R-CNN、Fast-R-CNN、Faster-R-CNN详解
object detection我的理解,就是在给定的图片中精确找到物体所在位置,并标注出物体的类别。object detection要解决的问题就是物体在哪里,是什么这整个流程的问题。然而,这个问题可不是那么容易解决的,物体的尺寸变化范围很大,摆放物体的角度,姿态不定,而且可以出现在图片的任何地方,更何况物体还可以是多个类别。
object detection技术的演进:
RCNN->SppNET->Fast-RCNN->Faster-RCNN
*从图像识别的任务说起
这里有一个图像任务:
既要把图中的物体识别出来,又要用方框框出它的位置。

上面的任务用专业的说法就是:图像识别+定位
图像识别(classification):
输入:图片
输出:物体的类别
评估方法:准确率
定位(localization):
输入:图片
输出:方框在图片中的位置(x,y,w,h)
评估方法:检测评价函数 intersection-over-union ( IOU )

卷积神经网络CNN已经帮我们完成了图像识别(判定是猫还是狗)的任务了,我们只需要添加一些额外的功能来完成定位任务即可。
定位的问题的解决思路有哪些?
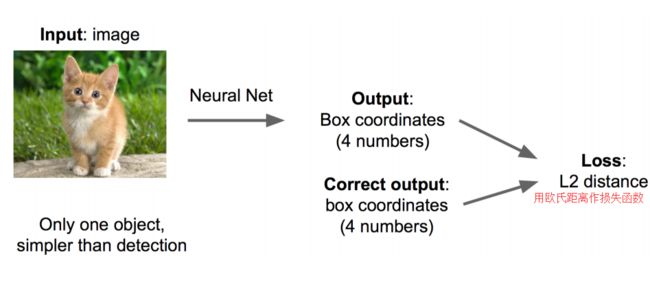
思路一:看做回归问题
看做回归问题,我们需要预测出(x,y,w,h)四个参数的值,从而得出方框的位置。
步骤1:
• 先解决简单问题, 搭一个识别图像的神经网络
• 在AlexNet VGG GoogleLenet上fine-tuning一下

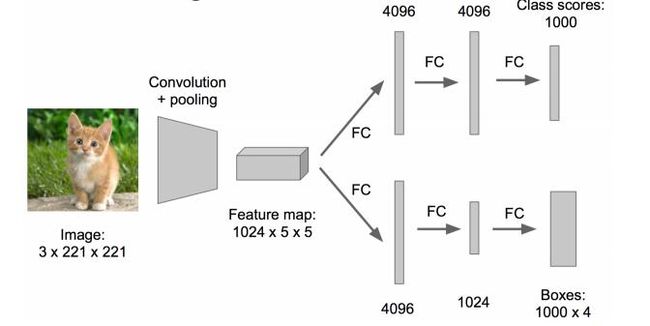
步骤2:
• 在上述神经网络的尾部展开(也就说CNN前面保持不变,我们对CNN的结尾处作出改进:加了两个头:“分类头”和“回归头”)
• 成为classification + regression模式

