OpenCV图像处理
图像处理
几何变换
图像缩放
缩放是对图像的大小进行调整,即使图像放大或缩小。
cv2.resize(src,dsize,fx=0,fy=0,interpolation=cv2.INTER_LINEAR)
参数:
-
src : 输入图像
-
dsize: 绝对尺寸,直接指定调整后图像的大小
-
fx,fy: 相对尺寸,将dsize设置为None,然后将fx和fy设置为比例因子即可
-
interpolation:插值方法

import cv2 as cv
# 1. 读取图片
img1 = cv.imread("./image/dog.jpeg")
# 2.图像缩放
# 2.1 绝对尺寸
rows,cols = img1.shape[:2]
res = cv.resize(img1,(2*cols,2*rows),interpolation=cv.INTER_CUBIC)
# 2.2 相对尺寸
res1 = cv.resize(img1,None,fx=0.5,fy=0.5)
# 3 图像显示
# 3.1 使用opencv显示图像(不推荐)
cv.imshow("orignal",img1)
cv.imshow("enlarge",res)
cv.imshow("shrink)",res1)
cv.waitKey(0)
# 3.2 使用matplotlib显示图像
fig,axes=plt.subplots(nrows=1,ncols=3,figsize=(10,8),dpi=100)
axes[0].imshow(res[:,:,::-1])
axes[0].set_title("绝对尺度(放大)")
axes[1].imshow(img1[:,:,::-1])
axes[1].set_title("原图")
axes[2].imshow(res1[:,:,::-1])
axes[2].set_title("相对尺度(缩小)")
plt.show()
图像平移
图像平移将图像按照指定方向和距离,移动到相应的位置。
cv.warpAffine(img,M,dsize)
参数:
-
img: 输入图像
-
M: 2*∗3移动矩阵
对于(x,y)处的像素点,要把它移动到(x+t_x , y+t_yx+tx ,y+ty )处时,M矩阵应如下设置:
[ 1 0 T x 0 1 T y ] \begin{bmatrix} {1}&{0}&{Tx}\\ {0}&{1}&{Ty}\\ \\ \\ \end{bmatrix} ⎣⎢⎢⎡1001TxTy⎦⎥⎥⎤
注意:将MM设置为np.float32类型的Numpy数组。
- dsize: 输出图像的大小
注意:输出图像的大小,它应该是(宽度,高度)的形式。请记住,width=列数,height=行数。
示例:
需求是将图像的像素点移动(50,100)的距离:
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
# 1. 读取图像
img1 = cv.imread("./image/image2.jpg")
# 2. 图像平移
rows,cols = img1.shape[:2]
M = M = np.float32([[1,0,100],[0,1,50]])# 平移矩阵
dst = cv.warpAffine(img1,M,(cols,rows))
# 3. 图像显示
fig,axes=plt.subplots(nrows=1,ncols=2,figsize=(10,8),dpi=100)
axes[0].imshow(img1[:,:,::-1])
axes[0].set_title("原图")
