从零完成slam实战,以Vins-Fusion为例
写在前面
1.本文以vins-fusion为例,是因为其框架正统、简单清晰,易于调试和后续改进;camera-imu外参及同步时间td可实时估计;已有融合gps方案且较为容易可添加融合其它传感器。
2.本文致力于跑出稳定、较高精度的定位结果,故对imu、camera传感器的标定是必须的。为使文章流场、不至于过长,对于Realsense、Realsense-ros详细安装过程,imu、camera标定工具安装、标定,可参考文章Realsense d435i内参、外参标定和Realsense d435i驱动安装、配置及校准
一、方案
1.硬件方案
采用硬件为Intel NUC11TNKI7 + d435i。
前期准备
1.Realsense及Realsense-ros安装
安装后,运行 realsense-viewer ,添加摄像头和运动模块选项,可看到摄像头画面和imu 数据,证明安装成功。
2.slam方案
VINS Fusion是一种基于优化的多传感器状态估计器,可实现自主应用(无人机、汽车和AR/VR)的精确自我定位。VINS Fusion是VINS Mono的扩展,支持多种视觉惯性传感器类型(单摄像机+IMU、双目相机+IMU,或纯双目相机),且支持将VINS与GPS融合。主要特点如下:
(1)支持多传感器(双目相机/单目相机+IMU/双目相机+IMU)
(2)实时camera-imu外参校准(相机和IMU之间的转换)
(3)实时同步时间校准(相机和IMU之间的时间偏移)
(4)闭环可视化
二、传感器校准
可以说该步骤,是稳定运行,解决各种跑飞、结果不理想等问题的关键。
d435i传感器校准主要包括, imu六面校准、imu随机游走和噪声校准、camera内参和imu-camera外参校准,其中前三项在文章开头已说明,接下来详细阐述使用vins-fusion进行imu-camera外参校准。
三、运行前准备
1.配置文件设置
(1)双目相机参数配置(left.yaml、right.yaml)
将之前校准好的双目相机参数,以左目为例:
left.yaml
model_type: PINHOLE
camera_name: camera
image_width: 640
image_height: 480
distortion_parameters:
k1: 0.007532405272341989
k2: -0.03198723534231893
p1: -0.00015249992792258453
p2: 0.001638891018727039
projection_parameters:
fx: 391.57645976863694
fy: 392.2173924045597
cx: 326.83301528066227
cy: 235.30947818084246
(2)运行参数配置(realsense_stereo_imu_config.yaml)
#common parameters
#support: 1 imu 1 cam; 1 imu 2 cam: 2 cam;
imu: 1
num_of_cam: 2
imu_topic: "/camera/imu"
image0_topic: "/camera/infra1/image_rect_raw"
image1_topic: "/camera/infra2/image_rect_raw"
output_path: "/home/ocean/vins_fuison/vins_output"
cam0_calib: "left.yaml"
cam1_calib: "right.yaml"
image_width: 640
image_height: 480
# Extrinsic parameter between IMU and Camera.
estimate_extrinsic: 1 # 0 Have an accurate extrinsic parameters. We will trust the following imu^R_cam, imu^T_cam, don't change it.
# 1 Have an initial guess about extrinsic parameters. We will optimize around your initial guess.
body_T_cam0: !!opencv-matrix
rows: 4
cols: 4
dt: d
data: [ 9.9983415896161643e-01, -3.9428551504684375e-03,
1.7779439439409347e-02, -1.4253776535446258e-02,
4.3522937648056296e-03, 9.9972485834939917e-01,
-2.3049189514136877e-02, 2.2657863548970836e-01,
-1.7683667959505291e-02, 2.3122748356027831e-02,
9.9957622340467955e-01, -1.0893316869998337e+00, 0., 0., 0., 1. ]
body_T_cam1: !!opencv-matrix
rows: 4
cols: 4
dt: d
data: [ 9.9979604443066683e-01, -2.9603891467875603e-03,
1.9977628410091861e-02, 9.0127435964667407e-03,
3.4155776956196725e-03, 9.9973445341878342e-01,
-2.2789393946561421e-02, 2.2694441090281392e-01,
-1.9904857944665476e-02, 2.2852981064753180e-02,
9.9954066344829451e-01, -1.0861428664701842e+00, 0., 0., 0., 1. ]
#Multiple thread support
multiple_thread: 1
#feature traker paprameters
max_cnt: 150 # max feature number in feature tracking
min_dist: 30 # min distance between two features
freq: 10 # frequence (Hz) of publish tracking result. At least 10Hz for good estimation. If set 0, the frequence will be same as raw image
F_threshold: 1.0 # ransac threshold (pixel)
show_track: 1 # publish tracking image as topic
flow_back: 1 # perform forward and backward optical flow to improve feature tracking accuracy
#optimization parameters
max_solver_time: 0.04 # max solver itration time (ms), to guarantee real time
max_num_iterations: 8 # max solver itrations, to guarantee real time
keyframe_parallax: 10.0 # keyframe selection threshold (pixel)
#imu parameters The more accurate parameters you provide, the better performance
acc_n: 1.7512828345266122e-02 # accelerometer measurement noise standard deviation.
gyr_n: 3.3502044635737617e-03 # gyroscope measurement noise standard deviation.
acc_w: 4.2528647943077756e-04 # accelerometer bias random work noise standard deviation.
