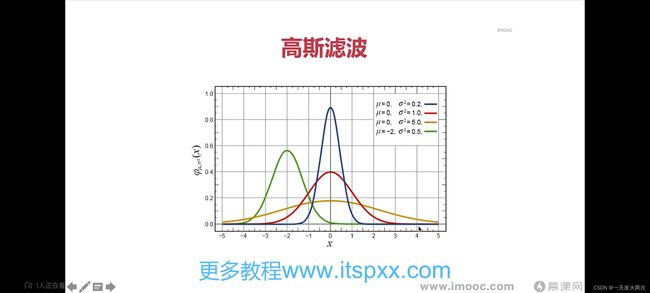


高斯滤波API
GaussianBlur(img,kernel,sigmaX,sigmaY,...)
kernel 核大小
sigmaX 重心滤波延展的宽度 x轴 到中心点的最大差距 越大越模糊
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
#卷积核
#kernal=np.ones((5,5),np.float32)/25
img2=cv2.GaussianBlur(img,(5,5),sigmaX=1)
cv2.imshow('img', img2)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果图:
高斯滤波主要解决高斯噪点。

中值滤波
假设有一个数组【1556789】,取其中的中间值作为卷积的结果值
中值滤波的优点是对胡椒噪音效果明显
 中值滤波API
中值滤波API
medianBlur(img,ksize)
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\2.png')
#5x5
img2=cv2.medianBlur(img,5)
cv2.imshow('img', img2)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果

双边滤波
可以保留边缘,同时可以对边缘内的区域进行平滑处理。
双边滤波作用就是进行美颜

双边滤波API
bilateralFilter(img,d,sigmaColor,sigmaSpace,...)
d 直径 dilter大小
sigmaColor 边缘
sigmaSpace 平面上
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
img2=cv2.bilateralFilter(img,7,20,50)
cv2.imshow('img', img2)
cv2.waitKey(0)
if __name__ == '__main__':
start()
高通滤波
- Sobel(索贝尔)(高斯)------抗噪音好-----缺点:必须将横轴和纵轴检测的边缘加在一起才能
- Scharr(沙尔)------3x3卷积核,检测的更细一点-----缺点:必须将横轴和纵轴检测的边缘加在一起才能
- Laplacian(lapulasi)-------可以将横轴纵轴一起检测-----缺点:对噪音敏感
Sobel算子
- 先向x方向求导
- 然后在y方向求导
- 最终结果:|G| = |Gx| + |Gy|
Sobel API:
Sobel(src,ddepth,dx,dy,ksize=3,scale=1,delta=0,borderType=BORDER_DEFAULT)
dx=1 就会检测y边
dy=1 就会检测x边
如果ksize=-1就变成Scharr算法
scale 缩放
delta 结果
borderType 边缘类型是什么
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
#y方向边缘
d1=cv2.Sobel(img,cv2.CV_64F,1,0,ksize=5)
d2 = cv2.Sobel(img, cv2.CV_64F, 0, 1, ksize=5)
dst=d1+d2
cv2.imshow('d1', d1)
cv2.imshow('d2', d2)
cv2.imshow('dst', dst)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:

Scharr算子
- 与Sobel类似,只不过使用的Kernel值不同
- Scharr只能求x方向或y方向边缘
ScharrAPI:
Scharr(src,ddepth,dx,dy,scale=1,delta=0,borderType=BORDER_DEFAULT)
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
d1=cv2.Scharr(img,cv2.CV_64F,1,0)
d2 = cv2.Scharr(img, cv2.CV_64F, 0, 1)
dst=d1+d2
cv2.imshow('d1', d1)
cv2.imshow('d2', d2)
cv2.imshow('dst', dst)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果图:
拉普拉斯算子Laplacian
- 可以同时求两个方向的边缘
- 对噪音敏感,一般先进行去噪再调用拉普拉斯
Laplacian API
Laplacian(img,ddepth,ksize=1,scale=1,borderType=BORDER_DEFAULT)
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
d1=cv2.Laplacian(img,cv2.CV_64F,ksize=5)
cv2.imshow('d1', d1)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果图:
边缘检测Canny
- 使用5x5高斯滤波消除噪音
- 计算图像梯度的方向(0°、45°、90°、135°)
- 取局部最大值
- 阈值计算
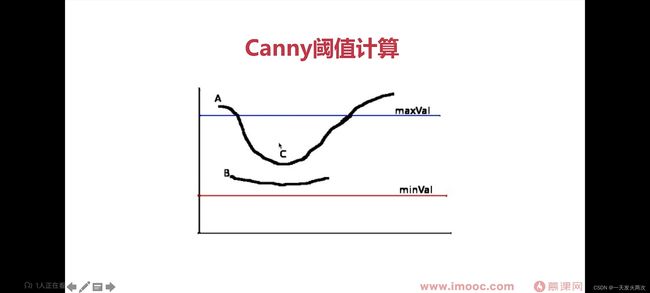
Canny API :
Canny(img,minVal,maxVal,...)
minVal最小阈值 小于最小阈值就不算边缘
maxVal最大阈值 大于最大阈值是边缘
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
d1=cv2.Canny(img,100,200)
cv2.imshow('d1', d1)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果图:

