OpenMV扫码识别
官方教程:条形码例程讲解;扫描识别视频讲解;二维码识别例程讲解;二维码生成网站
目录
条形码识别详解
固定代码部分
set_windowing()函数讲解
自定义函数详解
死循环详解
sensor.snapshot()函数详解
image.find_barcodes()详解
image.barcode对象讲解
二维码识别详解
image.lens_corr()详解
image.find_qrcodes()函数讲解
image.qrcode对象讲解
img.draw_rectangle()函数讲解
二维码补充理解
生成二维码
代码
条形码识别详解
条形码识别示例
# 条形码识别例程
#
# 这个例子展示了使用OpenMV Cam M7来检测条形码是多么容易。条形码检测不适用于M4相机。
import sensor, image, time, math
sensor.reset() # 重置感光元件,重置摄像机
sensor.set_pixformat(sensor.GRAYSCALE) # 设置为灰度图模式,速率会快一些。
sensor.set_framesize(sensor.VGA) # 高分辨率!
#因为我们的条形码一般都是一个长的矩形,一般要设置窗口大小,小和窄一点。一般窗口设置为640X80.意思是只显示条形码的这一部分。这样能够提高检测速度
sensor.set_windowing((640, 80)) # V Res的80 ==更少的工作(40为2倍的速度)。
sensor.skip_frames(time = 2000) # 跳过n张照片,在更改设置后,跳过一些帧,等待感光元件变稳定。
sensor.set_auto_gain(False) # 自动增益必须关闭此功能,以防止图像冲洗…
sensor.set_auto_whitebal(False) # 白平衡必须关闭此功能,以防止图像冲洗…
clock = time.clock()
# 条形码检测可以在OpenMV Cam的OV7725相机模块的640x480分辨率下运行。
# 条码检测也将在RGB565模式下工作,但分辨率较低。 也就是说,
# 条形码检测需要更高的分辨率才能正常工作,因此应始终以640x480的灰度运行。
def barcode_name(code): #返回条形码所属类型
if(code.type() == image.EAN2):
return "EAN2"
if(code.type() == image.EAN5):
return "EAN5"
if(code.type() == image.EAN8):
return "EAN8"
if(code.type() == image.UPCE):
return "UPCE"
if(code.type() == image.ISBN10):
return "ISBN10"
if(code.type() == image.UPCA):
return "UPCA"
if(code.type() == image.EAN13):
return "EAN13"
if(code.type() == image.ISBN13):
return "ISBN13"
if(code.type() == image.I25):
return "I25"
if(code.type() == image.DATABAR):
return "DATABAR"
if(code.type() == image.DATABAR_EXP):
return "DATABAR_EXP"
if(code.type() == image.CODABAR):
return "CODABAR"
if(code.type() == image.CODE39):
return "CODE39"
if(code.type() == image.PDF417):
return "PDF417"
if(code.type() == image.CODE93):
return "CODE93"
if(code.type() == image.CODE128):
return "CODE128"
while(True):
clock.tick()
img = sensor.snapshot() # 截取感光元件中的一张图片
codes = img.find_barcodes() # 条形码检测函数
for code in codes: # 对于返回的列表中的条形码
img.draw_rectangle(code.rect()) # 将返回的条形码框选
# 打印条形码信息 条形码类型;返回条形码的有效载荷的字符串;返回以弧度计的条形码的旋度(浮点数),此处再转换成角度;返回条形码在图像中被检测到的次数(int);图片帧率
print_args = (barcode_name(code), code.payload(), (180 * code.rotation()) / math.pi, code.quality(), clock.fps())
# 将print_args打印出来,\表示转义字符,目的是打印出“
print("Barcode %s, Payload \"%s\", rotation %f (degrees), quality %d, FPS %f" % print_args)
message = code.payload() # 仅打印条形码信息
print(message)
if not codes:
print("FPS %f" % clock.fps()) # 打印帧率固定代码部分
此处基本为固定代码,只有一处需要讲解。由于条形码识别只需要黑白两色,所以采用灰度图,因此我们可以采用VGA更高的分辨率。
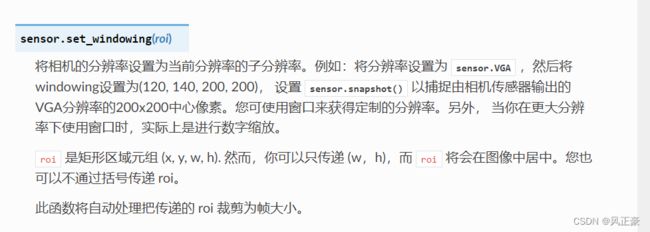
set_windowing()函数讲解
该函数设置识别条形码识别窗口,因为为了条形码为长条形。所以如果为正方形,会有很大一部分为无效信息,可以通过设置识别窗口来提高识别效率。
传入值为roi,我们可以设置矩形区域的其实xy坐标,长宽值。如果我们只输入长宽两个值。此时图形将会居中。因为按照绝大多数人的习惯而言,都是居中看图像,所以我们只需要输入长宽两个值。星瞳官方建议是设置为(640, 80)。但是由于我所识别的条形码在这个框内无法完全识别,所以我个人是设置的(340, 160)
sensor.reset() # 重置感光元件,重置摄像机
sensor.set_pixformat(sensor.GRAYSCALE) # 设置为灰度图模式,速率会快一些。
sensor.set_framesize(sensor.VGA) # 高分辨率!
#因为我们的条形码一般都是一个长的矩形,一般要设置窗口大小,小和窄一点。一般窗口设置为640X80.意思是只显示条形码的这一部分。这样能够提高检测速度
sensor.set_windowing((640, 80)) # V Res的80 ==更少的工作(40为2倍的速度)。
sensor.skip_frames(time = 2000) # 跳过n张照片,在更改设置后,跳过一些帧,等待感光元件变稳定。
sensor.set_auto_gain(False) # 自动增益必须关闭此功能,以防止图像冲洗…
sensor.set_auto_whitebal(False) # 白平衡必须关闭此功能,以防止图像冲洗…
clock = time.clock()自定义函数详解
此函数就只有一个作用,用于识别我们所识别的条形码的类型,在死循环中将会使用。
def barcode_name(code): #返回条形码所属类型
if(code.type() == image.EAN2):
return "EAN2"
if(code.type() == image.EAN5):
return "EAN5"
if(code.type() == image.EAN8):
return "EAN8"
if(code.type() == image.UPCE):
return "UPCE"
if(code.type() == image.ISBN10):
return "ISBN10"
if(code.type() == image.UPCA):
return "UPCA"
if(code.type() == image.EAN13):
return "EAN13"
if(code.type() == image.ISBN13):
return "ISBN13"
if(code.type() == image.I25):
return "I25"
if(code.type() == image.DATABAR):
return "DATABAR"
if(code.type() == image.DATABAR_EXP):
return "DATABAR_EXP"
if(code.type() == image.CODABAR):
return "CODABAR"
if(code.type() == image.CODE39):
return "CODE39"
if(code.type() == image.PDF417):
return "PDF417"
if(code.type() == image.CODE93):
return "CODE93"
if(code.type() == image.CODE128):
return "CODE128"死循环详解
sensor.snapshot()函数详解
img = sensor.snapshot(),截取感光元件中的照片,将截取的图片存入辅助帧缓冲存储区,返回参数image对象。这个时候,img这个变量就是image,可以理解为等价。

image.find_barcodes()详解
因为上面img与image同类,所以img.find_barcodes()=image.find_barcodes() 可以理解为等价。
此函数可以识别条形码,并且返还一个image.barcode(这个下面再说),并且可以传入一个roi的元组。roi就算感兴趣区,可以设置读取条形码的区域。(x, y, w, h)表示识别的左上角xy坐标,感兴趣区的长宽。如果不传入参数,默认识别窗口全部区域。因为我们已经设置了窗口大小,所以不设置感兴趣区。注:个人不建议设置感兴趣区,否则会出现,明明条形码已经出现在图像中了,但是因为感兴趣区的存在,无法识别。
注:如果无法识别,但是没有传入感兴趣区。可能是摄像头聚焦问题。可以烧录示例,进行一次调焦。

image.barcode对象讲解
首先,我们第一个是barcode.corners(),就算条形码的四个角落xy坐标。我们目前没有使用。
 第二个,barcode.rect()。他返回的值给后面的for...in...中img.draw_rectangle()用于绘制识别到的条形码框框。为什么是他来绘制条形码框框呢?我们可以查看img.draw_rectangle()函数解释,需要传入的是(x, y, w, h)的值,而不是四个角落的xy数值。所以是img.draw_rectangle(code.rect()) 而不是img.draw_rectangle(code.corners()) 。
第二个,barcode.rect()。他返回的值给后面的for...in...中img.draw_rectangle()用于绘制识别到的条形码框框。为什么是他来绘制条形码框框呢?我们可以查看img.draw_rectangle()函数解释,需要传入的是(x, y, w, h)的值,而不是四个角落的xy数值。所以是img.draw_rectangle(code.rect()) 而不是img.draw_rectangle(code.corners()) 。
这个时候可能会有人问了,为什么是code.corners()?不是barcode.corners()吗?这个是因为img.find_barcodes()返回了一个image.barcode的对象,这个对象给了codes,而在for...in...中,codes又把自己给等价为code了。所以此处是code.corners(),与barcode.corners()等价。

第三个和之后的就不一样了。他的值是可以通过索引获取,这就表明,他可以被print打印出来。
我们之后会通过print打印出来。以下为识别到条形码之后串行终端(位于左下角)的内容。
首先在自定义函数barcode_name()中传入code。然后我们可以看自定义函数中是code.type(),因为我们说了现在code和barcode等价,code.type()就是barcode.type(),我们看官方定义(在网页中按ctrl+f可搜索barcode.type())可以知道barcode.type()是返回条形码的类型,所以,我们第一个打印出来的是条形码类型。
以此类推,我们打印条形码里面的信息,条形码的旋转角度值(barcode.rotation()返回的是弧度制,弧度值就是Π这种。而此处转换成了角度值,180°就是,360°就是2Π),条形码在图像中被检测到的次数,帧率。
因为只有条形码的内容是有用的,我们可以只写下面messgae这两行。

print_args = (barcode_name(code), code.payload(), (180 * code.rotation()) / math.pi, code.quality(), clock.fps())
# 将print_args打印出来,\表示转义字符,目的是打印出“
print("Barcode %s, Payload \"%s\", rotation %f (degrees), quality %d, FPS %f" % print_args)
message = code.payload() # 仅打印条形码信息
print(message)最后就算打印帧率
print("FPS %f" % clock.fps()) # 打印帧率二维码识别详解
二维码检测示例
# 二维码例程
#
# 这个例子展示了OpenMV Cam使用镜头校正来检测QR码的功能(请参阅qrcodes_with_lens_corr.py脚本以获得更高的性能)。
import sensor, image, time
sensor.reset() # 重置感光元件,重置摄像机
sensor.set_pixformat(sensor.RGB565) # 设置颜色格式为RGB565,彩色,每个像素16bit
sensor.set_framesize(sensor.QVGA) # 图像大小为QVGA
sensor.skip_frames(time = 2000) # 跳过n张照片,在更改设置后,跳过一些帧,等待感光元件变稳定。
sensor.set_auto_gain(False) # 必须关闭此功能,以防止图像冲洗…
clock = time.clock()
while(True):
clock.tick()
img = sensor.snapshot() # 截取感光元件中的一张图片
#采用软件畸变矫正,因为OpenMV标配自带的镜头是2.8mm聚焦的鱼眼镜头,会存在桶形畸变,也就是鱼眼效果,会影响识别二维码
#畸变矫正运算量比较大,可能会影响帧率。对帧率有要求,可购买无畸变镜头,就无需软件畸变矫正
img.lens_corr(1.8) # 1.8的强度参数对于2.8mm镜头来说是不错的。
for code in img.find_qrcodes(): # 进行二维码检测
img.draw_rectangle(code.rect(), color = (255, 0, 0))
print(code) # 打印二维码内容
print(clock.fps()) # 打印帧率
image.lens_corr()详解
此处就算进行畸变矫正,如果因为我们购买的OpenMV的默认镜头是带鱼眼效果的,所以需要进行畸变矫正(注意:此处运算量大,不建议长时间使用OpenMV不然会发烫很严重)。因为我们这里没有指定是传入的zoom,x_corr,y_corr的值,所以按照顺序,传入的1.8是给strength。我们可以调节这个值,来查看即便矫正的效果,建议从1.8开始尝试。zoom就是进行图像缩放,比如10X10的图像,为0.5,就算5X5的图像。建议为默认值,只需要调节strength就行了。