gyr_w: 4.8760608618583259e-05 # gyroscope bias random work noise standard deviation.
g_norm: 9.8046 # gravity magnitude
#unsynchronization parameters
estimate_td: 1 # online estimate time offset between camera and imu
td: 0.002004 # initial value of time offset. unit: s. readed image clock + td = real image clock (IMU clock)
#loop closure parameters
load_previous_pose_graph: 1 # load and reuse previous pose graph; load from 'pose_graph_save_path'
pose_graph_save_path: "/home/ocean/vins_fuison/vins_output/pose_graph/" # save and load path
save_image: 1 # save image in pose graph for visualization prupose; you can close this function by setting 0
2.外参校准
利用Vins-Fusion可实时优化camera-imu外参的功能,找一个相对封闭的场景,拿着设备绕着该场景缓慢走动一圈,同时将数据录好包,具体操作如下:
(1)运行d435i
- source devel/setup.bash
- roslaunch realsense2_camera rs_camera.launch
(2)录包
- source devel/setup.bash
- rosbag record -O IndoorScene /camera/imu /camera/infra1/image_rect_raw /camera/infra2/image_rect_raw
(3)运行
工作空间建立shfiles文件夹
- mkdir -p shfiles
编写脚本run.sh
- touch run.sh
roslaunch vins vins_rviz.launch & sleep 5;
rosbag play bag/IndoorScene.bag & sleep 5;
roslaunch vins vins_node src/VINS-Fusion/config/realsense_d435i/realsense_stere_imu_config.yaml & sleep 3;
roslaunch loop_fusion loop_fusion_node src/VINS-Fusion/config/realsense_d435i/realsense_stere_imu_config.yaml;
wait;
- cd vins_fusion
- source devel/setup.bash
- sh run.sh
在外参输出结果路径,将extrinsic_parameter.txt中数据替换掉realsense_stereo_imu_config.yaml中外参数据。每次替换完后再次运行,离线重复多次,直至外参收敛到一个比较满意的结果。
注:录包离线重复多次优化外参方法,省去不断重复走的过程。
三、结果
经过上一步,我们就得到imu、camera和imu-camera比较准确的数据了,可以开始正式测试了。
测试环境为800m2的办公区域,走动过程中经过多处门、过道和灯光。为了测试重复定位精度,走了两圈。从实际跑视频中可以看到,整体效果如下所示,图1实际走动轨迹,图2xyz里程计数据曲线,图3xyz闭环数据曲线。
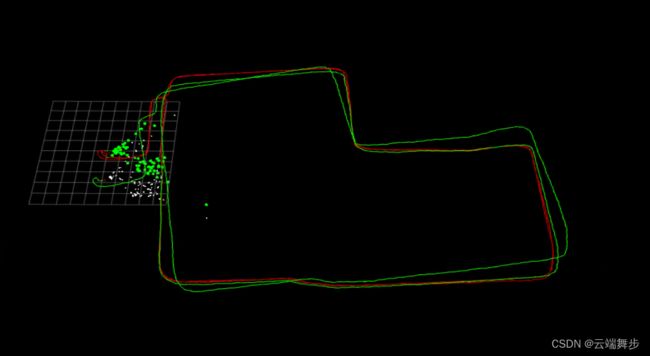
从实际轨迹看整体效果较好,里程计轨迹存在漂移,闭环轨迹几乎重合。

从里程计数据曲线可以看出,里程计轨迹存在漂移,z轴漂移最大,漂移1.5m左右。
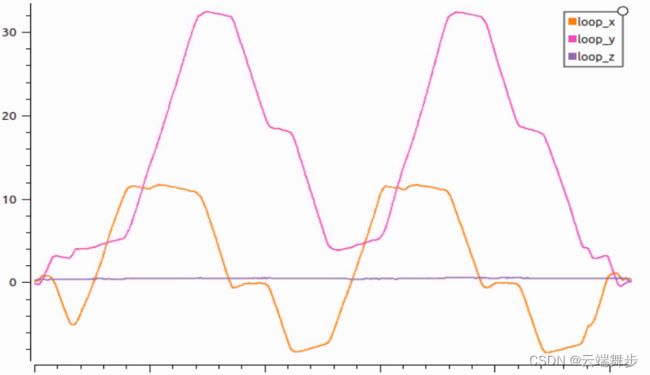
发生闭环后,从实际轨迹后,两圈基本重合,z轴最大漂移在30cm以内。
附视频
bilibili d435i + vins-fusion 室内测试
后续预告:
接下来将对vins_fusion重点部分进行详细拆解,大致包括:
1.Vins-Fusion主题框架,数据流分析;
2.前端:基于LK光流法跟踪特征法的原理、源码细节处理及对比特征点法的优劣;
3.后端:基于BA优化的位姿估计,主要包括:如何构建IMU残差、左右目残差、单目前后两帧残差,前帧左目当前帧右目残差;
4.回环检测:基于词袋模型DBoW回环检测分析;
5.其它:外参矩阵实时估计、3d-2d PNP求解、三角化、初始化如何实现位姿对齐等。
参考:
https://blog.csdn.net/u010196944/article/details/127239342
https://blog.csdn.net/u010196944/article/details/127238908
https://github.com/HKUST-Aerial-Robotics/VINS-Fusion