形态学图像处理
- 基于图像形态进行处理的一些基本算法
- 这些处理方法基本是对二进制图像进行处理
- 卷积核决定着图像处理后的效果
处理方法:
- 腐蚀与膨胀
- 开运算
- 闭运算
- 顶帽
- 黑帽
图像二值化
- 将图像的每个像素变成两种值,如0,255
- 全局二值化
- 局部二值化 (对光线不好的图像处理较好)
全局二值化
threshold API
threshold(img,thresh,maxVal,type)
img:图像,最好是灰度图
thresh:阈值
maxVal:超过阈值,替换成maxVal
threshodType
- THRESH_BINARY和THRESH_BINARY_INV (两个相反,一个超过阈值为最大,一个超过阈值为最小 )
- THRESH_TRUNC
- THRESH_TOZERO和THRESH_TOZERO_INV

代码:
import cv2
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
gol= cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#一个是执行结果,一个是输出图像
ret,dst=cv2.threshold(gol,180,255,cv2.THRESH_BINARY)
cv2.imshow('dst', dst)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果图:
自适应阈值
由于光照不均匀以及阴影的存在,只有一个阈值会使得在阴影处的白色被二值化成黑色
adaptiveThreshold API
adaptiveThreshold(img,maxVal,adaptiveMethod ,type,blockSize,C)
maxVal 转换成最大值是多少
adaptiveMethod:计算阈值的方法
blockSize 临近区域大小
C 常量,从计算出的平均值或加权平均值中减去
adaptiveMethod:
- 计算阈值的方法
- ADAPTIVE_THRESH_MEAN_C:计算临近区域的平均值
- ADAPTIVE_THRESH_GAUSSIAN_C :高斯窗口加权平均值 (一般用这个效果更好)
Type:二值化类型
- THRESH_BINARY
- THRESH_BINARY_INV
代码:
import cv2
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
gol= cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#一个是执行结果,一个是输出图像
dst=cv2.adaptiveThreshold(gol,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,cv2.THRESH_BINARY_INV,3,0)
cv2.imshow('dst', dst)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:
腐蚀
卷积核一般是全1的


腐蚀api
erode(img,kernel,iterations=1)
kernel卷积核大小
iterations 腐蚀次数
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
gol= cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
kernel=np.ones((3,3),np.uint8)
#一个是执行结果,一个是输出图像
dst=cv2.erode(img,kernel,iterations=1)
cv2.imshow('dst', dst)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果图:
卷积核的类型
获得卷积核
getStructuringElement(type,size)
size值为(3,3)、(5,5)...
卷积核类型
- MORPH_RECT //全一的矩形 (通常)
- MORPH_ELLIPSE //椭圆形
- MORPH_CROSS // 十字架 交叉的
代码:
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
gol= cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#kernel=np.ones((3,3),np.uint8)
kernel=cv2.getStructuringElement(cv2.MORPH_RECT,(7,7))
print(kernel)
dst=cv2.erode(img,kernel,iterations=1)
cv2.imshow('dst', dst)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:
MORPH_RECT //全一的矩形 (通常):
F:\python\Scripts\python.exe F:/pythonProject/opencvStudy/study1/start35.py
[[1 1 1 1 1 1 1]
[1 1 1 1 1 1 1]
[1 1 1 1 1 1 1]
[1 1 1 1 1 1 1]
[1 1 1 1 1 1 1]
[1 1 1 1 1 1 1]
[1 1 1 1 1 1 1]]
- MORPH_ELLIPSE //椭圆形 :
F:\python\Scripts\python.exe F:/pythonProject/opencvStudy/study1/start35.py
[[0 0 0 1 0 0 0]
[0 1 1 1 1 1 0]
[1 1 1 1 1 1 1]
[1 1 1 1 1 1 1]
[1 1 1 1 1 1 1]
[0 1 1 1 1 1 0]
[0 0 0 1 0 0 0]]
MORPH_CROSS // 十字架 交叉的:
[[0 0 0 1 0 0 0]
[0 0 0 1 0 0 0]
[0 0 0 1 0 0 0]
[1 1 1 1 1 1 1]
[0 0 0 1 0 0 0]
[0 0 0 1 0 0 0]
[0 0 0 1 0 0 0]]
膨胀运算
膨胀API:
dilate(img,kernel,iterations=1)
iterations:膨胀几次
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
gol= cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#kernel=np.ones((3,3),np.uint8)
kernel=cv2.getStructuringElement(cv2.MORPH_CROSS,(7,7))
print(kernel)
dst=cv2.dilate(img,kernel,iterations=1)
cv2.imshow('dst', dst)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:
开运算
开运算=腐蚀+膨胀
开运算API:
morphologyEx(img,MORPH_OPEN,kernel)
MORPH_OPEN 宏 代表形态学的开运算
kernel 卷积核大小。噪点大核大
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(7,7))
dst=cv2.morphologyEx(img,cv2.MORPH_OPEN,kernel)
cv2.imshow('dst', dst)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:
闭运算
闭运算=膨胀+腐蚀

