PyTorch-PyramidBoxDemo
PyTorch-PyramidBoxDemo
硬件:NVIDIA-GTX1080
软件:Windows10、python3.6.5、pytorch-gpu-0.4.1
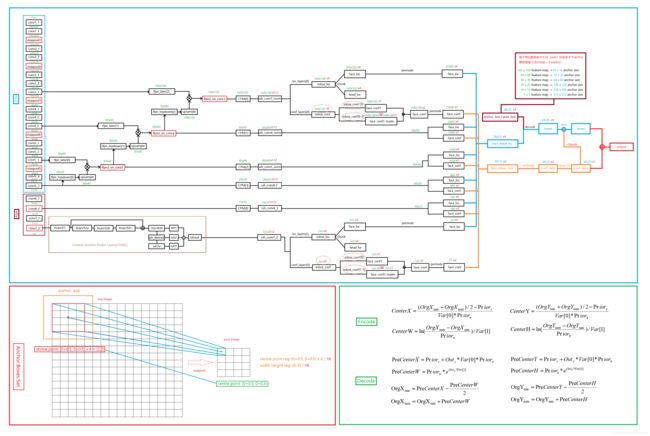
一、基础知识(一图看懂)
二、代码展示
1、demo.py
#-*- coding:utf-8 -*-
from __future__ import division
from __future__ import absolute_import
from __future__ import print_function
import torch
import torch.backends.cudnn as cudnn
from torch.autograd import Variable
import cv2
import time
import numpy as np
from PIL import Image
from config import cfg
from pyramidbox import build_net
use_cuda = torch.cuda.is_available()
if use_cuda:
torch.set_default_tensor_type('torch.cuda.FloatTensor')
else:
torch.set_default_tensor_type('torch.FloatTensor')
def to_chw_bgr(image):
"""
Transpose image from HWC to CHW and from RBG to BGR.
Args:
image (np.array): an image with HWC and RBG layout.
"""
# HWC to CHW
if len(image.shape) == 3:
image = np.swapaxes(image, 1, 2)
image = np.swapaxes(image, 1, 0)
# RBG to BGR
image = image[[2, 1, 0], :, :]
return image
def detect(net, img_path, thresh):
img = Image.open(img_path)
if img.mode == 'L':
img = img.convert('RGB')
img = np.array(img)
height, width, _ = img.shape
max_im_shrink = np.sqrt(
1200 * 1100 / (img.shape[0] * img.shape[1]))
image = cv2.resize(img, None, None, fx=max_im_shrink,
fy=max_im_shrink, interpolation=cv2.INTER_LINEAR)
x = to_chw_bgr(image)
x = x.astype('float32')
x -= cfg.img_mean
x = x[[2, 1, 0], :, :]
#x = x * cfg.scale
x = Variable(torch.from_numpy(x).unsqueeze(0))
if use_cuda:
x = x.cuda()
t1 = time.time()
y = net(x)
detections = y.data
scale = torch.Tensor([img.shape[1], img.shape[0],
img.shape[1], img.shape[0]])
for i in range(detections.size(1)):
j = 0
while detections[0, i, j, 0] >= thresh:
score = detections[0, i, j, 0]
pt = (detections[0, i, j, 1:] * scale).cpu().numpy().astype(int)
left_up, right_bottom = (pt[0], pt[1]), (pt[2], pt[3])
j += 1
cv2.rectangle(img, left_up, right_bottom, (0, 0, 255), 2)
conf = "{:.2f}".format(score)
text_size, baseline = cv2.getTextSize(
conf, cv2.FONT_HERSHEY_SIMPLEX, 0.3, 1)
p1 = (left_up[0], left_up[1] - text_size[1])
cv2.rectangle(img, (p1[0] - 2 // 2, p1[1] - 2 - baseline),
(p1[0] + text_size[0], p1[1] + text_size[1]), [255, 0, 0], -1)
cv2.putText(img, conf, (p1[0], p1[
1] + baseline), cv2.FONT_HERSHEY_SIMPLEX, 0.3, (255, 255, 255), 1, 8)
t2 = time.time()
print('detect:{} timer:{}'.format(img_path, t2 - t1))
cv2.imwrite("demo.jpg", img)
if __name__ == '__main__':
model='weights/pyramidbox_120000_99.02.pth'
net = build_net('test', cfg.NUM_CLASSES)
net.load_state_dict(torch.load(model))
net.eval()
if use_cuda:
net.cuda()
cudnn.benckmark = True
path = "test.jpg"
thresh=0.4
detect(net, path, thresh)
2、pyramidbox.py
#-*- coding:utf-8 -*-
from __future__ import absolute_import
from __future__ import division
from __future__ import print_function
import torch
import torch.nn as nn
import torch.nn.init as init
from torch.autograd import Function
import torch.nn.functional as F
from torch.autograd import Variable
import os
from config import cfg
from itertools import product as product
class PriorBox(object):
"""Compute priorbox coordinates in center-offset form for each source
feature map.