image.find_qrcodes()函数讲解
作用就是对二维码的识别,可以传入感兴趣区(识别区域)。然后返回一个image.qrcode的对象。这个对象里面又二维码的信息。

image.qrcode对象讲解
image.qrcode的内部可以自己看官方文档理解。如下为打印的数据,这个时候有人可能会有疑惑,为什么打印的第一个数据是X的值,而不是qrcode.corners()的值呢?因为我们看官方文档可知,qrcode.corners()和qrcode.rect()是不能通过索引获取,所以没有打印出来。而qrcode.x()是索引0,也就是第一个打印出来的值。

img.draw_rectangle()函数讲解
此处的image.draw_rectangle ()就是在识别到二维码之后,在二维码画一个红色的框框。因为image.draw_rectangle ()需要传输的是x, y, w, h。所以此处传入的是code.rect()而不是qrcode.corners()。后面这个是设置矩形框为红色。

img.draw_rectangle(code.rect(), color = (255, 0, 0))二维码补充理解
生成二维码
因为我们很多时候,需要的是对二维码的数据进行提取和使用。以下为我写的示例。我们利用网站产生一个信息为OpenMV的二维码。如下图

代码
如果识别到了内容为OpenMV的二维码,则在串行终端打印OK
如果识别到的是非OpenMV内容的二维码,串行终端打印“非目标二维码”。
如果没有二维码,就不打印东西。
# 二维码例程
#
# 这个例子展示了OpenMV Cam使用镜头校正来检测QR码的功能(请参阅qrcodes_with_lens_corr.py脚本以获得更高的性能)。
import sensor, image, time
sensor.reset() # 重置感光元件,重置摄像机
sensor.set_pixformat(sensor.RGB565) # 设置颜色格式为RGB565,彩色,每个像素16bit
sensor.set_framesize(sensor.QVGA) # 图像大小为QVGA
sensor.skip_frames(time = 2000) # 跳过n张照片,在更改设置后,跳过一些帧,等待感光元件变稳定。
sensor.set_auto_gain(False) # 必须关闭此功能,以防止图像冲洗…
clock = time.clock()
while(True):
clock.tick()
img = sensor.snapshot() # 截取感光元件中的一张图片
#采用软件畸变矫正,因为OpenMV标配自带的镜头是2.8mm聚焦的鱼眼镜头,会存在桶形畸变,也就是鱼眼效果,会影响识别二维码
#畸变矫正运算量比较大,可能会影响帧率。对帧率有要求,可购买无畸变镜头,就无需软件畸变矫正
img.lens_corr(1.8) # 1.8的强度参数对于2.8mm镜头来说是不错的。
for code in img.find_qrcodes(): # 进行二维码检测
img.draw_rectangle(code.rect(), color = (255, 0, 0))
#print(code) # 输出二维码内容
message = code.payload()
if message == 'OpenMV':
print('ok',message)
else:
print('非目标二维码') #检测到非目标二维码打印
#print(clock.fps())