步骤3:
• Regression那个部分用欧氏距离损失
• 使用SGD训练
步骤4:
• 预测阶段把2个头部拼上
• 完成不同的功能
这里需要进行两次fine-tuning
第一次在ALexNet上做,第二次将头部改成regression head,前面不变,做一次fine-tuning
Regression的部分加在哪?
有两种处理方法:
• 加在最后一个卷积层后面(如VGG)
• 加在最后一个全连接层后面(如R-CNN)
regression太难做了,应想方设法转换为classification问题。
regression的训练参数收敛的时间要长得多,所以上面的网络采取了用classification的网络来计算出网络共同部分的连接权值。
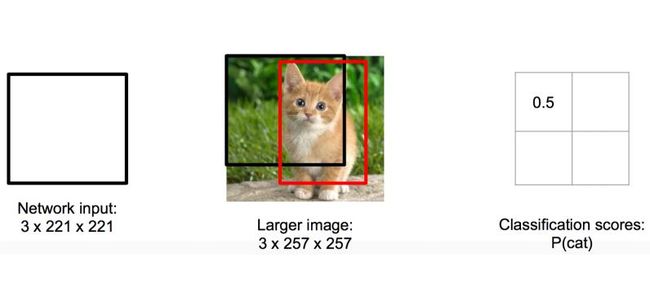
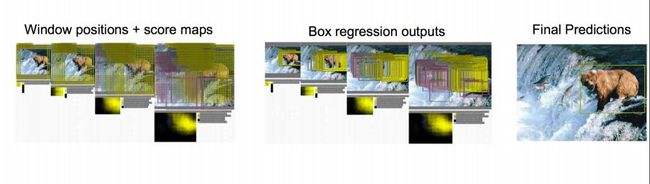
思路二:取图像窗口
• 还是刚才的classification + regression思路
• 咱们取不同的大小的“框”
• 让框出现在不同的位置,得出这个框的判定得分
• 取得分最高的那个框
左上角的黑框:得分0.5
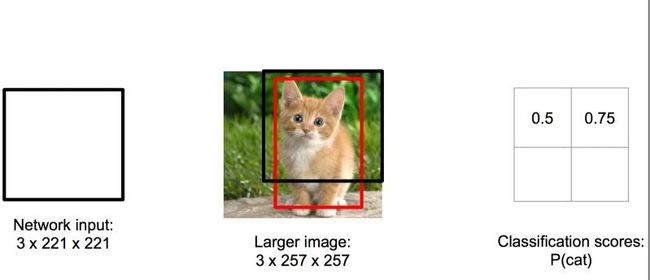
右上角的黑框:得分0.75
左下角的黑框:得分0.6

右下角的黑框:得分0.8

根据得分的高低,我们选择了右下角的黑框作为目标位置的预测。
注:有的时候也会选择得分最高的两个框,然后取两框的交集作为最终的位置预测。
疑惑:框要取多大?
取不同的框,依次从左上角扫到右下角。非常粗暴啊。
总结一下思路:
对一张图片,用各种大小的框(遍历整张图片)将图片截取出来,输入到CNN,然后CNN会输出这个框的得分(classification)以及这个框图片对应的x,y,h,w(regression)。
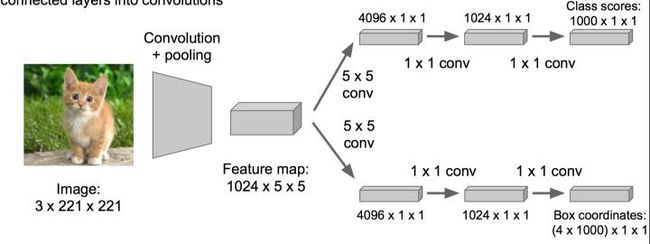
这方法实在太耗时间了,做个优化。
原来网络是这样的:
优化成这样:把全连接层改为卷积层,这样可以提提速。
物体检测(Object Detection)
当图像有很多物体怎么办的?难度可是一下暴增啊。
那任务就变成了:多物体识别+定位多个物体
那把这个任务看做分类问题?
看成分类问题有何不妥?
• 你需要找很多位置, 给很多个不同大小的框
• 你还需要对框内的图像分类
• 当然, 如果你的GPU很强大, 恩, 那加油做吧…
看做classification, 有没有办法优化下?我可不想试那么多框那么多位置啊!
有人想到一个好方法:
找出可能含有物体的框(也就是候选框,比如选1000个候选框),这些框之间是可以互相重叠互相包含的,这样我们就可以避免暴力枚举的所有框了。

大牛们发明好多选定候选框的方法,比如EdgeBoxes和Selective Search。
以下是各种选定候选框的方法的性能对比。
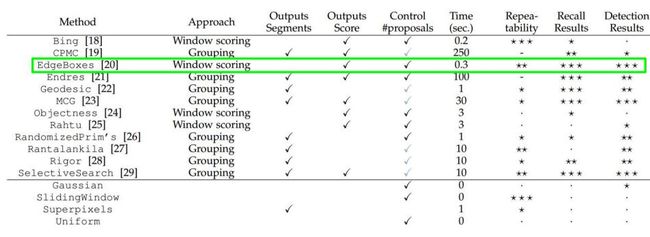
有一个很大的疑惑,提取候选框用到的算法“选择性搜索”到底怎么选出这些候选框的呢?那个就得好好看看它的论文了,这里就不介绍了。
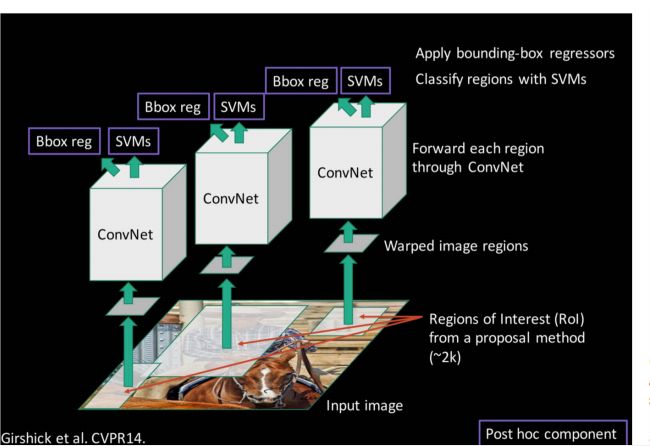
R-CNN横空出世
基于以上的思路,RCNN的出现了。
步骤一:训练(或者下载)一个分类模型(比如AlexNet)

步骤二:对该模型做fine-tuning
• 将分类数从1000改为20
• 去掉最后一个全连接层

步骤三:特征提取
• 提取图像的所有候选框(选择性搜索)
• 对于每一个区域:修正区域大小以适合CNN的输入,做一次前向运算,将第五个池化层的输出(就是对候选框提取到的特征)存到硬盘

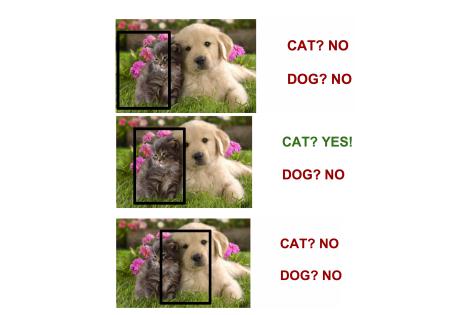
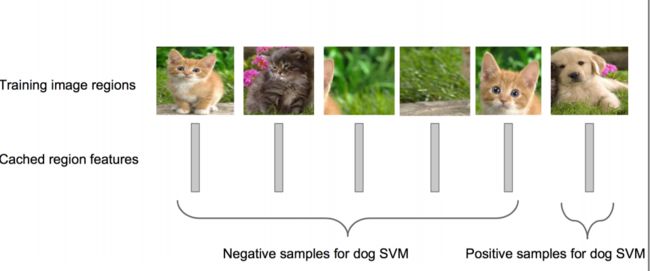
步骤四:训练一个SVM分类器(二分类)来判断这个候选框里物体的类别
每个类别对应一个SVM,判断是不是属于这个类别,是就是positive,反之nagative
比如下图,就是狗分类的SVM
步骤五:使用回归器精细修正候选框位置:对于每一个类,训练一个线性回归模型去判定这个框是否框得完美。

