神经网络编译器TVM
市面上,关于神经网络的提速方案,可谓八仙过海各显神通
英伟达搞了tensorRT
facebook依托着pytorch也做了 libtorch c++ 的相关部署方案
谷歌在他原有的tensorflow的生态做了tensorflow c++以及tensorflow lite相关的方案
这些方案各有优劣,各有长短,不过他们有一个共有的特点,那就是推理代码,推理框架是通用的
不同的神经网络模型,都是加载到这个通用推理框架来做推理
没有做针对你专门的神经网络来做专门的比如cache命中,中间缓存,推理中间层融合等
当然通用的优化他们都做了.只是一些专用的优化
比如针对resNet有效但是对于,centerNet无效的之类优化就没有做.当然为了框架的通用性,也没法做.
TVM是一款开源项目,主要由华盛顿大学的SAMPL组贡献开发.其实是一个神经网络的编译框架
首先TVM有一个基础认识,也即是每个神经网络模型的运算其实分为两部分:
一部分是compute:也即是数学层面的东西,他就是我们平时说得 f ( w x + b ) f(wx+b) f(wx+b)这样的东西.在整个TVM神经网络编译过程中没有发生变化,也就是说精度不会损失,这也是他的优势;
另一部分是schedule: 也即是代码层面对这些数学逻辑实现的调度层面的东西,比如我的for循环如何设计,中间变量如何存储,cache命中率如何,寄存器访问如何设置.是否有两步合并做一步的更高效的操作.这些部分的实现,对于我们上面说的tensorRT,tensorflow之类他有统一的实现,不会对每个神经网络做定制.而这部分对于推理时间的影响十分的大.
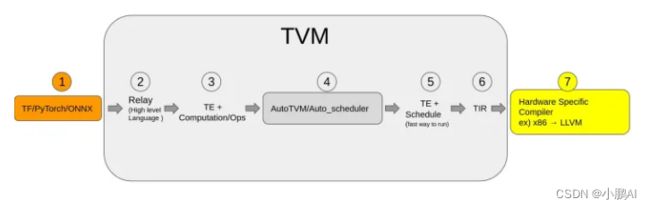
输入是已经训练好的神经网络模型,比如onnx,tensorflow,pytorch,之类.随后通过TVM这个框架自定义的算子和计算规则表达方式,把整个模型表达为relay.也就是计算原语.
得到计算原语之后,tvm框架实现了一个算子仓库,算子仓库根据计算原语,重新组装compute和schedule。形成最终的推理代码。这一步也就是神经网络的编译过程。
编译过程,可以使用tvm默认的schedule方式,也就是默认编译方式,也可以使用自动重新搜索的方式,也就是autoTVM,一般而已如果模型目前的推理时间还比较长,比如10ms的时候,使用autotvm的方法往往能取得还不错的效果。
如上面网络架构所示,tvm编译完成后,会生成目标平台的代码,比如cuda,树莓派,苹果手机,安卓手机。生成的代码就是咱们需要的推理代码啦,平台为了我们方便的使用,同时又帮我们编译成的so库,或者dll库。不同平台动态库类型不一样。
目前TVM的架构是:
1)最高层级支持主流的深度学习前端框架,包括TensorFlow,MXNet,Pytorch等。
2)Relay IR支持可微分,该层级进行图融合,数据重排等图优化操作。
3)基于tensor张量化计算图,并根据后端进行硬件原语级优化,autoTVM根据优化目标探索搜索空间,找到最优解。
4)后端支持ARM、CUDA/Metal/OpenCL、加速器VTA(Versatile Tensor Accelerator)
安装传送门:http://tvm.apache.org/docs/install/index.html
官方简介传送门:http://tvm.apache.org/docs/tutorials/index.html
什么是autoTVM
autotvm是tvm的一个子模块,使用机器学习的方法来自动搜索最优的目标硬件平台的推理代码。优点是接口简单,易于使用,在算子优化门槛高,算子优化工程师少同时市场需求巨大的背景下,通过这种自动搜索的方式,也能搜索出与手工设计优化代码相匹敌的推理代码。优化效率大大提升
典型优化方向和思路
自动优化目标函数
常见的推理schedule优化方式有 loop order , memory scope , threading ,tiling ,unrolling , vectorization 等.这里有介绍另外一个门派autoKernel 时,对这几种优化方式的详细介绍:
传送门:https://baijiahao.baidu.com/s?id=1686304642517576719&wfr=spider&for=pc
通过tvm的IR定义我们可以穷举出一个数量极其庞大的图优化和调度优化的策略。但是介于计算资源的有限性,我们不可能使用暴力的方式对他们进行搜索!

