论文分享 | 智能放牧无人机&多旋翼无人机发展趋势
阿木推出的Prometheus项目校园赞助活动,再次迎来两位开发者参与发表论文,且分别获得了1000元、300元奖学金~
现将相关论文内容分享给大家~鼓励更多的开发者加入到我们校园赞助活动中来,只要你是使用Prometheus进行科学研究的在校生,在指定期刊发表论文就有机会获得阿木的奖学金~赶紧加入进来,下一个获得奖学金的可能就是你!
主题一:基于机载深度推理的智能放牧无人机
论文链接:Remote Sensing | Free Full-Text | Intelligent Grazing UAV Based on Airborne Depth Reasoning
The existing precision grazing technology helps to improve the utilization rate of livestock to pasture, but it is still at the level of “collectivization” and cannot provide more accurate grazing management and control. (1) Background: In recent years, with the rapid development of agent-related technologies such as deep learning, visual navigation and tracking, more and more lightweight edge computing cell target detection algorithms have been proposed. (2) Methods: In this study, the improved YOLOv5 detector combined with the extended dataset realized the accurate identification and location of domestic cattle; with the help of the kernel correlation filter (KCF) automatic tracking framework, the long-term cyclic convolution network (LRCN) was used to analyze the texture characteristics of animal fur and effectively distinguish the individual cattle. (3) Results: The intelligent UAV equipped with an AGX Xavier high-performance computing unit ran the above algorithm through edge computing and effectively realized the individual identification and positioning of cattle during the actual flight. (4) Conclusion: The UAV platform based on airborne depth reasoning is expected to help the development of smart ecological animal husbandry and provide better precision services for herdsmen.
现有的精准放牧技术有助于提高畜牧业的利用率,但仍处于“集体化”水平,无法提供更精准的放牧管理和控制。(1)背景:近年来,随着深度学习、视觉导航和跟踪等代理相关技术的飞速发展,越来越多的轻量级边缘计算单元目标检测算法被提出。(2)方法:本研究结合扩展数据集,改进的YOLOv5检测器,实现了家牛的准确识别和定位;借助核相关滤波(KCF)自动跟踪框架,利用长周期卷积网络(LRCN)分析动物皮毛的纹理特征,有效区分个体牛群。(3)结果:搭载AGX Xavier高性能计算单元的智能无人机通过边缘计算运行上述算法,在实际飞行过程中有效实现了牛的个体识别和定位。(4)结论:基于机载深度推理的无人机平台有望助力智慧生态畜牧业的发展,为牧民提供更好的精准服务。
 图1 总体工作流程
图1 总体工作流程
 图2 硬件通信架构
图2 硬件通信架构
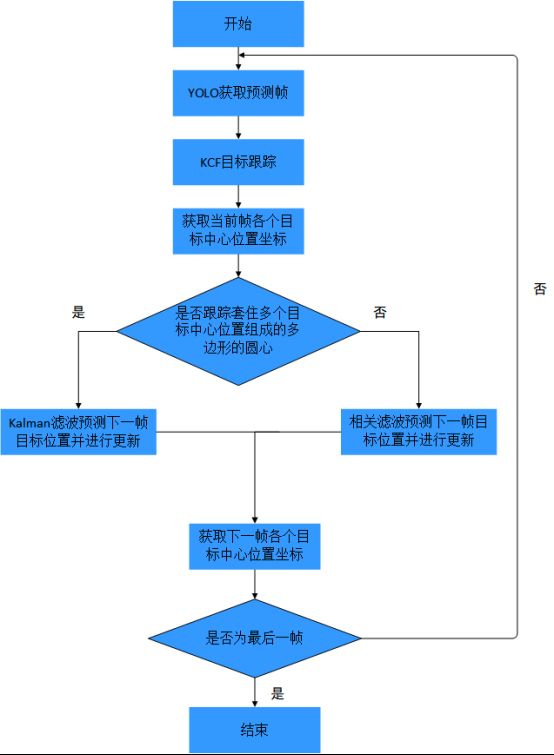 图3 多目标跟踪策略
图3 多目标跟踪策略
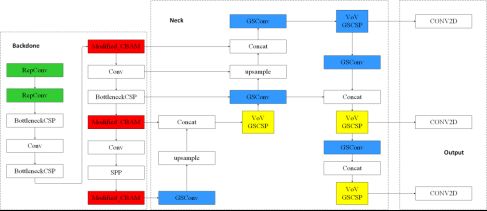 图4 改进的YOLOv5网络结构
图4 改进的YOLOv5网络结构
主题二:多旋翼无人机未来发展趋势研究
A survey of multicopter aerial vehicles by different classification methods is introduced in this paper. Firstly, the definition of the multicopterwith the difference from the helicopter is proposed. Then, the multicopters are categorized by different approaches like weight and size, number of rotors, ways of actuation, and the different flight mechanisms of multicopters are analyzed specifically. Finally, we draw two conclusions of future development trend for multicopter aerial vehicles, which is, the multicopter with high payload capacity will be both manned and unmanned vehicle.
本文介绍了通过不同分类方法对多旋翼飞行器的研究。首先,提出了多旋翼飞机的定义以及与直升机的区别。然后,通过不同的方法对多旋翼飞机进行分类,如重量和尺寸、旋翼数量、驱动方式,并具体分析了多旋翼飞机的不同飞行机制。最后,我们对多旋翼飞行器的未来发展趋势得出两个结论,即具有高载荷能力的多旋翼飞行器将是有人驾驶和无人驾驶的飞行器。
 图1 不同重量的典型多旋翼无人机
图1 不同重量的典型多旋翼无人机
 图1 不同重量的典型多旋翼无人机
图1 不同重量的典型多旋翼无人机
 图2 四旋翼的主要配置
图2 四旋翼的主要配置
 图3 四旋翼无人机的飞行机制
图3 四旋翼无人机的飞行机制