axes[1].imshow(dst[:,:,::-1])
axes[1].set_title("平移后结果")
plt.show()
图像旋转
图像旋转是指图像按照某个位置转动一定角度的过程,旋转中图像仍保持这原始尺寸。图像旋转后图像的水平对称轴、垂直对称轴及中心坐标原点都可能会发生变换,因此需要对图像旋转中的坐标进行相应转换。
cv2.getRotationMatrix2D(center, angle, scale)
参数:
- center:旋转中心
- angle:旋转角度
- scale:缩放比例
返回:
- M:旋转矩阵
调用cv.warpAffine完成图像的旋转
示例:
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
# 1 读取图像
img = cv.imread("./image/image2.jpg")
# 2 图像旋转
rows,cols = img.shape[:2]
# 2.1 生成旋转矩阵
M = cv.getRotationMatrix2D((cols/2,rows/2),90,1)
# 2.2 进行旋转变换
dst = cv.warpAffine(img,M,(cols,rows))
# 3 图像展示
fig,axes=plt.subplots(nrows=1,ncols=2,figsize=(10,8),dpi=100)
axes[0].imshow(img1[:,:,::-1])
axes[0].set_title("原图")
axes[1].imshow(dst[:,:,::-1])
axes[1].set_title("旋转后结果")
plt.show()
仿射变换
图像的仿射变换涉及到图像的形状位置角度的变化,是深度学习预处理中常到的功能,仿射变换主要是对图像的缩放,旋转,翻转和平移等操作的组合。
示例:
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
# 1 图像读取
img = cv.imread("./image/image2.jpg")
# 2 仿射变换
rows,cols = img.shape[:2]
# 2.1 创建变换矩阵
pts1 = np.float32([[50,50],[200,50],[50,200]])
pts2 = np.float32([[100,100],[200,50],[100,250]])
M = cv.getAffineTransform(pts1,pts2)
# 2.2 完成仿射变换
dst = cv.warpAffine(img,M,(cols,rows))
# 3 图像显示
fig,axes=plt.subplots(nrows=1,ncols=2,figsize=(10,8),dpi=100)
axes[0].imshow(img[:,:,::-1])
axes[0].set_title("原图")
axes[1].imshow(dst[:,:,::-1])
axes[1].set_title("仿射后结果")
plt.show()
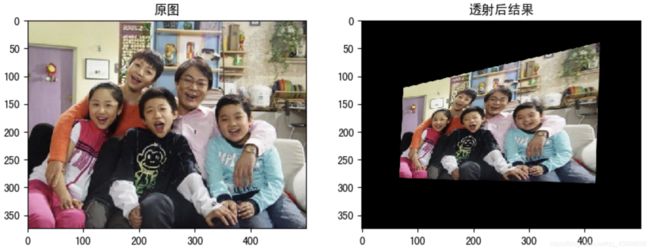
透射变换
透射变换是视角变化的结果,是指利用透视中心、像点、目标点三点共线的条件,按透视旋转定律使承影面(透视面)绕迹线(透视轴)旋转某一角度,破坏原有的投影光线束,仍能保持承影面上投影几何图形不变的变换。
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