为了理解整个优化流程,我们先来看看节点的含义:
Exploration Module 是优化主流程,优化得到schedule方案和图优化方案,存入到history data ,
随后右边的Cost Model用于预测优化方案的耗时的相对关系是怎么样。
主要作用是预筛选出耗时小于history data的新候选方案。同时,CostModel的训练由最右边的ObjectFunction 指导。
剩下的Code Generator 和 HardWare Environment 不用做过多的解释。
接下来我们挨个模块进行介绍。
首先CostModel: 我们看看论文原文的一段介绍。
The features include loop structure information (e.g., memory access count and data reuse ratio) and generic annotations (e.g., vectorization, unrolling, thread binding). We use XGBoost [7], which has proven to be a strong feature-based model in past problems. Our second model is a TreeGRU[39], which recursively encodes a low-level AST into an embedding vector. We map the embedding vector to a final predicted cost using a linear layer.
总结起来就是CostModel是一个预测一批(e,s) 参数组合的推理时间的模型。
CostModel的输入是被我们搜索原始推理模型IR对应的两大类信息:结构信息和通用注释信息(不知道这样翻译是否合适)
结构信息包括:内存访问计数,内存重复利用率之类的信息
通用注释信息包括:矢量化信息,展开信息,线程信息
这两种信息通过XGBoost模型以及treeGRU模型,被编码为一个embedding矢量,随后这个矢量再连接一个全链接层,最后由全连接层回归预测我们的(e,s)参数组合最后生成的推理代码的推理时间。
当我们得到一个CostModel 之后,我们可以使用这个CostModel来预测推理时间,而不是跑一遍真实的推理,这样极大的节省了时间,
可以这样想象一下,通过tvm这个框架,我们有若干个这样的(e,s) 参数组合,如果我们挨个生成代码来搜索最优的候选参数组合,
那么显然这种方法是不可行的。现在有了这个CostModel就可以快速的预测参数最终的推理时间。
极大的扩大了我们有限计算资源下可以搜索的参数范围。
有了这个CostModel,我们还需要想办法让模型预测更加准确,CostModel的训练使用了一个相对目标函数的训练策略。
在实际使用情况也是如此,我们只需要关注耗时的相对关系,而不是绝对关系。
换一句话说就是从候选的一堆(e,s) 参数中快速找出排前面的组合,就达到了我们的目的,而不需要关注他们的绝对运行时间。
这样对于模型也更容易训练。
使用模拟退火,通过CostModel 预测参数的推理时间,并选择出比较优秀的一些候选参数。
从上一步选出来的参数组合中,向着多样性的方向进一步筛选过滤参数,多样性用以下的公式来约束:
-
从这些参数中随机选择一堆组合出来。
-
使用这一堆随机的参数,编译推理代码,运行真正的推理过程。根据以上流程的保证,这一步大概率能找到比上一轮跑的更快的参数。
-
跑过真正推理的这些参数,就相当于给CostModel 打了标签。 目标平台上的推理时间就是CostModel的标签。
-
运行完了这一步之后,整个流程就转起来了,CostModel不断地训练以及筛选出更多的候选参数,候选参数又能大概率的比上一波参数跑的更快。一轮一轮的迭代之后,我们就找到了最优的目标平台推理参数,用这个参数编译出目标平台推理代码。
截止这里理论层面的东西,就了解的差不多了,下面正式开始代码,下面是论文传送门:
论文:
https://arxiv.org/abs/1805.08166
https://arxiv.org/abs/1802.04799
使用TVM导入神经网络模型:
模型支持pytorch , tensorflow , onnx, caffe 等。我平时pytorch用的多,这里给一种pytorch的导入方式
def relay_import_from_torch(model, direct_to_mod_param=False):
# 模型输入模型是 NCHW次序,另外我在综述中看到tvm目前支持动态shape
input_shape = [1, 3, 544, 960]
input_data = torch.randn(input_shape)
# 使用随机数据,运行一次模型,记录张量运算
scripted_model = torch.jit.trace(model, input_data).eval()
input_name = "input0"
shape_list = [(input_name, input_shape)]
# 导入模型和权重
mod, params = relay.frontend.from_pytorch(scripted_model, shape_list)
if direct_to_mod_param:
return mod, params
# target = tvm.target.Target("llvm", host="llvm")
# dev = tvm.cpu(0)
# 设定目标平台和设备号,可以是其他的平台,比如ARM GPU ,苹果手机GPU等
target = tvm.target.cuda()
dev = tvm.device(str(target), 0)
with tvm.transform.PassContext(opt_level=3):
# 编译模型至目标平台,保存在lib变量中,后面可以被导出。
lib = relay.build(mod, target=target, params=params)
# 使用编译好的lib初始化 graph_executor ,后面用它来推理
tvm_model = graph_executor.GraphModule(lib["default"](dev))
return tvm_model, dev
初始化了推理需要的graph_executor,我们就来使用它进行推理吧
这里介绍另外一种,导出为so文件,然后加载so文件进行推理的方式。
使用TVM导出目标平台推理代码:
lib.export_library("centerFace_relay.so")
当然这里还没有进行schedule参数搜索,虽然相对于原始的pytorch接口也能有一定优化,但是还没有发挥最大功力。
TVM的python推理接口实践:
来,上代码。 so文件是刚才导出的推理库,也可以是后面搜索得到的推理库,等下后文介绍。
frame = cv2.imread("./ims/6.jpg")
target = tvm.target.cuda()
dev = tvm.device(str(target), 0)
lib = tvm.runtime.load_module("centerFace_relay.so")
tvm_centerPoseModel = runtime.GraphModule(lib["default"](dev))
input_tensor, img_h_new, img_w_new, scale_w, scale_h, raw_scale = centerFacePreprocess(frame)
tvm_centerPoseModel.set_input("input0", tvm.nd.array(input_tensor.astype("float32")))
for i in range(100):
# 推理速率演示,推理多次后时间会稳定下来
t0 = time.time()
tvm_centerPoseModel.run()
print("tvm inference cost: {}".format(time.time() - t0))
heatmap, scale, offset, lms = torch.tensor(tvm_centerPoseModel.get_output(0).asnumpy()), \
torch.tensor(tvm_centerPoseModel.get_output(1).asnumpy()), \
torch.tensor(tvm_centerPoseModel.get_output(2).asnumpy()), \
torch.tensor(tvm_centerPoseModel.get_output(3).asnumpy()),
dets, lms = centerFacePostProcess(heatmap, scale, offset, lms, img_h_new, img_w_new, scale_w, scale_h, raw_scale)
centerFaceWriteOut(dets, lms, frame)
这里就打通了一个完整的流程,使用tvm导入模型 —> 编译并导出so库 —> 加载so库 —> 推理
上面的编译并导出so库,在windows平台的话就是导出dll 库。
编译的过程使用tvm默认的schedule参数,也有一定的优化效果,测试下来,
之前使用了一个centerface的pytorch模型推理50W像素的图片大约需要12ms [ 1080ti ],默认编译后推理时间大约是 6ms 。
对比上面,除了使用默认的schedule参数进行推理,还可以搜索更优的schedule参数。
测试下来,相同的情况,centerface推理时间3.5ms。 又有了大约一倍的提升
对应的总体流程变成了:
使用tvm导入模型 —> 搜索最优scheduel参数 — > 编译并导出so库 —> 加载so库 —> 推理
使用autoTVM搜索最优推理代码:
python 搜索代码.
def case_autotvm_relay_centerFace():
# InitCenterFacePy封装了pytorch的 加载代码
model = InitCenterFacePy()
# tvm搜索完成后将结果保存在.log中
log_file = "centerFace.log"
dtype = "float32"
# 初始化优化器,及优化选项
tuning_option = {
"log_filename": log_file,
"tuner": "xgb",
# "n_trial": 1,
"n_trial": 2000,
"early_stopping": 600,
"measure_option": autotvm.measure_option(
builder=autotvm.LocalBuilder(timeout=10),
runner=autotvm.LocalRunner(number=20, repeat=3, timeout=4, min_repeat_ms=150),
),
}
print("Extract tasks centerFace...")
mod, params, = relay_import_from_torch(model.module.cpu(), direct_to_mod_param=True)
input_shape = [1, 3, 544, 960]
target = tvm.target.cuda()
tasks = autotvm.task.extract_from_program(
mod["main"], target=target, params=params, ops=(relay.op.get("nn.conv2d"),)
)
# run tuning tasks
print("Tuning...")