闭运算API:
morphologyEX(img,MORPH_CLOSE,kernel)
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(7,7))
dst=cv2.morphologyEx(img,cv2.MORPH_CLOSE,kernel)
cv2.imshow('dst', dst)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:
形态学梯度
梯度=原图-腐蚀

梯度API:
morphologyEX(img,MORPH_GRADIENT,kernel)
边缘清晰 kernel小一点,希望里边比较粗一点 kernel大一点
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(3,3))
dst=cv2.morphologyEx(img,cv2.MORPH_GRADIENT,kernel)
cv2.imshow('dst', dst)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果图:
顶帽运算
顶帽=原图-开运算
 要小的点,不要大的
要小的点,不要大的
顶帽API
morphologyEX(img,MORPH_TOPHAT,kernel)
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(3,3))
dst=cv2.morphologyEx(img,cv2.MORPH_TOPHAT,kernel)
cv2.imshow('dst', dst)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果图:
黑帽运算
黑帽=原图-闭运算

黑帽API:
morphologyEX(img,MORPH_BLACKHAT,kernel)
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(3,3))
dst=cv2.morphologyEx(img,cv2.MORPH_BLACKHAT,kernel)
cv2.imshow('dst', dst)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果图:
图像轮廓
具有相同颜色或强度的连续点的曲线
轮廓作用:
- 可用于图形分析
- 物体的识别和检测
注意点: - 为了检测到准确性,需要先对图像进行二值化或Canny操作
- 画轮廓时会修改输入的图像
轮廓查找API
findContours(img,mode,ApproximationMode...)
mode 模式 主要作用对查找到轮廓怎样处置
ApproximationMode 近似的模式
两个返回值
contours 和hierarchy
contours 查找到所有轮廓的列表
hierarchy 所有轮廓有没有层级关系,前后关系
mode
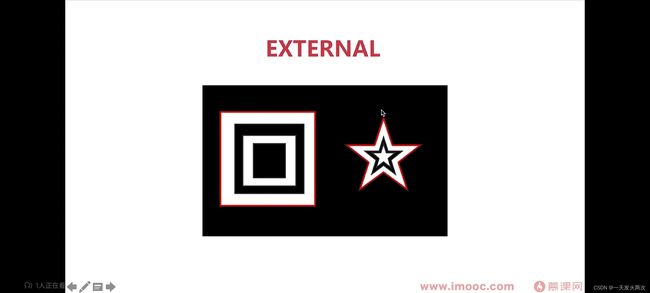
- RETR_EXTERNAL=0,表示只检测外轮廓
- RETR_LIST——1,检测的轮廓不建立等级关系
- RETR_CCOMP=2,每层最多两级
- RETR_TREE=3,按树形存储轮廓 (常用)


ApproximationMode
- CHAIN_APPROX_NONE,保存所有轮廓上的点 (数据量大)
- CHAIN_APPROX_SIMPLE,只保存角点(一般这个)
实战查找轮廓
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\VRChat\\2022-06\\vr.png')
#转换成灰度
imggray=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#二值化
dst = cv2.adaptiveThreshold(imggray,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,cv2.THRESH_BINARY_INV,3,0)
#轮廓查找
contours,hierarchy = cv2.findContours(dst,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
print(contours)
print(hierarchy)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:

绘制轮廓
绘制轮廓API:
drawContours(img, contours,contourIdx,color,thickness...)
contours:轮廓坐标点
contourIdx ,轮廓顺序号 -1表示绘制所有轮廓
color:颜色,(0,0,255)
thickness:线宽,-1是全部填充
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\3.png')
#转换成灰度
imggray=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#二值化
ret,binary = cv2.threshold(imggray,150,255,cv2.THRESH_BINARY)
#轮廓查找
contours,hierarchy = cv2.findContours(binary,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
#绘制边
cv2.drawContours(img, contours,-1,(0,0,255),5)
cv2.imshow('lines',img)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:

轮廓的面积与周长
轮廓面积API:
contourArea(contour)
contour:轮廓
轮廓周长API:
arcLength(curve,closed)
curve:轮廓
closed:是否是闭合的轮廓
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\3.png')
#转换成灰度
imggray=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#二值化
ret,binary = cv2.threshold(imggray,150,255,cv2.THRESH_BINARY)
#轮廓查找
contours,hierarchy = cv2.findContours(binary,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
#绘制边
cv2.drawContours(img, contours,-1,(0,0,255),5)
#计算面积
area = cv2.contourArea(contours[0])
#计算周长
len = cv2.arcLength(contours[0],True)
print("area=%d"%(area))
print("len=%d" % (len))
cv2.imshow('lines',img)
cv2.waitKey(0)
if __name__ == '__main__':
start()
输出:
多边形逼近与凸包

多边形逼近API
approxPolyDP(curve,epsilon,closed)
curve:轮廓
epsilon:精度
closed:是否是闭合轮廓
凸包API:
convexHull(point,clockwise,...)
points:轮廓
clockwise:顺时针绘制
代码:
import cv2
import numpy as np
def drawShape(src,points):
i=0
while i效果图:

凸包:
代码:
full = cv2.convexHull(contours[1])
drawShape(img,full)
效果图:

外接矩形
- 最小外接矩形
- 最大外接矩形

最小外接矩形API
minAreaRect(points)
points:轮廓
返回值:RotatedRect 角度
RotatedRect
- x,y
- width,height
- angle
最大外接矩形API
boundingRect(array)
array:轮廓
返回值:Rect (包括起始点,宽和高)
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\hello.png')
# 转换成灰度
imggray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 二值化
ret, binary = cv2.threshold(imggray, 210, 255, cv2.THRESH_BINARY)
# 轮廓查找
contours, hierarchy = cv2.findContours(binary, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
#最小外接矩形
r=cv2.minAreaRect(contours[1])
box= cv2.boxPoints(r) #只取起始点和宽高
#强制转换 浮点型转换为int
box=np.int0(box)
cv2.drawContours(img,[box],0,(0,225,0),2)
#最大外接矩形
x,y,w,h=cv2.boundingRect(contours[1])
cv2.rectangle(img,(x,y),(x+w,y+h),(225,0,0),2)
cv2.imshow('lines', img)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:

实战车辆统计
第一步,读取视频
import cv2
import numpy as np
def start():
#打开视频
cap= cv2.VideoCapture("C:\\Users\\Zz\\Videos\\1.mp4")
#一帧一帧读取
while True:
ret,frame =cap.read()
if ret:
#显示画面
cv2.imshow("video",frame)
key=cv2.waitKey(10)
#esc按键
if (key==27):
break
cap.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
start()
去除背景
将前景提取,去除背景
API
createBackgroundSubractorMOG(...)
history=200 #200ms是5帧
论文推荐
An improved adaptive background mixture model for real-time tracking with shadow detection
代码:
import cv2
import numpy as np
def start():
#打开视频
cap= cv2.VideoCapture("C:\\Users\\Zz\\Videos\\1.mp4")
#获取去背景对象
bgsubmog = cv2.bgsegm.createBackgroundSubtractorMOG()
#一帧一帧读取
while True:
ret,frame =cap.read()
if ret:
#灰度
cv2.cvtColor(frame,cv2.COLOR_BGR2GRAY)
#去高斯噪点
blur= cv2.GaussianBlur(frame,(3,3),5)
#取背影
mask=bgsubmog.apply(blur)
#显示画面
cv2.imshow("video",mask)
key=cv2.waitKey(10)
#esc按键
if (key==27):
break
#消除资源
cap.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
start()
效果:
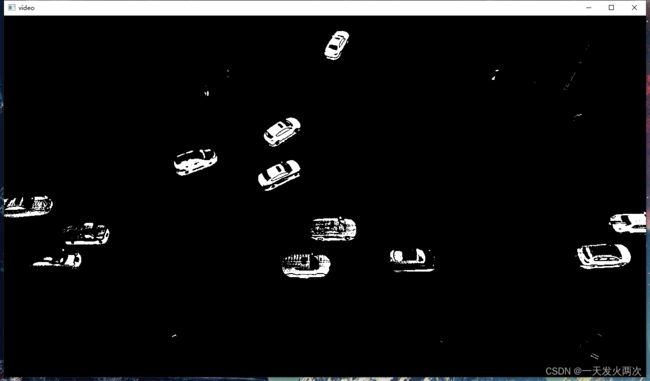
形态处理
代码:
import cv2
import numpy as np
def start():
#打开视频
cap= cv2.VideoCapture("C:\\Users\\Zz\\Videos\\1.mp4")
#获取去背景对象
bgsubmog = cv2.bgsegm.createBackgroundSubtractorMOG()
#一帧一帧读取
while True:
ret,frame =cap.read()
if ret:
#灰度
img = cv2.cvtColor(frame,cv2.COLOR_BGR2GRAY)
#去高斯噪点
blur= cv2.GaussianBlur(img,(3,3),5)
#去掉背景
mask=bgsubmog.apply(blur)
#腐蚀 去掉小的的物体
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3))
erode = cv2.erode(mask,kernel,iterations=1)
#膨胀 还原放大
dilate = cv2.dilate(erode,kernel,iterations=3)
#闭运算 去掉中间的空缺
close = cv2.morphologyEx(dilate,cv2.MORPH_CLOSE,kernel)
close = cv2.morphologyEx(dilate, cv2.MORPH_CLOSE, kernel)
#查找轮廓
contours,hierarchy = cv2.findContours(close,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
for (i,con) in enumerate(contours):
#获取最大外接矩形
(x,y,w,h)=cv2.boundingRect(con)
#绘制矩形
cv2.rectangle(frame,(x,y),(x+w,y+h),(0,0,225),2)
#显示画面
cv2.imshow("video", frame)
key=cv2.waitKey(10)
#esc按键
if (key==27):
break
#消除资源
cap.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
start()
效果:
车辆统计
代码:
import cv2
import numpy as np
min_w=30
min_h=30
#检测线的高度
line_hight = 1100
#存放车辆有效数组
cars=[]
#线的偏移量
offset=6
#求中心点
def center(x,y,w,h):
x1=int(w/2)
y1=int(h/2)
cx=x+x1
cy=y+y1
return cx,cy
def start():
# 路过车的数量
carnum = 0
#打开视频
cap= cv2.VideoCapture("C:\\Users\\Zz\\Videos\\1.mp4")
#获取去背景对象
bgsubmog = cv2.bgsegm.createBackgroundSubtractorMOG()
#一帧一帧读取
while True:
ret,frame =cap.read()
if ret:
#灰度
img = cv2.cvtColor(frame,cv2.COLOR_BGR2GRAY)
#去高斯噪点
blur= cv2.GaussianBlur(img,(3,3),5)
#去掉背景
mask=bgsubmog.apply(blur)
#腐蚀 去掉小的的物体
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3))
erode = cv2.erode(mask,kernel,iterations=1)
#膨胀 还原放大
dilate = cv2.dilate(erode,kernel,iterations=3)
#闭运算 去掉中间的空缺
close = cv2.morphologyEx(dilate,cv2.MORPH_CLOSE,kernel)
close = cv2.morphologyEx(dilate, cv2.MORPH_CLOSE, kernel)
#查找轮廓
contours,hierarchy = cv2.findContours(close,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
cv2.line(frame,(line_hight,10),(line_hight,710),(255,255,0),3)
for (i,con) in enumerate(contours):
#获取最大外接矩形
(x,y,w,h)=cv2.boundingRect(con)
#对车宽高比进行判断
#验证车是否有效
isValid=(w>=min_w) and (h >=min_h)
if(not isValid):
continue
# 绘制矩形
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 0, 225), 2)
#将有用的车中心点放入集合
cpoint = center(x,y,w,h)
cars.append(cpoint)
for(x,y) in cars:
if(x>line_hight-offset) and(x效果:
opencv特征检测
什么是特征
图像特征就是指有意义区域
具有独特性、易于识别性,比如角点、斑点以及高密度区
角点
在特征中最重要的是角点
灰度梯度的最大值对应的像素
两条线的交点
极值点(一阶导数最大,但二阶导数为0)
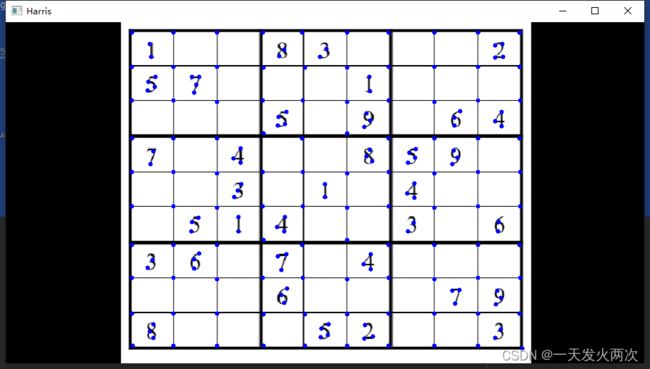
Harris 角点

