A*算法详解一看就懂(python)
定义
A*算法,A*(A-Star)算法是一种静态路网中求解最短路径最有效的直接搜索方法,也是解决许多搜索问题的有效算法。算法中的距离估算值与实际值越接近,最终搜索速度越快。
定义解析
- A*算法是一个“搜索算法”,实质上是广度优先搜索算法(BFS)的优化。从起点开始,首先遍历起点周围邻近的点,然后再遍历已经遍历过的点邻近的点,逐步的向外扩散,直到找到终点。
- A*算法的作用是“求解最短路径”,如在一张有障碍物的图上移动到目标点,以及八数码问题(从一个状态到另一个状态的最短途径)
- A*算法的思路类似图的Dijkstra算法,采用贪心的策略,即“若A到C的最短路径经过B,则A到B的那一段必须取最短”,找出起点到每个可能到达的点的最短路径并记录。
- A*算法与Dijkstra算法的不同之处在于,A*算法是一个“启发式”算法,它已经有了一些我们告诉它的先验知识,如“朝着终点的方向走更可能走到”。它不仅关注已走过的路径,还会对未走过的点或状态进行预测。因此A*算法相交与Dijkstra而言调整了进行BFS的顺序,少搜索了哪些“不太可能经过的点”,更快地找到目标点的最短路径。另外一点,由于H选取的不同,A*算法找到的路径可能并不是最短的,但是牺牲准确率带来的是效率的提升。
例子问题描述
举两个有代表性的例子,以便读者更形象化地理解A*算法
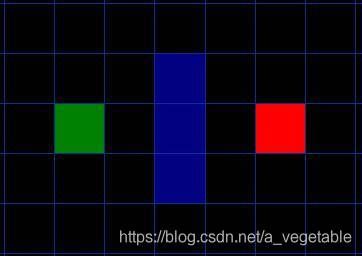
最短路径
中间蓝色是障碍物,求从绿色到红色的最短路径
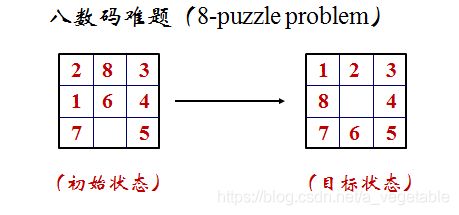
八数码
在九宫格里放在1到8共8个数字还有一个是空格,与空格相邻的数字可以移动到空格的位置,问给定的状态最少需要几步能到达目标状态(用0表示空格):
关键内容——启发函数
计算出组成路径的方格的关键是下面这个等式(启发函数):
![]()
这里,
G = 从起点 A 移动到指定方格的移动代价,沿着到达该方格而生成的路径。
H = 从指定的方格移动到终点 B 的估算成本。这个通常被称为试探法,有点让人混淆。为什么这么叫呢,因为这是个猜测。直到我们找到了路径我们才会知道真正的距离,因为途中有各种各样的东西 ( 比如墙壁,水等 ) 。
G来源于已知点信息,H来源于对未知点信息的估计,F为选择下一个将遍历节点的依据。
此外,H还有一个特征:
- 在极端情况下,当启发函数h(n)始终为0,则将由g(n)决定节点的优先级,此时算法就退化成了Dijkstra算法。
- 如果h(n)始终小于等于节点n到终点的代价,则A*算法保证一定能够找到最短路径。但是当h(n)的值越小,算法将遍历越多的节点,也就导致算法越慢。
- 如果h(n)完全等于节点n到终点的代价,则A*算法将找到最佳路径,并且速度很快。可惜的是,并非所有场景下都能做到这一点。因为在没有达到终点之前,我们很难确切算出距离终点还有多远。
- 如果h(n)的值比节点n到终点的代价要大,则A*算法不能保证找到最短路径,不过此时会很快。
- 在另外一个极端情况下,如果h()n相较于g(n)大很多,则此时只有h(n)产生效果,这也就变成了最佳优先搜索。
由上面这些信息我们可以知道,通过调节启发函数我们可以控制算法的速度和精确度。因为在一些情况,我们可能未必需要最短路径,而是希望能够尽快找到一个路径即可。这也是A*算法比较灵活的地方。
对于网格形式的图,有以下这些启发函数可以使用:
- 如果图形中只允许朝上下左右四个方向移动,则可以使用曼哈顿距离(Manhattan distance)。计算从当前万格横可或纵回移动到达目标所经过的方格数。
- 如果图形中允许朝八个方向移动,则可以使用对角距离。横纵移动和对角移动都是合法的。为提高效率,常取整数作系数10,14.