# 1 读取图像
img = cv.imread("./image/image2.jpg")
# 2 透射变换
rows,cols = img.shape[:2]
# 2.1 创建变换矩阵
pts1 = np.float32([[56,65],[368,52],[28,387],[389,390]])
pts2 = np.float32([[100,145],[300,100],[80,290],[310,300]])
T = cv.getPerspectiveTransform(pts1,pts2)
# 2.2 进行变换
dst = cv.warpPerspective(img,T,(cols,rows))
# 3 图像显示
fig,axes=plt.subplots(nrows=1,ncols=2,figsize=(10,8),dpi=100)
axes[0].imshow(img[:,:,::-1])
axes[0].set_title("原图")
axes[1].imshow(dst[:,:,::-1])
axes[1].set_title("透射后结果")
plt.show()
图像金字塔
图像金字塔是图像多尺度表达的一种,最主要用于图像的分割,是一种以多分辨率来解释图像的有效但概念简单的结构。
图像金字塔用于机器视觉和图像压缩,一幅图像的金字塔是一系列以金字塔形状排列的分辨率逐步降低,且来源于同一张原始图的图像集合。其通过梯次向下采样获得,直到达到某个终止条件才停止采样。
金字塔的底部是待处理图像的高分辨率表示,而顶部是低分辨率的近似,层级越高,图像越小,分辨率越低。
cv.pyrUp(img) #对图像进行上采样
cv.pyrDown(img) #对图像进行下采样
示例:
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
# 1 图像读取
img = cv.imread("./image/image2.jpg")
# 2 进行图像采样
up_img = cv.pyrUp(img) # 上采样操作
img_1 = cv.pyrDown(img) # 下采样操作
# 3 图像显示
cv.imshow('enlarge', up_img)
cv.imshow('original', img)
cv.imshow('shrink', img_1)
cv.waitKey(0)
cv.destroyAllWindows()
形态学操作
腐蚀和膨胀
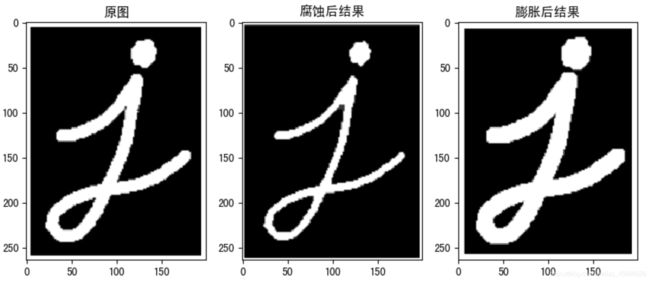
腐蚀和膨胀是最基本的形态学操作,腐蚀和膨胀都是针对白色部分(高亮部分)而言的。
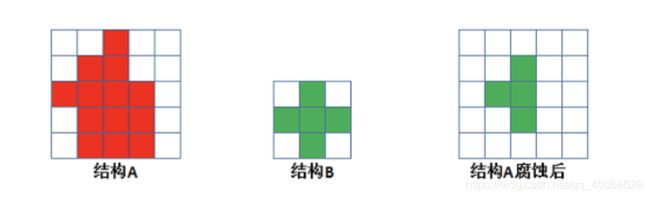
具体操作是:用一个结构元素扫描图像中的每一个像素,用结构元素中的每一个像素与其覆盖的像素做“与”操作,如果都为1,则该像素为1,否则为0。如下图所示,结构A被结构B腐蚀后:
cv.erode(img,kernel,iterations)
参数:
- img: 要处理的图像
- kernel: 核结构
- iterations: 腐蚀的次数,默认是1
膨胀就是使图像中高亮部分扩张,效果图拥有比原图更大的高亮区域;腐蚀是原图中的高亮区域被蚕食,效果图拥有比原图更小的高亮区域。膨胀是求局部最大值的操作,腐蚀是求局部最小值的操作。
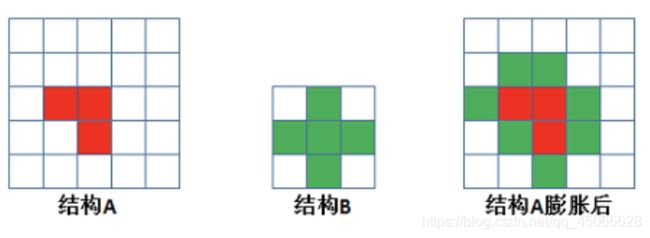
具体操作是:用一个结构元素扫描图像中的每一个像素,用结构元素中的每一个像素与其覆盖的像素做“与”操作,如果都为0,则该像素为0,否则为1。如下图所示,结构A被结构B腐蚀后:
cv.dilate(img,kernel,iterations)
参数:
-
img: 要处理的图像
-
kernel: 核结构
-
iterations: 腐蚀的次数,默认是1
示例:
我们使用一个5*5的卷积核实现腐蚀和膨胀的运算:
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
# 1 读取图像
img = cv.imread("./image/image3.png")
# 2 创建核结构
kernel = np.ones((5, 5), np.uint8)
# 3 图像腐蚀和膨胀
erosion = cv.erode(img, kernel) # 腐蚀
dilate = cv.dilate(img,kernel) # 膨胀
# 4 图像展示
fig,axes=plt.subplots(nrows=1,ncols=3,figsize=(10,8),dpi=100)
axes[0].imshow(img)
axes[0].set_title("原图")
axes[1].imshow(erosion)
axes[1].set_title("腐蚀后结果")
axes[2].imshow(dilate)
axes[2].set_title("膨胀后结果")
plt.show()
开闭运算
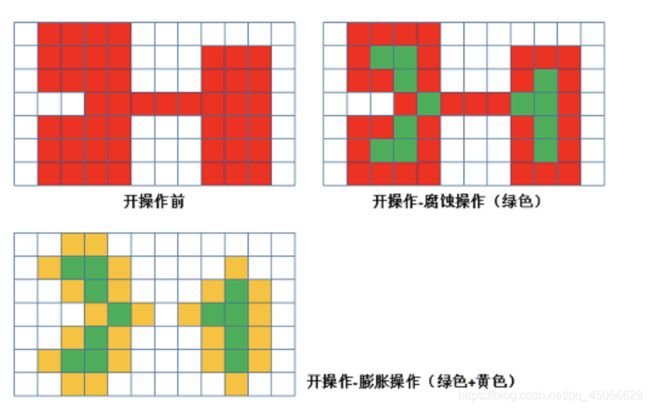
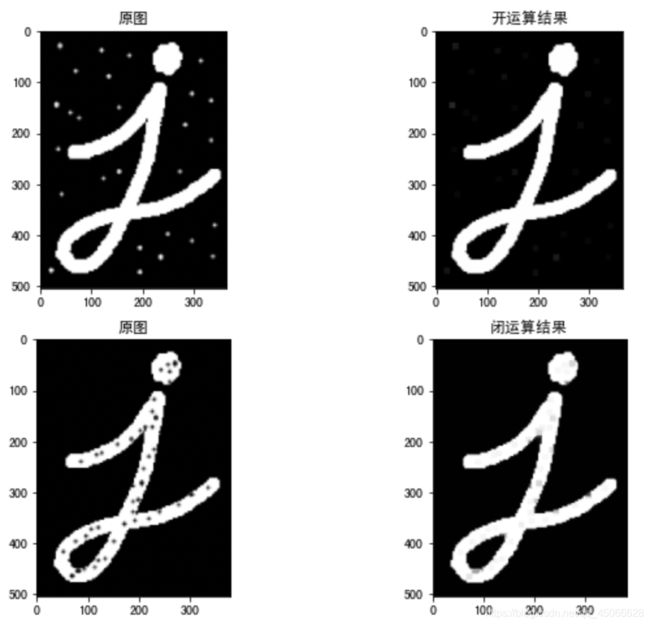
开运算是先腐蚀后膨胀,其作用是:分离物体,消除小区域。特点:消除噪点,去除小的干扰块,而不影响原来的图像。
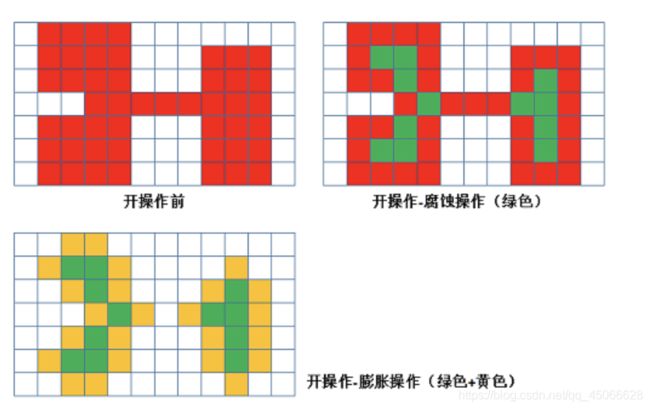
闭运算与开运算相反,是先膨胀后腐蚀,作用是消除/“闭合”物体里面的孔洞,特点:可以填充闭合区域。
cv.morphologyEx(img, op, kernel)
参数:
- img: 要处理的图像
- op: 处理方式:若进行开运算,则设为cv.MORPH_OPEN,若进行闭运算,则设为cv.MORPH_CLOSE
- Kernel: 核结构
示例:
使用10*10的核结构对卷积进行开闭运算的实现。
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
# 1 读取图像
img1 = cv.imread("./image/image5.png")
img2 = cv.imread("./image/image6.png")
# 2 创建核结构
kernel = np.ones((10, 10), np.uint8)
# 3 图像的开闭运算
cvOpen = cv.morphologyEx(img1,cv.MORPH_OPEN,kernel) # 开运算
cvClose = cv.morphologyEx(img2,cv.MORPH_CLOSE,kernel)# 闭运算
# 4 图像展示
fig,axes=plt.subplots(nrows=2,ncols=2,figsize=(10,8))
axes[0,0].imshow(img1)
axes[0,0].set_title("原图")
axes[0,1].imshow(cvOpen)
axes[0,1].set_title("开运算结果")
axes[1,0].imshow(img2)
axes[1,0].set_title("原图")
axes[1,1].imshow(cvClose)
axes[1,1].set_title("闭运算结果")
plt.show()
礼帽和黑帽