- 光滑地区,无论向哪里移动,衡量系数不变
- 边缘地址,垂直边缘移动时,衡量系数变化剧烈
- 在交点处,往那个方向移动,衡量系统都变化剧烈
Harris角点检测API
cornerHarris(img,dst,blockSize,ksize,k)
dst 输出结果(python没有)
blockSize:检测窗口大小 窗口越大,检测敏感越高
ksize:Sobel的卷积核
k:权重系数,经验值,一般取 0.0.2~0.04之间
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\shudu.png')
#灰度化
grayimg=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#Harris角点检测
dst =cv2.cornerHarris(grayimg,2,3,0.04)
#Harris角点展示
img[dst>0.01*dst.max()]=[0,0,255]
cv2.imshow("Harris",img)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:

Shi-Tomasi角点检测
- Shi-Tomasi是Harris角点检测的改进
- Harris角点检测算的稳定性和k有关,而k是一个经验值,不好设定最佳值
Shi-Tomasi角点检测API
goodFeaturesTrack(img,maxCorners,...)
maxCorners:角点的最大数,值为0表示无限制
qualityLevel:小于1.0的正数,一般在0.01-0.1之间
minDistance:角之间的最小欧式距离,忽略小于此距离的点 距离越大检测的角越少
mask:感兴趣的区域
blockSize:检测窗口
useHarrisDetector:是否使用Harris算法
k:默认是0.04
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\shudu.png')
#灰度化
grayimg=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#Harris角点检测
#dst =cv2.cornerHarris(grayimg,2,3,0.04)
corner=cv2.goodFeaturesToTrack(grayimg,1000,0.01,10)
#Harris角点展示
#img[dst>0.01*dst.max()]=[0,0,255]
#浮点型转换成整型
corner =np.int0(corner)
for i in corner:
x,y=i.ravel()
cv2.circle(img,(x,y),3,(255,0,0),-1)
cv2.imshow("Harris",img)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:
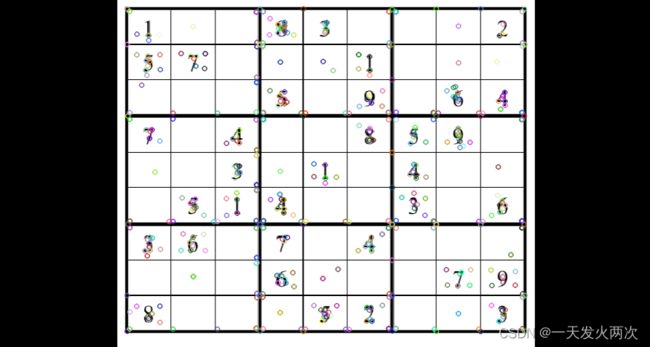
SIFT关键点检测(Scale-Invariant Feature Transform)
- Harris角点具有旋转不变的特征
- 但缩放后,原来的角有可能就不是角点了