- 如果图形中允许朝任何方向移动,则可以使用欧几里得距离(Euclidean distance)。两点直线距离。
GitHub代码
https://github.com/while-TuRe/A-star-ShortestPath(用vscode即可运行)
算法思路
开始搜索(Starting the Search)
一旦我们把搜寻区域简化为一组可以量化的节点后,就像上面做的一样,我们下一步要做的便是查找最短路径。在 A* 中,我们从起点开始,检查其相邻的方格,然后向四周扩展,直至找到目标。
我们这样开始我们的寻路旅途:
1. 从起点 A 开始,并把它就加入到一个由方格组成的 open list( 开放列表 ) 中。这个 open list 有点像是一个购物单。当然现在 open list 里只有一项,它就是起点 A ,后面会慢慢加入更多的项。 Open list 里的格子都是下一步可以到达的(当然可能是退回某点后下一步到达),在最终最短路径中,open list中的格子可能会是沿途经过的,也有可能不经过。基本上 open list 是一个待检查的方格列表。
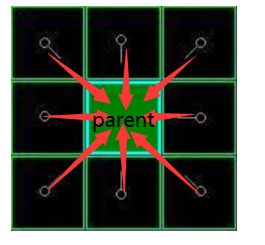
2. 查看与起点 A 相邻的方格 ( 忽略其中墙壁所占领的方格,河流所占领的方格及其他非法地形占领的方格 ) ,把其中可走的 (walkable) 或可到达的 (reachable) 方格也加入到 open list 中。把起点 A 设置为这些方格的父亲 (parent node 或 parent square) 。当我们在追踪路径时,这些父节点的内容是很重要的。因为它记录了从起点到该点的最短路径上经过的最后一个节点。
3. 把 A 从 open list 中移除,加入到 close list( 封闭列表 ) 中, close list 中的每个方格都是现在不需要再关注的。
4. 下一步,我们需要从 open list 中选一个方格,重复23步骤。但是到底选择哪个方格好呢?具有最小 F 值的那个。
所以,我们的路径是这么产生的:反复遍历 open list ,选择 F 值最小的方格,产生新的可供选择的方格,直到找到终点方格。这个过程稍后在“继续搜索”详细描述。我们还是先看看怎么去计算上面的等式。
计算启发函数
如上所述, G 是从起点A移动到指定方格的移动代价。H是从指定方格移动到终点的估计代价。
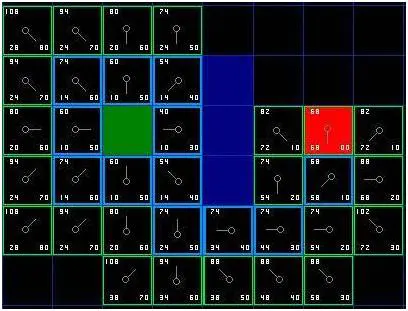
G的计算思路类似图的Dijkstra算法,采用贪心的策略,即“若A到C的最短路径经过B,则A到B的那一段必须取最短”,找出起点到每个可能到达的点的最短路径并记录。既然我们是沿着到达指定方格的路径来计算 G 值,那么计算出该方格的 G 值的方法就是找出其父亲的 G 值,然后按父亲是直线方向还是斜线方向加上 10 或 14 。在本例中,横向和纵向的移动代价为 10 ,对角线的移动代价为 14 。之所以使用这些数据,是因为实际的对角移动距离是 2 的平方根,或者是近似的 1.414 倍的横向或纵向移动代价。使用 10 和 14 就是为了简单起见。比例是对的,我们避免了开放和小数的计算。这并不是我们没有这个能力或是不喜欢数学。使用这些数字也可以使计算机更快。稍后你便会发现,如果不使用这些技巧,寻路算法将很慢。
有很多方法可以估算 H 值。这里我们使用 Manhattan 方法,计算从当前方格横向或纵向移动到达目标所经过的方格数,忽略对角移动,然后把总数乘以 10 。之所以叫做 Manhattan 方法,是因为这很像统计从一个地点到另一个地点所穿过的街区数,而你不能斜向穿过街区。重要的是,计算 H 是,要忽略路径中的障碍物。这是对剩余距离的估算值,而不是实际值,因此才称为试探法。
把 G 和 H 相加便得到 F 。我们第一步的结果如下图所示。每个方格都标上了 F , G , H 的值,就像起点右边的方格那样,左上角是 F ,左下角是 G ,右下角是 H 。
继续搜索(Continuing the Search)
为了继续搜索,我们从 open list 中选择 F 值最小的 ( 方格 ) 节点,然后对所选择的方格作如下操作:
1. 把它从 open list 里取出,放到 close list 中。
2. 检查所有与它相邻的方格,忽略其中在 close list 中或是不可走 (unwalkable) 的方格 ( 比如墙,水,或是其他非法地形 ) ,如果方格不在open lsit 中,则把它们加入到 open list 中。
把我们选定的方格设置为这些新加入的方格的父亲。
3. 如果某个相邻的方格已经在 open list 中,则检查这条路径是否更优,也就是说经由当前方格 ( 我们选中的方格 ) 到达那个方格是否具有更小的 G 值。如果没有,不做任何操作。
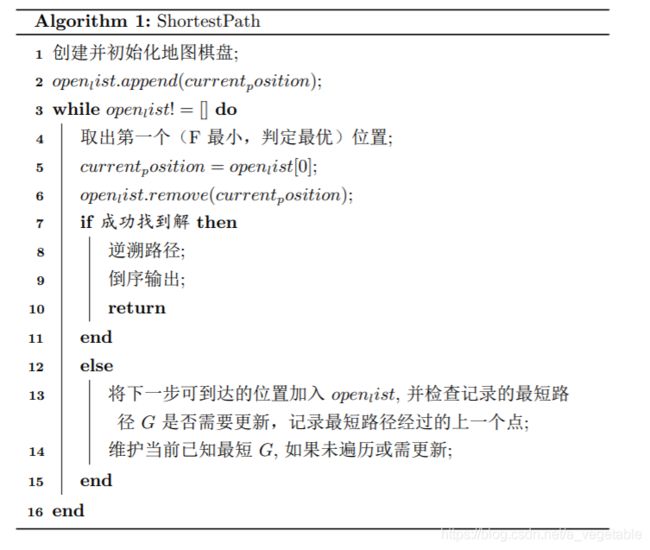
以下是代码的关键部分,简化细节便于读者理解。完整代码在GitHub上可供下载参考,用vscode即可运行。如果对您有用请点个赞吧~
https://github.com/while-TuRe/A-star-ShortestPath
def SearchPath(mapp,cp,target_position):
start_time=time.time()#计时
board = Board(mapp,target_position)#地图棋盘对象
board.GetMsg(cp).IsUnk = 0
open_list.append(cp)
while(open_list != []):
#取出第一个(F最小,判定最优)位置
current_position=open_list[0]
open_list.remove(current_position)
#close_list.append(current_position)用mapx中存储的IsUnk(是否unknow)代替,否则需要在close_list中搜索
#到达
if(current_position == target_position):
print("成功找到解")
按要求输出解
return
#将下一步可到达的位置加入open_list,并检查记录的最短路径G是否需要更新,记录最短路径经过的上一个点
#斜(上下左右与此思路相同,只是细节有差)
for i in [current_position.x-1,current_position.x+1]:
for j in [current_position.y-1,current_position.y+1]:
if(IsInBoard(i,j)):
new_G=board.GetMsg(current_position).G+14
#维护当前已知最短G,如果未遍历或需更新
if(board.mapx[i][j].IsUnk):
board.mapx[i][j].IsUnk=0
open_list.append(Position(i,j))
board.mapx[i][j].parent=current_position
board.mapx[i][j].G=new_G
if(board.mapx[i][j].G>new_G):
board.mapx[i][j].parent=current_position
board.mapx[i][j].G=new_G
#对open_list里的内容按F的大小排序
open_list.sort(key=lambda elem : board.GetMsg(elem).GetF())八数码问题
while-TuRe/A-star-8-Puzzel-Problem: A*八数码问题 (github.com)
八数码问题与最短路径搜索问题的不同主要在于以下几点:
- 目标状态可能无法到达(将棋盘展开按照逆序数的奇偶性进行判断。空格左右移逆序数不变,上下移逆序数变化2)
- close_list不可被替换,open_list中存储的是棋盘的状态(一个3*3的list)
- G表示已走过的步数,H表示每个数字棋子当前位置与目标位置曼哈顿距离的和。
如果您觉得有用,请点亮小心心♥吧~码字不易,多谢鼓励~