MOT(二)--Bytetrack
MOT(二)–Bytetrack
记录MOT的学习之旅
文章目录
- MOT(二)--Bytetrack
-
- @[TOC](文章目录)
- 一 背景
- 二、算法原理
- 三、代码解析
文章目录
- MOT(二)--Bytetrack
-
- @[TOC](文章目录)
- 一 背景
- 二、算法原理
- 三、代码解析
一 背景
改算法来源于字节跳动实验室,其核心目的是为了解决 SORT 中的缺陷,其基本思想是:分别处理检测中的高分值目标与低分值目标,进行多层级的匹配,实现更好的分配与追踪效果。
二、算法原理
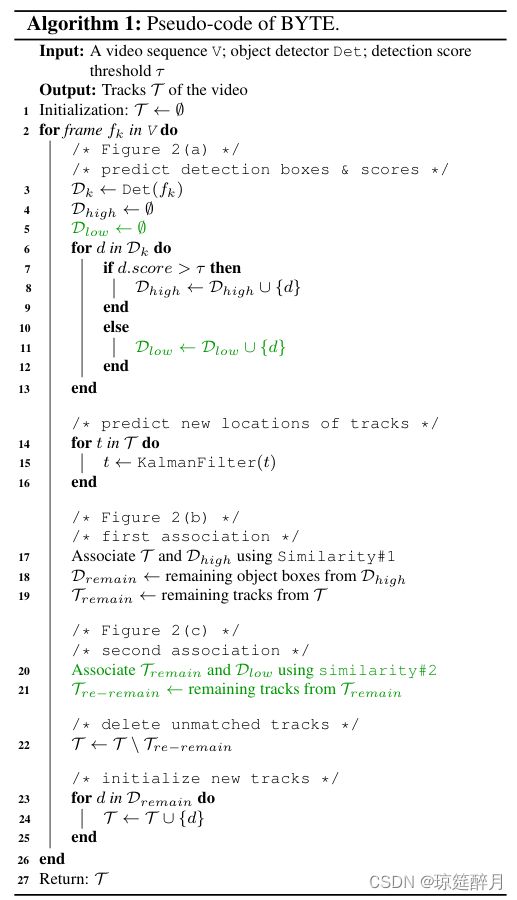
byte的主要作用是,解决了低检测分值匹配不准及物体短暂性遮挡的问题,其基本算法原理为:
- 目标检测,对于视频数据而言,目标检测的算法与方式有
n种,其输出结构都可以构造成rect + centroid + score + label的形式; - 根据
score对检测结果进行划分,通过阈值判断,将检测结果分成high score与low score两个部分; - 初次匹配,将
high score中的检测结果与原有轨迹进行匹配追踪(与SORT雷同),会有部分轨迹没有被匹配成功; - 再次匹配,将步骤3中剩余的轨迹与
low score中的数据进行匹配; - 对于没有匹配上跟踪轨迹,得分又足够高的检测框,新建一个跟踪轨迹。对于没有匹配上检测框的跟踪轨迹,保留
m帧,在其再次出现时再进行匹配;
算法伪代码如下(来源于论文):
三、代码解析
核心代码如下,其文件名为:byte_tracker.py
def update(self, output_results, img_info, img_size):
self.frame_id += 1
activated_starcks = []
refind_stracks = []
lost_stracks = []
removed_stracks = []
if output_results.shape[1] == 5:
scores = output_results[:, 4]
bboxes = output_results[:, :4]
else:
output_results = output_results.cpu().numpy()
scores = output_results[:, 4] * output_results[:, 5]
bboxes = output_results[:, :4] # x1y1x2y2
img_h, img_w = img_info[0], img_info[1]
scale = min(img_size[0] / float(img_h), img_size[1] / float(img_w))
bboxes /= scale
remain_inds = scores > self.args.track_thresh
inds_low = scores > 0.1
inds_high = scores < self.args.track_thresh
inds_second = np.logical_and(inds_low, inds_high)
dets_second = bboxes[inds_second]
dets = bboxes[remain_inds]
scores_keep = scores[remain_inds]
scores_second = scores[inds_second]
if len(dets) > 0:
'''Detections'''
detections = [STrack(STrack.tlbr_to_tlwh(tlbr), s) for
(tlbr, s) in zip(dets, scores_keep)]
else:
detections = []
''' Add newly detected tracklets to tracked_stracks'''
unconfirmed = []
tracked_stracks = [] # type: list[STrack]
for track in self.tracked_stracks:
if not track.is_activated:
unconfirmed.append(track)
else:
tracked_stracks.append(track)
''' Step 2: First association, with high score detection boxes'''
strack_pool = joint_stracks(tracked_stracks, self.lost_stracks)
# Predict the current location with KF
STrack.multi_predict(strack_pool)
dists = matching.iou_distance(strack_pool, detections)
if not self.args.mot20:
dists = matching.fuse_score(dists, detections)
matches, u_track, u_detection = matching.linear_assignment(dists, thresh=self.args.match_thresh)
for itracked, idet in matches:
track = strack_pool[itracked]
det = detections[idet]
if track.state == TrackState.Tracked:
track.update(detections[idet], self.frame_id)
activated_starcks.append(track)
else:
track.re_activate(det, self.frame_id, new_id=False)
refind_stracks.append(track)
''' Step 3: Second association, with low score detection boxes'''
# association the untrack to the low score detections
if len(dets_second) > 0:
'''Detections'''
detections_second = [STrack(STrack.tlbr_to_tlwh(tlbr), s) for
(tlbr, s) in zip(dets_second, scores_second)]
else:
detections_second = []
r_tracked_stracks = [strack_pool[i] for i in u_track if strack_pool[i].state == TrackState.Tracked]
dists = matching.iou_distance(r_tracked_stracks, detections_second)
matches, u_track, u_detection_second = matching.linear_assignment(dists, thresh=0.5)
for itracked, idet in matches:
track = r_tracked_stracks[itracked]
det = detections_second[idet]
if track.state == TrackState.Tracked:
track.update(det, self.frame_id)
activated_starcks.append(track)
else:
track.re_activate(det, self.frame_id, new_id=False)
refind_stracks.append(track)
for it in u_track:
track = r_tracked_stracks[it]
if not track.state == TrackState.Lost:
track.mark_lost()
lost_stracks.append(track)
'''Deal with unconfirmed tracks, usually tracks with only one beginning frame'''
detections = [detections[i] for i in u_detection]
dists = matching.iou_distance(unconfirmed, detections)
if not self.args.mot20:
dists = matching.fuse_score(dists, detections)
matches, u_unconfirmed, u_detection = matching.linear_assignment(dists, thresh=0.7)
for itracked, idet in matches:
unconfirmed[itracked].update(detections[idet], self.frame_id)
activated_starcks.append(unconfirmed[itracked])
for it in u_unconfirmed:
track = unconfirmed[it]
track.mark_removed()
removed_stracks.append(track)
""" Step 4: Init new stracks"""
for inew in u_detection:
track = detections[inew]
if track.score < self.det_thresh:
continue
track.activate(self.kalman_filter, self.frame_id)
activated_starcks.append(track)
""" Step 5: Update state"""
for track in self.lost_stracks:
if self.frame_id - track.end_frame > self.max_time_lost:
track.mark_removed()
removed_stracks.append(track)
# print('Ramained match {} s'.format(t4-t3))
self.tracked_stracks = [t for t in self.tracked_stracks if t.state == TrackState.Tracked]
self.tracked_stracks = joint_stracks(self.tracked_stracks, activated_starcks)
self.tracked_stracks = joint_stracks(self.tracked_stracks, refind_stracks)
self.lost_stracks = sub_stracks(self.lost_stracks, self.tracked_stracks)
self.lost_stracks.extend(lost_stracks)
self.lost_stracks = sub_stracks(self.lost_stracks, self.removed_stracks)
self.removed_stracks.extend(removed_stracks)
self.tracked_stracks, self.lost_stracks = remove_duplicate_stracks(self.tracked_stracks, self.lost_stracks)
# get scores of lost tracks
output_stracks = [track for track in self.tracked_stracks if track.is_activated]
return output_stracks