Jetson NX和Yolov5的那些事
Jetson NX 踩坑记录
主要记录一下最近NX的使用以及部署NX的辛酸过程。
. p t − > . o n n x − > . e n g i n e − > D e e p s t r e a m .pt->.onnx->.engine-> Deepstream .pt−>.onnx−>.engine−>Deepstream
为什么用Jetson NX
相比于Jetson nano,拥有更高的算力。并且实验室刚好有一块闲置的Jetson NX。并且,Jetson NX支持INT8的浮点计算,Jetson nano只支持float16的浮点计算。
下面是一些Jetson系列的对比图



NX的配置
我是用学长配置好的NX,并不是自己配置的,所以一开始没有自己去镜像烧录。
个人建议直接去NVIDIA上找教程,然后进行镜像烧录。
开发板ARM与电脑X64的区别
区别大了,呜呜。环境配置完全不一样,不一样就算了,还很难配。
-
包管理器:
- 开发板上使用的包管理器叫minifoege
- 我使用的NX上并没有安装包管理器,是直接安装Python,通过软连接的方式选择环境。
-
包的安装:
-
有些包并不是用过pip直接下载的,例如pytorch:
在运行的时候显示找不到cuda,去pytorch.org上找命令,下载的时候显示找不到相关version。直接把我看傻,官网出bug???试了好几次还是不行,不死心,在官网的issue上找到了一个老哥跟我情况一毛一样。他说,他是在jetson nano上进行的。我直接好家伙,都是jetson,当然还有一个小插曲,就是指定官网下载URL的时候报错说平台不支持,那不就是平台的锅了!!
我直接搜NX安装torch,发现真的需要其他的安装方式才行(101条消息) NVIDIA Jetson Xavier NX安装torch和torchvision_星空-CSDN博客_jetson torchvision。
-
模型部署
部署是模型落地的最后一步,也是最重要的一环。
模型部署,听上去很高大上,但是实际上就是把深度学习的算法在开发板上运行起来。至于深度学习的模型,你管它是.pt,.pth,.onnx,.engine啥的,只要run起来就算部署了。
那么问题来了,为什么会出现那么多模型推理框架呢?
因为移动端(开发板)的算力有限,模型推理转化就是为了让模型更加轻量(运行推理的更快)
推理框架
推理较为简单的推理方法多是各大厂商为了适配自己的产品推出的,如Intel的OpenVINO、ARM的ARM NN、Nvidia的TensorRT,腾讯的NCNN等。
TVM:带来的加速效果非常的可观,对硬件的支持非常宽泛, 但是对新手不友好, 需要熟练掌握算法输入输出结构,并且熟知TVM API函数的情况下,可以使用TVM对算法进行加速,否则项目周期会变得不可控.
OpenVino(Intel):对新手友好,但对部署的硬件有一定的要求,如果算法可以在intel-cpu、神经网络加速棒(Stick 2)上部署,那么OpenVino是一个不错选择.
TNN:对新手友好,单纯使用TNN加速带来的加速效果一般,可以按照TNN的文档对算法进行一次优化;在编译时可以选择openvino、TensorRT编译选项,对硬件的支持就宽泛.
NCNN:加速PC端加速效果并不理想,手机端的使用比较多一些
但这些框架在实际应用场景中会遇到不少问题:
- 厂商推理框架对主流训练框架产生的模型的算子种类支持不全,导致部分模型无法部署
- 模型部署侧的开发人员需要针对不同的硬件编写不同的框架代码,花精力关注不同框架对算子的支持差异和性能差异等
因此,一套可以让我们在任意硬件上高效运行任意模型的统一框架就显得尤其有价值。
而TVM正是这样一套框架。但是可能是我孤陋寡闻,没怎么听说TVM。
TVM:深度学习模型编译框架TVM概述 - 知乎 (zhihu.com)
ONNX(Open Neural Network Exchange )还是听过的吧,一个开放的生态系统,是一种深度模型的开放格式,它使 AI 开发人员能够随着项目的发展选择合适的工具,增强模型的交互性。ONNX 得到广泛支持,可以在许多框架、工具和硬件中找到,实现不同框架之间的互操作性并简化从研究到生产的路径,也就是说不同框架(TensorFlow/Pytorch/Paddle)训练出来的模型都可以转换成onnx模型进行存储以后后续的推理。
ONNX可以用来做为推理转化的中间桥梁。
TensorRT
使用Jetson NX,当然使用自家的TensorRT推理。
TensorRT的功能
TensorRT有如下五个功能:
-
量化
- 大多数深度学习框架以全 32 位精度 (FP32) 训练神经网络。一旦模型经过完全训练,推理计算就可以使用半精度 FP16 甚至 INT8 张量运算,因为推理不需要梯度反向传播。使用较低的精度会导致更小的模型尺寸、更低的内存利用率和延迟以及更高的吞吐量。
-
自动核调整
- 在优化阶段,TensorRT 还会从数百个专用内核中进行选择,其中许多内核针对一系列参数和目标平台进行了手动调整和优化。例如,有几种不同的算法可以进行卷积。TensorRT 将从为目标 GPU、输入数据大小、过滤器大小、张量布局、批量大小和其他参数提供最佳性能的内核库中选择实现。这确保部署的模型针对特定的部署平台进行性能调整以及正在部署的特定神经网络。
-
消除冗余层
- layers whose outputs are not used and operations which are equivalent to no-op.
按我的理解,消除冗余层就是将多层进行合并,优化。之前我也见过将conv+relu+bn合成一个为操作的数学推导,也有见过用一个线性函数去表示一堆线性的操作。
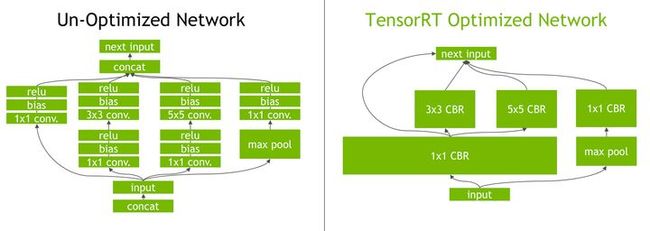
图1.TensorRT 的垂直和水平层融合和层消除优化简化了 GoogLeNet Inception 模块图,减少了计算和内存开销。
- 动态张量记忆
- TensorRT 还通过仅为每个张量在其使用期间指定内存来减少内存占用并提高内存重用率,从而避免内存分配开销以实现快速高效的执行。
TensorRT的使用
-
Build
-
构建阶段需要在目标部署GPU平台上运行。如果您的应用程序要在 Jetson TX2 上运行,则需要在 Jetson TX2 上执行构建,
-
我们使用 TensorRT 来解析经过训练的模型,并针对目标部署 GPU 的指定参数(例如批量大小、精度和工作空间内存)执行优化。这一步的输出是一个优化的推理执行引擎,我们将磁盘上的文件序列化为plan file计划文件.
plan file:计划文件包括运行时引擎用于执行网络的序列化数据。之所以称为计划文件,是因为它不仅包括权重,还包括内核执行网络的时间表。它还包括应用程序可以查询的有关网络的信息,以确定如何绑定输入和输出缓冲区。
-
-
Deploy
- 我们加载并反序列化保存的计划文件以创建 TensorRT 引擎对象,并使用它对目标部署平台上的新数据进行推理。

[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-LuC5ow4h-1650705963190)(C:\Users\BlackFriday\AppData\Roaming\Typora\typora-user-images\image-20211125123422839.png)]
听着是不是很懵逼,啥序列化,反序列化。反正我当时人都看麻了。
要花钱买的视频:YOLOv5的Jetson Nano部署 - 网易云课堂 (163.com)
Process
通过一番探索,一共发现三种方式:
- . p t − > . w t s − > . e n g i n e .pt->.wts->.engine .pt−>.wts−>.engine
- . p t − > . o n n x − > e n g i n e .pt-> .onnx->engine .pt−>.onnx−>engine
- Deepstream
法一
直接根据TensorRT官方GitHub教程wang-xinyu/tensorrtx: Implementation of popular deep learning networks with TensorRT network definition API (github.com)来,注意版本对应。通过查看,我发现在转成.engine的过程中,是采用源码编译的方式进行,也就是说需要相关的网络结构文件。重点是要C++的网络结构文件,通过.wts进行cmake生成,这我就麻了啊,我用的是别人改进的YOLOV5-Lite,根本没有相关的C++文件。
法二
运气不错,通过搜索,发现竟然有好几种转.engine的方式,其中一种就是通过Jetson自带的trtexec可以把.onnx转化为.engine。
onnx模型提取
git clone https://github.com/ppogg/YOLOv5-Lite.git
python models/export.py --weights weights/yolov5-lite.pt --img 640 --batch 1
python -m onnxsim weights/yolov5-lite.onnx weights/yolov5-lite-sim.onnx
engine 转化
/usr/src/tensorrt/bin/trtexec --onnx=input.onnx --saveEngine=out.engine --fp16 --workspace=1024
参数含义:
/usr/src/tensorrt/bin/trtexec: 你的tensorrt的地址
–onnx: 需要转换的onnx模型路径
–saveEngine: 保存的模型地址名称
–fp16: 保存出的模型的精度
–workspace: 运行空间大小(貌似没卵用)
结果转化成功了,好耶ヾ(✿゚▽゚)ノ。
然后就开始找要怎么运行.engine文件。最终在TensorRT的yolov5仓库中发现了yolov_trt.py,但是运行这个文件需要.engine以及.io文件,但是采用法二似乎没有生成什么.so的编译文件,通过cmake得到的还会生成.so文件。。。不是很懂。
参考:
(101条消息) onnx 转 trt 并使用trt模型推理_嘿,不许笑的博客-CSDN博客_onnx模型转trt
复制的文档:(101条消息) TensorRT trtexec的用法说明_冬日and暖阳的博客-CSDN博客_trtexec
法三
也就是我在愁的时候,发现还有Deepstream这个东东,这个是NVIDIM研发的SDK,用于构建智能的视频流读取,建立深度学习部署的pipline。
是通过配置一个对应的txt文件运行。打算尝试一下,后面发现还是需要.so动态编译库,寄!
考虑到Deepstream的部署也需要make,所以打算使用Yolov5s,于是进行\remake。通过配置Deepstream的过程,发现Deepstream也可以自动生成.engine
DeepStream
这真是一个让你又爱又恨的玩意儿呢。。。
安装配置
建议先找一个别人写的教程,然后配合官网教程(主)使用。
Quickstart Guide — DeepStream 6.0 Release documentation (nvidia.com)
一定要注意好对应的版本环境!!!!!!
升级JetPack的教程,官网上也有:(101条消息) NVIDIA Jetson Xavier NX升级JetPack 4.4至4.6.1_jch_wang的博客-CSDN博客
运行
Deepstream有相关的example,可以尝试运行一下。
通过Deepstream运行Yolov5,可以直接搜索,找相关的教程以及GitHub仓库。
一定要注意好对应的版本环境:
- Deepstream
- TensorRT
- Yolov5的版本
坑
-
运行的时候一定要按教程的步骤来,不要跳步(这里的跳步不是指忘记做某个步骤,例如,移动文件再make,你先make再移动文件)
- 如果改动了什么配置,也需要重新make文件(清楚make:make clean)
-
运行deepstream-app有两种方式:
-
自己转的.engine
export LD_PRELOAD=./libmyplugins.so # 添加上动态编译库
sudo deepstream-app -c deepstream_app_config_yoloV5.txt -
Deepstream转的engine
deepstream-app -c deepstream_app_config_yoloV5.txt
-
-
INT8量化,需要对应的校准图片。我也开始不知道放在哪里,出现报错之后在issue里搜索。
-
Yolov5的版本,我当时使用的是Yolov5 v6.1版,我看介绍是支持tensorRT的,但是就是死活运行不起来。经历各种磨难,发现用v6.0就可以成功。。。
python调用Deepstream
Deepstream是C++,那么我们怎么通过模型与完成相关的后续任务呢?
Deepstream5.0之后就实现的Python的接口编写:
NVIDIA-AI-IOT/deepstream_python_apps: DeepStream SDK Python bindings and sample applications (github.com)
运行这些example也需要环境配置(具体看官网),该仓库实现了许多Deepstream进行目标检测的Python example,在他们的基础上进行修改。
- deepstream-test1 – 4-class object detection pipeline
- deepstream-test2 – 4-class object detection, tracking and attribute classification pipeline
- deepstream-test3 – multi-stream pipeline performing 4-class object detection
- deepstream-test4 – msgbroker for sending analytics results to the cloud
- deepstream-imagedata-multistream – multi-stream pipeline with access to image buffers
- deepstream-ssd-parser – SSD model inference via Triton server with output parsing in Python
- deepstream-test1-usbcam – deepstream-test1 pipelien with USB camera input
- deepstream-test1-rtsp-out – deepstream-test1 pipeline with RTSP output
- deepstream-opticalflow – optical flow and visualization pipeline with flow vectors returned in NumPy array
- deepstream-segmentation – segmentation and visualization pipeline with segmentation mask returned in NumPy array
- deepstream-nvdsanalytics – multistream pipeline with analytics plugin
- runtime_source_add_delete – add/delete source streams at runtime
- deepstream-imagedata-multistream-redaction – multi-stream pipeline with face detection and redaction
- deepstream-rtsp-in-rtsp-out – multi-stream pipeline with RTSP input/output
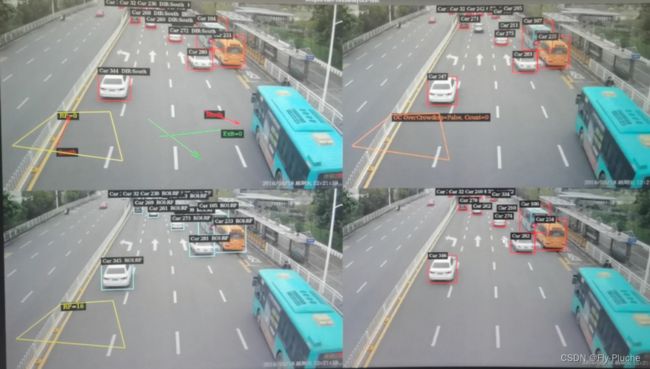
使用NVIDIA自带的检测模型以及跟踪模型NvDCF同时跑四路视频(一帧感觉会卡0.5s),跑一路视频(摄像头)可以达到实时检测的效果。
Experience
- 现身说法,论英语的重要性
- 官网教程以及官方GitHub仓库是个好东西,上面多会有教程。就我个人来看,尤其是GitHub的教程简洁明了,特别适合我这种菜鸡。
- 在运行刚clone下来的库以及配置开发板出bug时候,找issue也许可以更快的解决。
- 无论做啥都要做好环境管理,注意版本要求!!!
- 在项目搜索能力很重要,可以帮你找到许多现成优秀的baseline,无论干啥,好的基点才能让你有更好的上升空间。
- Vim的使用
- 学会看clone下来的文件夹里有些什么东西