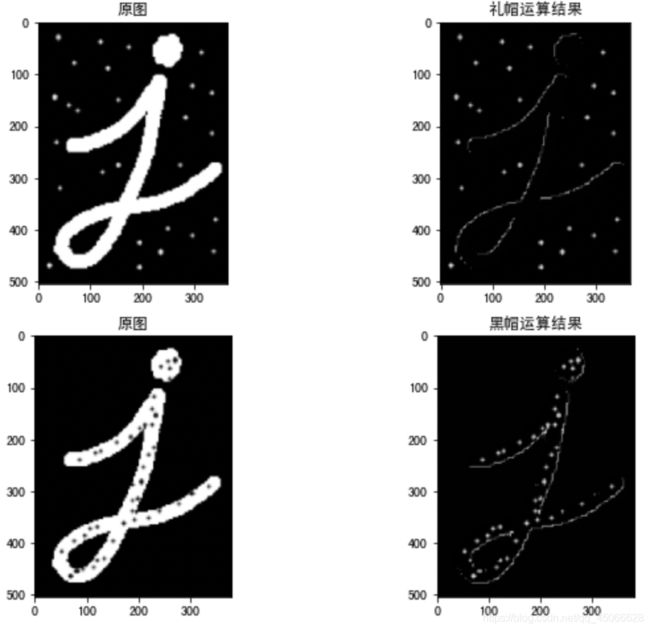
礼帽运算
原图像与“开运算“的结果图之差,如下式计算:
![]()
因为开运算带来的结果是放大了裂缝或者局部低亮度的区域,因此,从原图中减去开运算后的图,得到的效果图突出了比原图轮廓周围的区域更明亮的区域,且这一操作和选择的核的大小相关。
礼帽运算用来分离比邻近点亮一些的斑块。当一幅图像具有大幅的背景的时候,而微小物品比较有规律的情况下,可以使用顶帽运算进行背景提取。
黑帽运算
为”闭运算“的结果图与原图像之差。数学表达式为:
![]()
黑帽运算后的效果图突出了比原图轮廓周围的区域更暗的区域,且这一操作和选择的核的大小相关。
黑帽运算用来分离比邻近点暗一些的斑块。
cv.morphologyEx(img, op, kernel)
参数:
-
img: 要处理的图像
-
op: 处理方式:

示例:
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
# 1 读取图像
img1 = cv.imread("./image/image5.png")
img2 = cv.imread("./image/image6.png")
# 2 创建核结构
kernel = np.ones((10, 10), np.uint8)
# 3 图像的礼帽和黑帽运算
cvOpen = cv.morphologyEx(img1,cv.MORPH_TOPHAT,kernel) # 礼帽运算
cvClose = cv.morphologyEx(img2,cv.MORPH_BLACKHAT,kernel)# 黑帽运算
# 4 图像显示
fig,axes=plt.subplots(nrows=2,ncols=2,figsize=(10,8))
axes[0,0].imshow(img1)
axes[0,0].set_title("原图")
axes[0,1].imshow(cvOpen)
axes[0,1].set_title("礼帽运算结果")
axes[1,0].imshow(img2)
axes[1,0].set_title("原图")
axes[1,1].imshow(cvClose)
axes[1,1].set_title("黑帽运算结果")
plt.show()
图像噪声
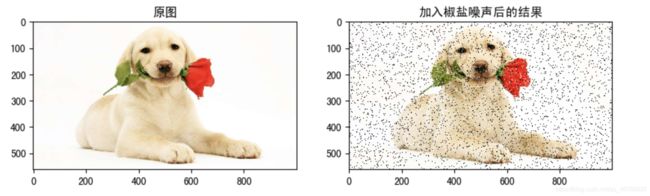
椒盐噪声
椒盐噪声也称为脉冲噪声,是图像中经常见到的一种噪声,它是一种随机出现的白点或者黑点,可能是亮的区域有黑色像素或是在暗的区域有白色像素(或是两者皆有)。椒盐噪声的成因可能是影像讯号受到突如其来的强烈干扰而产生、类比数位转换器或位元传输错误等。例如失效的感应器导致像素值为最小值,饱和的感应器导致像素值为最大值。
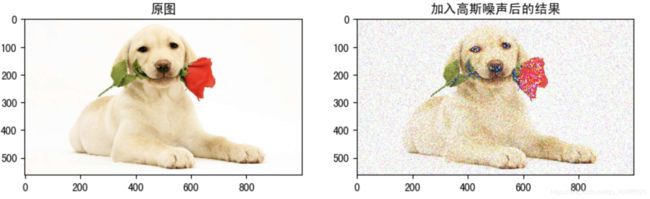
高斯噪声
高斯噪声是指噪声密度函数服从高斯分布的一类噪声。
图像平滑简介
图像平滑从信号处理的角度看就是去除其中的高频信息,保留低频信息。因此我们可以对图像实施低通滤波。低通滤波可以去除图像中的噪声,对图像进行平滑。
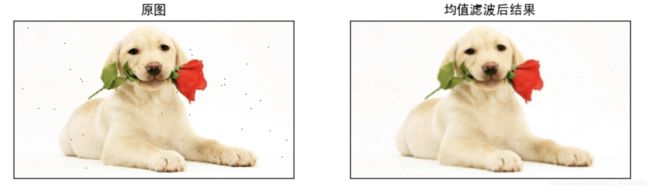
均值滤波
均值滤波的优点是算法简单,计算速度较快,缺点是在去噪的同时去除了很多细节部分,将图像变得模糊。
cv.blur(src, ksize, anchor, borderType)
参数:
- src:输入图像
- ksize:卷积核的大小
- anchor:默认值 (-1,-1) ,表示核中心
- borderType:边界类型
示例:
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
# 1 图像读取
img = cv.imread('./image/dogsp.jpeg')
# 2 均值滤波
blur = cv.blur(img,(5,5))
# 3 图像显示
plt.figure(figsize=(10,8),dpi=100)
plt.subplot(121),plt.imshow(img[:,:,::-1]),plt.title('原图')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(blur[:,:,::-1]),plt.title('均值滤波后结果')
plt.xticks([]), plt.yticks([])
plt.show()
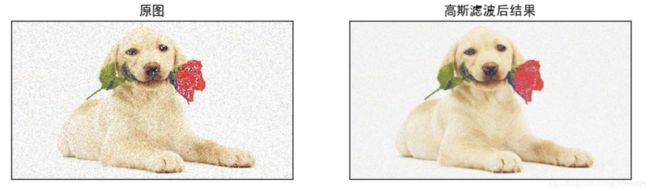
高斯滤波
cv2.GaussianBlur(src,ksize,sigmaX,sigmay,borderType)
参数:
- src: 输入图像
- ksize:高斯卷积核的大小,注意 : 卷积核的宽度和高度都应为奇数,且可以不同
- sigmaX: 水平方向的标准差
- sigmaY: 垂直方向的标准差,默认值为0,表示与sigmaX相同
- borderType:填充边界类型
示例:
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
# 1 图像读取
img = cv.imread('./image/dogGasuss.jpeg')
# 2 高斯滤波
blur = cv.GaussianBlur(img,(3,3),1)
# 3 图像显示
plt.figure(figsize=(10,8),dpi=100)
plt.subplot(121),plt.imshow(img[:,:,::-1]),plt.title('原图')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(blur[:,:,::-1]),plt.title('高斯滤波后结果')
plt.xticks([]), plt.yticks([])
plt.show()
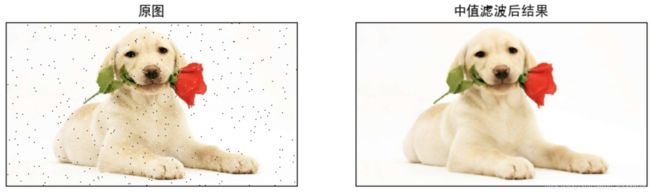
中值滤波
中值滤波是一种典型的非线性滤波技术,基本思想是用像素点邻域灰度值的中值来代替该像素点的灰度值。
中值滤波对椒盐噪声(salt-and-pepper noise)来说尤其有用,因为它不依赖于邻域内那些与典型值差别很大的值。
cv.medianBlur(src, ksize )
参数:
- src:输入图像
- ksize:卷积核的大小
示例:
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
# 1 图像读取
img = cv.imread('./image/dogsp.jpeg')
# 2 中值滤波
blur = cv.medianBlur(img,5)
# 3 图像展示
plt.figure(figsize=(10,8),dpi=100)
plt.subplot(121),plt.imshow(img[:,:,::-1]),plt.title('原图')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(blur[:,:,::-1]),plt.title('中值滤波后结果')
plt.xticks([]), plt.yticks([])
plt.show()
边缘检测
边缘检测是图像处理和计算机视觉中的基本问题,边缘检测的目的是标识数字图像中亮度变化明显的点。图像属性中的显著变化通常反映了属性的重要事件和变化。
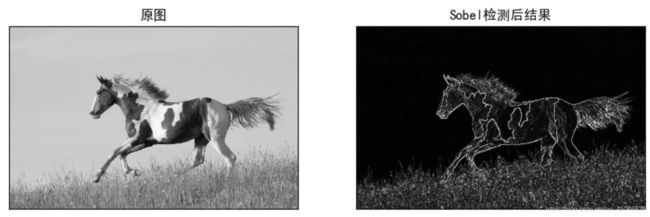
Sobel检测算子
Sobel边缘检测算法比较简单,实际应用中效率比canny边缘检测效率要高,但是边缘不如Canny检测的准确,但是很多实际应用的场合,sobel边缘却是首选,Sobel算子是高斯平滑与微分操作的结合体,所以其抗噪声能力很强,用途较多。尤其是效率要求较高,而对细纹理不太关心的时候。
利用OpenCV进行sobel边缘检测的API是:
Sobel_x_or_y = cv2.Sobel(src, ddepth, dx, dy, dst, ksize, scale, delta, borderType)
参数:
-
src:传入的图像
-
ddepth: 图像的深度
-
dx和dy: 指求导的阶数,0表示这个方向上没有求导,取值为0、1。
-
ksize: 是Sobel算子的大小,即卷积核的大小,必须为奇数1、3、5、7,默认为3。
注意:如果ksize=-1,就演变成为3x3的Scharr算子。
-
scale:缩放导数的比例常数,默认情况为没有伸缩系数。
-
borderType:图像边界的模式,默认值为cv2.BORDER_DEFAULT。
Sobel函数求完导数后会有负值,还有会大于255的值。而原图像是uint8,即8位无符号数,所以Sobel建立的图像位数不够,会有截断。因此要使用16位有符号的数据类型,即cv2.CV_16S。处理完图像后,再使用cv2.convertScaleAbs()函数将其转回原来的uint8格式,否则图像无法显示。
Sobel算子是在两个方向计算的,最后还需要用cv2.addWeighted( )函数将其组合起来
Scale_abs = cv2.convertScaleAbs(x) # 格式转换函数
result = cv2.addWeighted(src1, alpha, src2, beta) # 图像混合
示例:
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
# 1 读取图像
img = cv.imread('./image/horse.jpg',0)
# 2 计算Sobel卷积结果
x = cv.Sobel(img, cv.CV_16S, 1, 0)
y = cv.Sobel(img, cv.CV_16S, 0, 1)
# 3 将数据进行转换
Scale_absX = cv.convertScaleAbs(x) # convert 转换 scale 缩放
Scale_absY = cv.convertScaleAbs(y)
# 4 结果合成
result = cv.addWeighted(Scale_absX, 0.5, Scale_absY, 0.5, 0)
# 5 图像显示
plt.figure(figsize=(10,8),dpi=100)
plt.subplot(121),plt.imshow(img,cmap=plt.cm.gray),plt.title('原图')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(result,cmap = plt.cm.gray),plt.title('Sobel滤波后结果')
plt.xticks([]), plt.yticks([])
plt.show()
将上述代码中计算sobel算子的部分中将ksize设为-1,就是利用Scharr进行边缘检测。
x = cv.Sobel(img, cv.CV_16S, 1, 0, ksize = -1)
y = cv.Sobel(img, cv.CV_16S, 0, 1, ksize = -1)
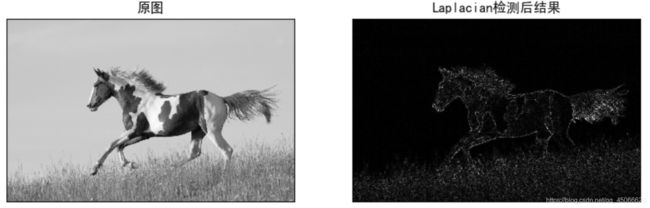
Laplacian算子
Laplacian是利用二阶导数来检测边缘 。
laplacian = cv2.Laplacian(src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]])
参数:
- Src: 需要处理的图像,
- Ddepth: 图像的深度,-1表示采用的是原图像相同的深度,目标图像的深度必须大于等于原图像的深度;
- ksize:算子的大小,即卷积核的大小,必须为1,3,5,7。
示例:
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
# 1 读取图像
img = cv.imread('./image/horse.jpg',0)
# 2 laplacian转换
result = cv.Laplacian(img,cv.CV_16S)
Scale_abs = cv.convertScaleAbs(result)
# 3 图像展示
plt.figure(figsize=(10,8),dpi=100)
plt.subplot(121),plt.imshow(img,cmap=plt.cm.gray),plt.title('原图')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(Scale_abs,cmap = plt.cm.gray),plt.title('Laplacian检测后结果')
plt.xticks([]), plt.yticks([])
plt.show()
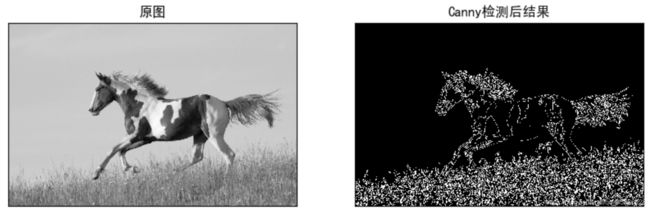
Canny边缘检测
Canny 边缘检测算法是一种非常流行的边缘检测算法,是 John F. Canny 于 1986年提出的,被认为是最优的边缘检测算法。
在OpenCV中要实现Canny检测使用的API:
canny = cv2.Canny(image, threshold1, threshold2)
参数:
- image:灰度图,
- threshold1: minval,较小的阈值将间断的边缘连接起来
- threshold2: maxval,较大的阈值检测图像中明显的边缘
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
# 1 图像读取
img = cv.imread('./image/horse.jpg',0)
# 2 Canny边缘检测
lowThreshold = 0
max_lowThreshold = 100
canny = cv.Canny(img, lowThreshold, max_lowThreshold)
# 3 图像展示
plt.figure(figsize=(10,8),dpi=100)
plt.subplot(121),plt.imshow(img,cmap=plt.cm.gray),plt.title('原图')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(canny,cmap = plt.cm.gray),plt.title('Canny检测后结果')
plt.xticks([]), plt.yticks([])
plt.show()