tune_tasks(tasks, **tuning_option)
# compile kernels with history best records
# 模型搜索完成后,进行耗时统计。
profile_autvm_centerFace(mod, target, params, input_shape, dtype, log_file)
TVM验证推理时间:
def profile_autvm_centerFace(mod, target, params, input_shape, dtype, log_file):
with autotvm.apply_history_best(log_file):
print("Compile...")
with tvm.transform.PassContext(opt_level=3):
lib = relay.build_module.build(mod, target=target, params=params)
# load parameters
dev = tvm.device(str(target), 0)
module = runtime.GraphModule(lib["default"](dev))
data_tvm = tvm.nd.array((np.random.uniform(size=input_shape)).astype(dtype))
module.set_input("input0", data_tvm)
# evaluate
print("Evaluate inference time cost...")
ftimer = module.module.time_evaluator("run", dev, number=1, repeat=100)
prof_res = np.array(ftimer().results) * 1000 # convert to millisecond
print(
"Mean inference time (std dev): %.2f ms (%.2f ms)"
% (np.mean(prof_res), np.std(prof_res))
)
lib.export_library("centerFace_relay.so")
TVM的c++推理接口实践
上面我们得到了一个目标平台编译好的动态库。
神经网络的部署不仅仅是推理,还有其他的代码,往往都是一些效率要求很高的场景,我们一般都使用c++作为目标平台的编码语言。
so库得到之后,我们如何使用他来推理呢
初始化部分
DLDevice dev{kDLGPU, 0};
// for windows , the suffix should be dll
mod_factory = tvm::runtime::Module::LoadFromFile(lib_path, "so");
// 通过动态库获取模型实例 gmod
gmod = mod_factory.GetFunction("default")(dev);
// 获取函数指针: 设置推理输入
set_input = gmod.GetFunction("set_input");
get_output = gmod.GetFunction("get_output");
run = gmod.GetFunction("run");
// Use the C++ API
// 输入输出的内存空间 gpu设备上
x = tvm::runtime::NDArray::Empty({1, 3, 544, 960}, DLDataType{kDLFloat, 32, 1}, dev);
heatmap_gpu = tvm::runtime::NDArray::Empty({1, 1, 136, 240}, DLDataType{kDLFloat, 32, 1}, dev);
scale_gpu = tvm::runtime::NDArray::Empty({1, 2, 136, 240}, DLDataType{kDLFloat, 32, 1}, dev);
offset_gpu = tvm::runtime::NDArray::Empty({1, 2, 136, 240}, DLDataType{kDLFloat, 32, 1}, dev);
lms_gpu = tvm::runtime::NDArray::Empty({1, 10, 136, 240}, DLDataType{kDLFloat, 32, 1}, dev);
推理部分
值得注意的是: cv::dnn::blobFromImage真是一个好用的函数,制动帮你构造好 NCHW排列的输入内存块,而且opencv还内置了openmp 加速,在树莓派,各种手机上的时候这个函数也很好用。
int h = frame.rows;
int w = frame.cols;
float img_h_new = int(ceil(h / 32) * 32);
float img_w_new = int(ceil(w / 32) * 32);
float scale_h = img_h_new / float(h);
float scale_w = img_w_new / float(w);
cv::Mat input_tensor = cv::dnn::blobFromImage(frame, 1.0, cv::Size(img_w_new, img_h_new),
cv::Scalar(0, 0, 0),
true,
false, CV_32F);
x.CopyFromBytes(input_tensor.data, 1 * 3 * 544 * 960 * sizeof(float));
set_input("input0", x);
timeval t0, t1;
gettimeofday(&t0, NULL);
run();
gettimeofday(&t1, NULL);
printf("inference cost: %f \n", t1.tv_sec - t0.tv_sec + (t1.tv_usec - t0.tv_usec) / 1000000.);
get_output(0, heatmap_gpu);
get_output(1, scale_gpu);
get_output(2, offset_gpu);
get_output(3, lms_gpu);
tvm::runtime::NDArray heatmap_cpu = heatmap_gpu.CopyTo(DLDevice{kDLCPU, 0});
tvm::runtime::NDArray scale_cpu = scale_gpu.CopyTo(DLDevice{kDLCPU, 0});
tvm::runtime::NDArray offset_cpu = offset_gpu.CopyTo(DLDevice{kDLCPU, 0});
tvm::runtime::NDArray lms_cpu = lms_gpu.CopyTo(DLDevice{kDLCPU, 0});
参考文献
- https://zhuanlan.zhihu.com/p/366913595