Object Track(三):经典算法复现(3)-光流法基本原理和简单实现
真的,无论多少次我还是会感叹,高翔的《SLAM十四讲》YYDS。把复杂的问题解释的很清楚。
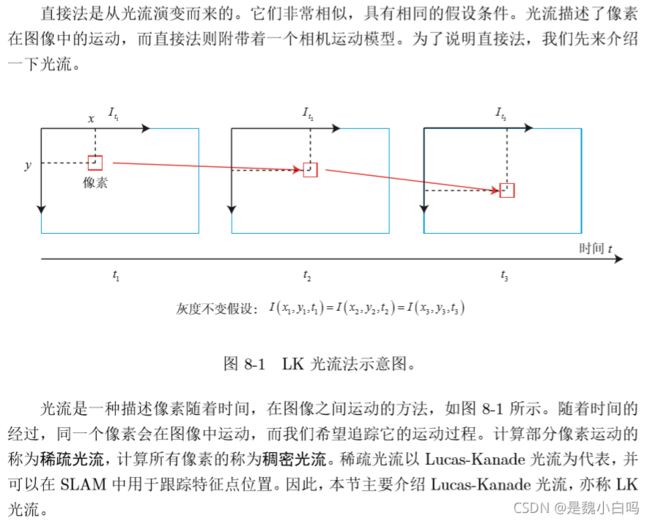
基本原理-光流定义
以下截图皆来自《SLAM十四讲》



光流的OpenCV简单实现
#!/usr/bin/env python
'''
Lucas-Kanade tracker
====================
Lucas-Kanade sparse optical flow demo. Uses goodFeaturesToTrack
for track initialization and back-tracking for match verification
between frames.
Usage
-----
lk_track.py []
Keys
----
ESC - 退出
'''
# Python 2/3 compatibility
from __future__ import print_function
import numpy as np
import cv2 as cv
import video
from common import anorm2, draw_str
lk_params = dict( winSize = (15, 15),
maxLevel = 2,
criteria = (cv.TERM_CRITERIA_EPS | cv.TERM_CRITERIA_COUNT, 10, 0.03)) # 光流跟踪参数设置
feature_params = dict( maxCorners = 500,
qualityLevel = 0.3,
minDistance = 7,
blockSize = 7 ) # 角点检测参数设置
class App: # 进入主程序
def __init__(self, video_src): # 初始化
self.track_len = 10
self.detect_interval = 5
self.tracks = []
self.cam = video.create_capture(video_src)
self.frame_idx = 0
def run(self):
while True:
_ret, frame = self.cam.read() # 打开相机
frame_gray = cv.cvtColor(frame, cv.COLOR_BGR2GRAY) # 灰度图像
vis = frame.copy()
if len(self.tracks) > 0:
img0, img1 = self.prev_gray, frame_gray
p0 = np.float32([tr[-1] for tr in self.tracks]).reshape(-1, 1, 2)
p1, _st, _err = cv.calcOpticalFlowPyrLK(img0, img1, p0, None, **lk_params) # 计算光流p1
p0r, _st, _err = cv.calcOpticalFlowPyrLK(img1, img0, p1, None, **lk_params) # 计算光流p0
d = abs(p0-p0r).reshape(-1, 2).max(-1) # 计算距离
good = d < 1
new_tracks = []
for tr, (x, y), good_flag in zip(self.tracks, p1.reshape(-1, 2), good):
if not good_flag:
continue
tr.append((x, y))
if len(tr) > self.track_len:
del tr[0]
new_tracks.append(tr)
cv.circle(vis, (int(x), int(y)), 2, (0, 255, 0), -1) # 标记光流点
self.tracks = new_tracks
cv.polylines(vis, [np.int32(tr) for tr in self.tracks], False, (0, 255, 0)) # 画出运行线条,可视化的更棒
draw_str(vis, (20, 20), 'track count: %d' % len(self.tracks))
if self.frame_idx % self.detect_interval == 0:
mask = np.zeros_like(frame_gray)
mask[:] = 255
for x, y in [np.int32(tr[-1]) for tr in self.tracks]:
cv.circle(mask, (x, y), 5, 0, -1)
p = cv.goodFeaturesToTrack(frame_gray, mask = mask, **feature_params) # 使用 goodFeaturesToTrack 进行轨道初始化和回溯以进行帧之间的匹配验证。
if p is not None:
for x, y in np.float32(p).reshape(-1, 2):
self.tracks.append([(x, y)])
self.frame_idx += 1
self.prev_gray = frame_gray
cv.imshow('lk_track', vis)
ch = cv.waitKey(1)
if ch == 27:
break
def main():
import sys
try:
video_src = sys.argv[1]
except:
video_src = 0
App(video_src).run()
print('Done')
if __name__ == '__main__':
print(__doc__)
main()
cv.destroyAllWindows()
分析一下试验效果
1.灰度假设较弱,存在跟丢现象
2.为了确定点,可以使用cv.goodFeaturesToTrack()。程序启动后选取第一帧,检测其中的一些Shi-Tomasi角点,然后使用Lucas-Kanade光流迭代地跟踪这些点。对于函数cv.calcOpticalFlowPyrLK(),我们传递前一帧,前一点和下一帧。它会返回下一个点以及一些状态码,如果找到下一个点,状态码的值为1,否则为零。我们将这些下一个点迭代地传递为下一步中的上一个点。请参见上面的代码。
3.运动的速度过快或者运行的幅度过大确实会造成追踪的丢失
4.总而言之,光流法可以加速基于特征点的视觉里程计算法,避免计算和匹配描述子的过程,但要求相机运动较慢(或采集频率较高)。