RCNN的进化中SPP Net的思想对其贡献很大,这里也简单介绍一下SPP Net。
SPP Net
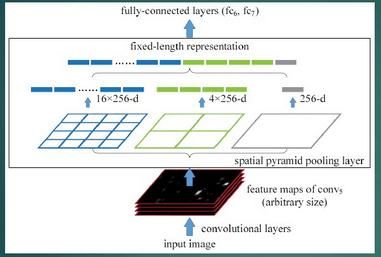
SPP:Spatial Pyramid Pooling(空间金字塔池化)
它的特点有两个:
1.结合空间金字塔方法实现CNNs的对尺度输入。
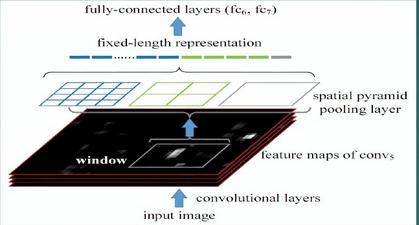
一般CNN后接全连接层或者分类器,他们都需要固定的输入尺寸,因此不得不对输入数据进行crop或者warp,这些预处理会造成数据的丢失或几何的失真。SPP Net的第一个贡献就是将金字塔思想加入到CNN,实现了数据的多尺度输入。
如下图所示,在卷积层和全连接层之间加入了SPP layer。此时网络的输入可以是任意尺度的,在SPP layer中每一个pooling的filter会根据输入调整大小,而SPP的输出尺度始终是固定的。
2.只对原图提取一次卷积特征
在R-CNN中,每个候选框先resize到统一大小,然后分别作为CNN的输入,这样是很低效的。
所以SPP Net根据这个缺点做了优化:只对原图进行一次卷积得到整张图的feature map,然后找到每个候选框zaifeature map上的映射patch,将此patch作为每个候选框的卷积特征输入到SPP layer和之后的层。节省了大量的计算时间,比R-CNN有一百倍左右的提速。
Fast R-CNN
SPP Net真是个好方法,R-CNN的进阶版Fast R-CNN就是在RCNN的基础上采纳了SPP Net方法,对RCNN作了改进,使得性能进一步提高。
R-CNN与Fast RCNN的区别有哪些呢?
先说RCNN的缺点:即使使用了selective search等预处理步骤来提取潜在的bounding box作为输入,但是RCNN仍会有严重的速度瓶颈,原因也很明显,就是计算机对所有region进行特征提取时会有重复计算,Fast-RCNN正是为了解决这个问题诞生的。
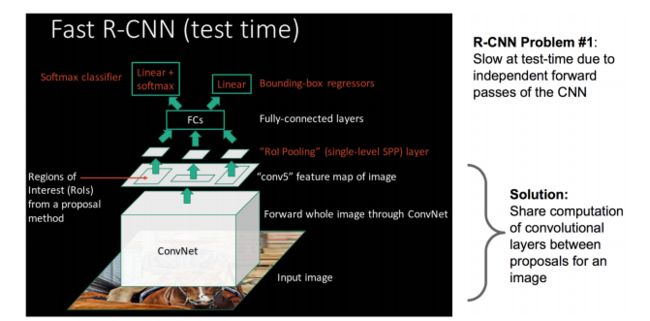
大牛提出了一个可以看做单层sppnet的网络层,叫做ROI Pooling,这个网络层可以把不同大小的输入映射到一个固定尺度的特征向量,而我们知道,conv、pooling、relu等操作都不需要固定size的输入,因此,在原始图片上执行这些操作后,虽然输入图片size不同导致得到的feature map尺寸也不同,不能直接接到一个全连接层进行分类,但是可以加入这个神奇的ROI Pooling层,对每个region都提取一个固定维度的特征表示,再通过正常的softmax进行类型识别。另外,之前RCNN的处理流程是先提proposal,然后CNN提取特征,之后用SVM分类器,最后再做bbox regression,而在Fast-RCNN中,作者巧妙的把bbox regression放进了神经网络内部,与region分类和并成为了一个multi-task模型,实际实验也证明,这两个任务能够共享卷积特征,并相互促进。Fast-RCNN很重要的一个贡献是成功的让人们看到了Region Proposal+CNN这一框架实时检测的希望,原来多类检测真的可以在保证准确率的同时提升处理速度,也为后来的Faster-RCNN做下了铺垫。
画一画重点:
R-CNN有一些相当大的缺点(把这些缺点都改掉了,就成了Fast R-CNN)。
大缺点:由于每一个候选框都要独自经过CNN,这使得花费的时间非常多。
解决:共享卷积层,现在不是每一个候选框都当做输入进入CNN了,而是输入一张完整的图片,在第五个卷积层再得到每个候选框的特征
原来的方法:许多候选框(比如两千个)–>CNN–>得到每个候选框的特征–>分类+回归
现在的方法:一张完整图片–>CNN–>得到每张候选框的特征–>分类+回归
所以容易看见,Fast RCNN相对于RCNN的提速原因就在于:不过不像RCNN把每个候选区域给深度网络提特征,而是整张图提一次特征,再把候选框映射到conv5上,而SPP只需要计算一次特征,剩下的只需要在conv5层上操作就可以了。
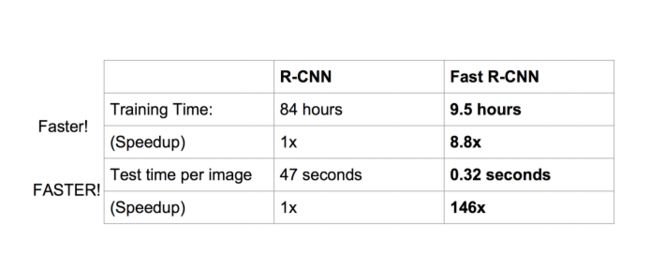
在性能上提升也是相当明显的:
Faster R-CNN
Fast R-CNN存在的问题:存在瓶颈:选择性搜索,找出所有的候选框,这个也非常耗时。那我们能不能找出一个更加高效的方法来求出这些候选框呢?
解决:加入一个提取边缘的神经网络,也就说找到候选框的工作也交给神经网络来做了。
做这样的任务的神经网络叫做Region Proposal Network(RPN)。
具体做法:
• 将RPN放在最后一个卷积层的后面
• RPN直接训练得到候选区域
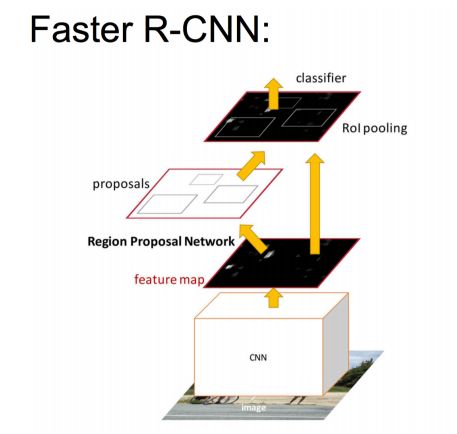
RPN简介:
• 在feature map上滑动窗口
• 建一个神经网络用于物体分类+框位置的回归
• 滑动窗口的位置提供了物体的大体位置信息
• 框的回归提供了框更精确的位置

一种网络,四个损失函数;
• RPN calssification(anchor good.bad)
• RPN regression(anchor->propoasal)
• Fast R-CNN classification(over classes)
• Fast R-CNN regression(proposal ->box)

速度对比
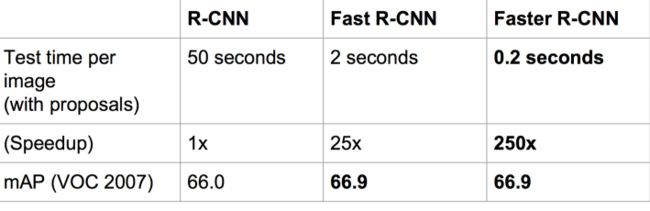
Faster R-CNN的主要贡献是设计了提取候选区域的网络RPN,代替了费时的选择性搜索,使得检测速度大幅提高。
最后总结一下各大算法的步骤:
RCNN
1. 在图像中确定约1000-2000个候选框 (使用选择性搜索)
2. 每个候选框内图像块缩放至相同大小,并输入到CNN内进行特征提取
3. 对候选框中提取出的特征,使用分类器判别是否属于一个特定类
4. 对于属于某一特征的候选框,用回归器进一步调整其位置
Fast RCNN
1. 在图像中确定约1000-2000个候选框 (使用选择性搜索)
2. 对整张图片输进CNN,得到feature map
3. 找到每个候选框在feature map上的映射patch,将此patch作为每个候选框的卷积特征输入到SPP layer和之后的层
4. 对候选框中提取出的特征,使用分类器判别是否属于一个特定类
5. 对于属于某一特征的候选框,用回归器进一步调整其位置
Faster RCNN
1. 对整张图片输进CNN,得到feature map
2. 卷积特征输入到RPN,得到候选框的特征信息
3. 对候选框中提取出的特征,使用分类器判别是否属于一个特定类
4. 对于属于某一特征的候选框,用回归器进一步调整其位置
总的来说,从R-CNN, SPP-NET, Fast R-CNN, Faster R-CNN一路走来,基于深度学习目标检测的流程变得越来越精简,精度越来越高,速度也越来越快。可以说基于region proposal的R-CNN系列目标检测方法是当前目标检测技术领域最主要的一个分支。