步骤
- 创建SIFT对象
- 进行检测,kp=sift.detect(img,…)
- 绘制关键点,drawKeypoints(gray,kp,img)
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\shudu.png')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
sift=cv2.xfeatures2d.SIFT_create()
kp= sift.detect(gray,None)
#绘制点
cv2.drawKeypoints(gray,kp,img)
cv2.imshow("img",img)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:
SIFT计算描述子
关键点和描述子
- 关键点:位置、大小和方向
- 关键点描述子:记录了关键点周围对其有贡献的像素点的一组向量值,其不受仿射变换、光照变换等影响
计算描述子
kp,des=sift.compute(img,kp)- 其作用是进行特征匹配
同时计算关键点和描述
- kp,des=sift.detectAndCompute(img,…)
- mask:指明对img中哪个区域进行计算
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\shudu.png')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#创建sift对象
sift=cv2.xfeatures2d.SIFT_create()
#进行检测
kp,des= sift.detectAndCompute(gray,None)
print(des)
#绘制点
cv2.drawKeypoints(gray,kp,img)
cv2.imshow("img",img)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:
SURF (Speeded-Up Robust Features)
SIFT最大的问题是速度慢,因此才有SURF
使用步骤
surf=cv2.xfeatures2d.SURF_create()kp,des=surf.detectAndCompute(img,mask)
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\shudu.png')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#创建surf对象
surf = cv2.xfeatures2d.SURF_create()
#进行检测
kp,des= surf.detectAndCompute(gray,None)
#print(des)
#绘制点
cv2.drawKeypoints(gray,kp,img)
cv2.imshow("img",img)
cv2.waitKey(0)
if __name__ == '__main__':
start()
运行效果:
因为版权opencv4,不能使用!!!!!我超!!
ORB (Oriented FAST and Rotated BRIEF)
ORB可以做到实时检测
ORB = Oriented FAST+Rotated BRIEF
使用步骤
orb=cv2.ORB_create()kp,des=orb.detectAndCompute(img,mask)
代码:
import cv2
import numpy as np
def start():
img = cv2.imread('C:\\Users\\Zz\\Pictures\\shudu.png')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#创建ORB对象
orb=cv2.ORB_create()
#进行检测
kp,des= orb.detectAndCompute(gray,None)
#print(des)
#绘制点
cv2.drawKeypoints(gray,kp,img)
#因为版权,我超,不能用!!!!
cv2.imshow("img",img)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:

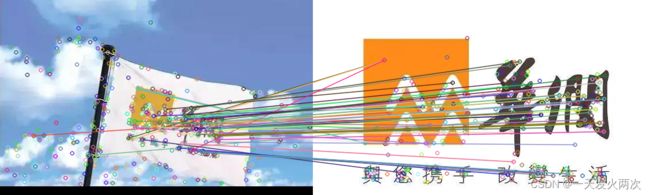
暴力特征匹配
特征匹配方法:
- BF(Brute-Force),暴力特征匹配方法
- FLANN 最快邻近区特征匹配方法
暴力特征匹配原理
它使用第一组中每个特征的描述子
与第二组中的所有特征描述子进行匹配
计算他们之间的差距,然后将最接近一个匹配返回
opencv特征匹配步骤
- 创建匹配器,BFMatcher(normType,crossCheck)
- 进行特征匹配,bf.match(des1,des2)
- 绘制匹配点,cv2.drawMatches(img1,kp1,img2,k2,…)
BFMatcher
- normType:NORM_L1,NORM_L2,HAMMING1…(默认值NORM_L2)
- crossCheck:是否进行交叉匹配,默认为false(开启了计算量大)
match方法
- 参数为SIFT、SURF、OBR等计算的描述子
- 对两幅图的描述子进行计算
drawMatches
- 搜索img,kp
- 匹配图img,kp
- match()方法返回的匹配结果
代码:
import cv2
import numpy as np
def start():
img1 = cv2.imread('C:\\Users\\Zz\\Pictures\\bf1.jpg')
img2 = cv2.imread('C:\\Users\\Zz\\Pictures\\bf2.jpg')
gray1 = cv2.cvtColor(img1,cv2.COLOR_BGR2GRAY)
gray2 = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)
# 创建sift对象
sift = cv2.xfeatures2d.SIFT_create()
#进行检测
kp1,des1= sift.detectAndCompute(gray1,None)
kp2, des2 = sift.detectAndCompute(gray2, None)
bf=cv2.BFMatcher(cv2.NORM_L1)
match= bf.match(des1,des2)
#绘制点
img3= cv2.drawMatches(img1,kp1,img2,kp2,match,None)
#print(des)
cv2.imshow("img",img3)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:

FLANN特征匹配
- 在进行批量特征匹配时,FLANN速度更快
- 由于它使用的时邻近近似值,所以精度比较差
使用FLANN特征匹配的步骤
- 创建FLANN匹配器,FLannBasedMatcher(…)
- 进行特征匹配,flann.match/knnMatch(…)
- 绘制匹配点,cv2.drawMatches/drawMatchesKnn(…)
FlannBasedMatcher
- index_params字典:匹配算法KDTREE(SIFT、SURF)、LSH(ORD)
- search——params字典:指定KDTREE算法中遍历树的次数(一般设置为5)
KDTREE
index_params=dict(algorithm=FLANN_INDEX_KDTREE,trees=5)
algorithm=FLANN_INDEX_KDTREE实际上是1
search_params
- search_params = dict(checks=50)
knnMatch方法
- 参数为SIFT、SURF、ORB等计算的描述子
- k,表示取欧式距离最近的前k个关键点
- 返回的是匹配结果DMatch对象
DMatch的内容
- distance,描述子之间的距离,值越低越好
- queryIdx,第一个图像的描述子索引值
- trainIdx,第二个图的描述子索引值
- imgIdx,第二个图的索引值
drawMatchesKnn
- 搜索img,kp
- 匹配图img,kp
- match()方法返回的匹配值
代码:
import cv2
import numpy as np
def start():
img1 = cv2.imread('C:\\Users\\Zz\\Pictures\\bf2.jpg')
img2 = cv2.imread('C:\\Users\\Zz\\Pictures\\bf1.jpg')
gray1 = cv2.cvtColor(img1,cv2.COLOR_BGR2GRAY)
gray2 = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)
# 创建sift对象
sift = cv2.xfeatures2d.SIFT_create()
#进行检测
kp1,des1= sift.detectAndCompute(gray1,None)
kp2, des2 = sift.detectAndCompute(gray2, None)
# 特征检测器
index_params = dict(algorithm=1, trees=5)
search_params = dict(checks=50)
flann= cv2.FlannBasedMatcher(index_params,search_params)
#对描述子进行匹配计算
matchs= flann.knnMatch(des1,des2,k=2)
good=[]
for i,(m,n) in enumerate(matchs):
if m.distance < 0.7*n.distance:
good.append(m)
ret = cv2.drawMatchesKnn(img1,kp1,img2,kp2,[good],None)
cv2.imshow("img",ret)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果:
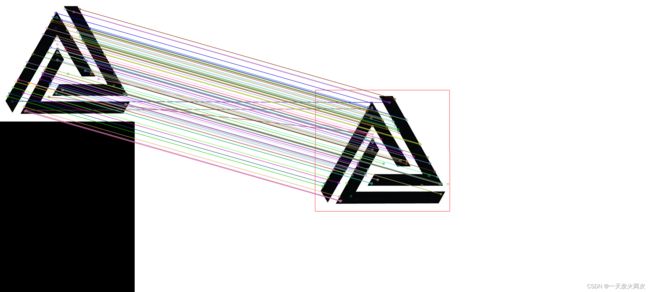
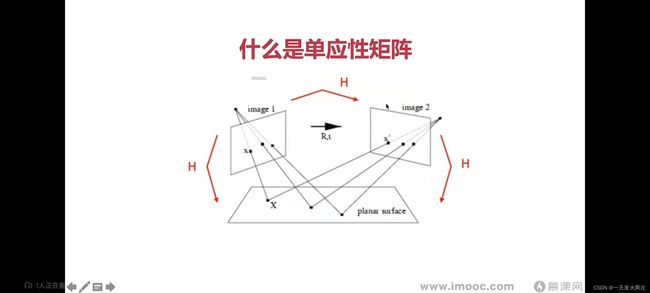
图像查找
特征匹配+单应性矩阵
 实战图像查找
实战图像查找
代码:
import cv2
import numpy as np
def start():
img1 = cv2.imread('C:\\Users\\Zz\\Pictures\\bf2.jpg')
img2 = cv2.imread('C:\\Users\\Zz\\Pictures\\bf1.jpg')
gray1 = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY)
gray2 = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)
# 创建sift对象
sift = cv2.xfeatures2d.SIFT_create()
# 进行检测
kp1, des1 = sift.detectAndCompute(gray1, None)
kp2, des2 = sift.detectAndCompute(gray2, None)
# 特征检测器
index_params = dict(algorithm=1, trees=5)
search_params = dict(checks=50)
flann = cv2.FlannBasedMatcher(index_params, search_params)
# 对描述子进行匹配计算
matchs = flann.knnMatch(des1, des2, k=2)
good = []
for i, (m, n) in enumerate(matchs):
if m.distance < 0.7 * n.distance:
good.append(m)
if len(good)>=4:
#获取匹配点
srcPts = np.float32( [kp1[m.queryIdx].pt for m in good]).reshape(-1,1,2)
dstPts = np.float32([kp2[m.trainIdx].pt for m in good]).reshape(-1, 1, 2)
#查找单元矩阵
H,_= cv2.findHomography(srcPts,dstPts,cv2.RANSAC,5.0)
#透视变换
h,w=img1.shape[:2]
pts = np.float32([[0,0],[0,h-1],[w-1,h-1],[w-1,0]]).reshape(-1,1,2)
dst=cv2.perspectiveTransform(pts,H)
cv2.polylines(img2,[np.int32(dst)],True,(0,0,255))
else:
print("the num is less than 4")
exit()
ret = cv2.drawMatchesKnn(img1, kp1, img2, kp2, [good], None)
cv2.imshow("img",ret)
cv2.waitKey(0)
if __name__ == '__main__':
start()
效果: