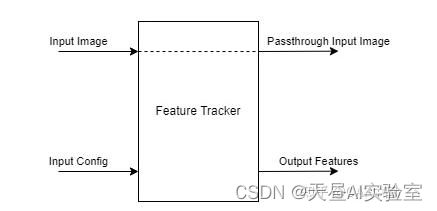
47、OAK测试FeatureTracker节点和ImageManip节点
基本思想:继续学习oak的例子和硬件模块
cmakelists.txt
cmake_minimum_required(VERSION 3.16)
project(depthai)
set(CMAKE_CXX_STANDARD 11)
find_package(OpenCV REQUIRED)
#message(STATUS ${OpenCV_INCLUDE_DIRS})
#添加头文件
include_directories(${OpenCV_INCLUDE_DIRS})
include_directories(${CMAKE_SOURCE_DIR}/include)
include_directories(${CMAKE_SOURCE_DIR}/include/utility)
#链接Opencv库
find_package(depthai CONFIG REQUIRED)
add_executable(depthai main.cpp include/utility/utility.cpp)
target_link_libraries(depthai ${OpenCV_LIBS} depthai::opencv)main.cpp
#include
#include "utility.hpp"
#include "depthai/depthai.hpp"
int main(int argc, char** argv) {
dai::Pipeline pipeline;
//定义相机
auto camRgb=pipeline.create();
camRgb->setBoardSocket(dai::CameraBoardSocket::RGB);
camRgb->setResolution(dai::ColorCameraProperties::SensorResolution::THE_1080_P);
auto config=pipeline.create();
config->setStreamName("config");
auto edge=pipeline.create();
edge->setMaxOutputFrameSize(camRgb->getVideoWidth() * camRgb->getVideoHeight());
//
//定义输出
auto xlinkoutfeatureOut=pipeline.create();
xlinkoutfeatureOut->setStreamName("outfeature");
auto xlinkoutpassthroghOut=pipeline.create();
xlinkoutpassthroghOut->setStreamName("passthrogh");
//相机和输出链接
camRgb->video.link(edge->inputImage);
config->out.link(edge->inputConfig);
edge->outputImage.link(xlinkoutfeatureOut->input);
edge->passthroughInputImage.link(xlinkoutpassthroghOut->input);
//结构推送相机
dai::Device device(pipeline);
//取帧显示
auto outqueue=device.getOutputQueue("outfeature",8, false);//maxsize 代表缓冲数据
auto passthroughqueue=device.getOutputQueue("passthrogh",8, false);//maxsize 代表缓冲数据
while(1){
auto outframe=outqueue->get();
auto outimage=outframe->getCvFrame();
cv::imshow("outimage",outimage);
auto passframe=passthroughqueue->get();
auto passimage=passframe->getCvFrame();
cv::imshow("passimage",passimage);
cv::imwrite("outimage.jpg",outimage);
cv::imwrite("passimage.jpg",passimage);
cv::waitKey(1);
}
return 0;
} 测试结果
设置配置cfg
#include
#include "utility.hpp"
#include "depthai/depthai.hpp"
int main(int argc, char** argv) {
dai::Pipeline pipeline;
//定义相机
auto Mono=pipeline.create();
Mono->setBoardSocket(dai::CameraBoardSocket::RGB);
Mono->setResolution(dai::ColorCameraProperties::SensorResolution::THE_1080_P);
auto config=pipeline.create();
config->setStreamName("config");
auto edge=pipeline.create();
edge->setMaxOutputFrameSize(Mono->getResolutionWidth() * Mono->getResolutionHeight());
//
//定义输出
auto xlinkoutfeatureOut=pipeline.create();
xlinkoutfeatureOut->setStreamName("outfeature");
auto xlinkoutpassthroghOut=pipeline.create();
xlinkoutpassthroghOut->setStreamName("passthrogh");
//相机和输出链接
Mono->video.link(edge->inputImage);
config->out.link(edge->inputConfig);
edge->outputImage.link(xlinkoutfeatureOut->input);
edge->passthroughInputImage.link(xlinkoutpassthroghOut->input);
//结构推送相机
dai::Device device(pipeline);
//取帧显示
auto outqueue=device.getOutputQueue("outfeature",8, false);//maxsize 代表缓冲数据
auto passthroughqueue=device.getOutputQueue("passthrogh",8, false);//maxsize 代表缓冲数据
auto cfgghqueue=device.getInputQueue("config");//maxsize 代表缓冲数据
dai::EdgeDetectorConfig cfg;
std::vector> sobelHorizontalKernel = {{1, 0, -1}, {2, 0, -2}, {1, 0, -1}};
std::vector> sobelVerticalKernel = {{1, 2, 1}, {0, 0, 0}, {-1, -2, -1}};
cfg.setSobelFilterKernels(sobelHorizontalKernel, sobelVerticalKernel);
cfgghqueue->send(cfg);
while(1){
auto outframe=outqueue->get();
auto outimage=outframe->getCvFrame();
cv::imshow("outimage",outimage);
auto passframe=passthroughqueue->get();
auto passimage=passframe->getCvFrame();
cv::imshow("passimage",passimage);
cv::imwrite("outimage.jpg",outimage);
cv::imwrite("passimage.jpg",passimage);
cv::waitKey(1);
}
return 0;
} 测试结果
二、ImageManip节点
cmakelists.txt
cmake_minimum_required(VERSION 3.16)
project(depthai)
set(CMAKE_CXX_STANDARD 11)
find_package(OpenCV REQUIRED)
#message(STATUS ${OpenCV_INCLUDE_DIRS})
#添加头文件
include_directories(${OpenCV_INCLUDE_DIRS})
include_directories(${CMAKE_SOURCE_DIR}/include)
include_directories(${CMAKE_SOURCE_DIR}/include/utility)
#链接Opencv库
find_package(depthai CONFIG REQUIRED)
add_executable(depthai main.cpp include/utility/utility.cpp)
target_link_libraries(depthai ${OpenCV_LIBS} depthai::opencv)main.cpp
#include
#include "utility.hpp"
#include "depthai/depthai.hpp"
int main(int argc, char** argv) {
dai::Pipeline pipeline;
//定义相机
auto rgb=pipeline.create();
rgb->setBoardSocket(dai::CameraBoardSocket::RGB);
rgb->setPreviewSize(rgb->getResolutionWidth(),rgb->getResolutionHeight());
rgb->setResolution(dai::ColorCameraProperties::SensorResolution::THE_1080_P);
auto config=pipeline.create();
config->setStreamName("config");
auto Man=pipeline.create();
Man->setMaxOutputFrameSize(3*rgb->getResolutionWidth() * rgb->getResolutionHeight());//无额少取通道数
//
//定义输出
auto xlinkoutpreviewOut=pipeline.create();
xlinkoutpreviewOut->setStreamName("preview");
//相机和输出链接
rgb->preview.link(Man->inputImage);
config->out.link(Man->inputConfig);
Man->out.link(xlinkoutpreviewOut->input);
//结构推送相机
dai::Device device(pipeline);
//取帧显示
auto outqueue=device.getOutputQueue("preview",8, false);//maxsize 代表缓冲数据
auto cfgghqueue=device.getInputQueue("config");//maxsize 代表缓冲数据
dai::ImageManipConfig cfg;
cfg.setResize(800,800);
cfg.setHorizontalFlip(1);
cfgghqueue->send(cfg);
while(1){
auto outframe=outqueue->get();
auto outimage=outframe->getCvFrame();
cv::imshow("outimage",outimage);
cv::imwrite("outimage.jpg",outimage);
cv::waitKey(1);
}
return 0;
} 测试结果

参考:
OpenCV CEO教你用OAK(四):创建复杂的管道 - 知乎