"""
def __init__(self, input_size, feature_maps,cfg):
super(PriorBox, self).__init__()
self.imh = input_size[0]
self.imw = input_size[1]
# number of priors for feature map location (either 4 or 6)
self.variance = cfg.VARIANCE or [0.1] #cfg.VARIANCE
#self.feature_maps = cfg.FEATURE_MAPS
self.min_sizes = cfg.ANCHOR_SIZES #[16, 32, 64, 128, 256, 512]
self.steps = cfg.STEPS #[4, 8, 16, 32, 64, 128]
self.clip = cfg.CLIP
for v in self.variance:
if v <= 0:
raise ValueError('Variances must be greater than 0')
self.feature_maps = feature_maps
def forward(self):
mean = []
for k in range(len(self.feature_maps)):
feath = self.feature_maps[k][0]
featw = self.feature_maps[k][1]
for i, j in product(range(feath), range(featw)):
f_kw = self.imw / self.steps[k]
f_kh = self.imh / self.steps[k]
cx = (j + 0.5) / f_kw # cx = (j + 0.5) * self.step / self.imw ; for org image, center
cy = (i + 0.5) / f_kh # cy = (i + 0.5) * self.step / self.imh ; for org image, center
s_kw = self.min_sizes[k] / self.imw # for org image, center
s_kh = self.min_sizes[k] / self.imh # for org image, center
mean += [cx, cy, s_kw, s_kh]
output = torch.Tensor(mean).view(-1, 4)
if self.clip:
output.clamp_(max=1, min=0)
return output
def decode(loc, priors, variances):
"""Decode locations from predictions using priors to undo
the encoding we did for offset regression at train time.
Args:
loc (tensor): location predictions for loc layers,
Shape: [num_priors,4]
priors (tensor): Prior boxes in center-offset form.
Shape: [num_priors,4].
variances: (list[float]) Variances of priorboxes
Return:
decoded bounding box predictions
"""
boxes = torch.cat((
priors[:, :2] + loc[:, :2] * variances[0] * priors[:, 2:],
priors[:, 2:] * torch.exp(loc[:, 2:] * variances[1])), 1)
boxes[:, :2] -= boxes[:, 2:] / 2
boxes[:, 2:] += boxes[:, :2]
return boxes
def nms(boxes, scores, overlap=0.5, top_k=200):
"""Apply non-maximum suppression at test time to avoid detecting too many
overlapping bounding boxes for a given object.
Args:
boxes: (tensor) The location preds for the img, Shape: [num_priors,4].
scores: (tensor) The class predscores for the img, Shape:[num_priors].
overlap: (float) The overlap thresh for suppressing unnecessary boxes.
top_k: (int) The Maximum number of box preds to consider.
Return:
The indices of the kept boxes with respect to num_priors.
"""
keep = scores.new(scores.size(0)).zero_().long()
if boxes.numel() == 0:
return keep
x1 = boxes[:, 0]
y1 = boxes[:, 1]
x2 = boxes[:, 2]
y2 = boxes[:, 3]
area = torch.mul(x2 - x1, y2 - y1)
v, idx = scores.sort(0) # sort in ascending order
# I = I[v >= 0.01]
idx = idx[-top_k:] # indices of the top-k largest vals
xx1 = boxes.new()
yy1 = boxes.new()
xx2 = boxes.new()
yy2 = boxes.new()
w = boxes.new()
h = boxes.new()
# keep = torch.Tensor()
count = 0
while idx.numel() > 0:
i = idx[-1] # index of current largest val
# keep.append(i)
keep[count] = i
count += 1
if idx.size(0) == 1:
break
idx = idx[:-1] # remove kept element from view
# load bboxes of next highest vals
torch.index_select(x1, 0, idx, out=xx1)
torch.index_select(y1, 0, idx, out=yy1)
torch.index_select(x2, 0, idx, out=xx2)
torch.index_select(y2, 0, idx, out=yy2)
# store element-wise max with next highest score
xx1 = torch.clamp(xx1, min=x1[i])
yy1 = torch.clamp(yy1, min=y1[i])
xx2 = torch.clamp(xx2, max=x2[i])
yy2 = torch.clamp(yy2, max=y2[i])
w.resize_as_(xx2)
h.resize_as_(yy2)
w = xx2 - xx1
h = yy2 - yy1
# check sizes of xx1 and xx2.. after each iteration
w = torch.clamp(w, min=0.0)
h = torch.clamp(h, min=0.0)
inter = w * h
# IoU = i / (area(a) + area(b) - i)
rem_areas = torch.index_select(area, 0, idx) # load remaining areas)
union = (rem_areas - inter) + area[i]
IoU = inter / union # store result in iou
# keep only elements with an IoU <= overlap
idx = idx[IoU.le(overlap)]
return keep, count
class Detect(Function):
"""At test time, Detect is the final layer of SSD. Decode location preds,
apply non-maximum suppression to location predictions based on conf
scores and threshold to a top_k number of output predictions for both
confidence score and locations.
"""
def __init__(self, cfg):
self.num_classes = cfg.NUM_CLASSES
self.top_k = cfg.TOP_K
self.nms_thresh = cfg.NMS_THRESH
self.conf_thresh = cfg.CONF_THRESH
self.variance = cfg.VARIANCE # [0.1, 0.2]
def forward(self, loc_data, conf_data, prior_data):
"""
Args:
loc_data: (tensor) Loc preds from loc layers
Shape: [batch,num_priors*4]
conf_data: (tensor) Shape: Conf preds from conf layers
Shape: [batch*num_priors,num_classes]
prior_data: (tensor) Prior boxes and variances from priorbox layers
Shape: [1,num_priors,4]
"""
num = loc_data.size(0)
num_priors = prior_data.size(0)
conf_preds = conf_data.view(
num, num_priors, self.num_classes).transpose(2, 1)
batch_priors = prior_data.view(-1, num_priors,
4).expand(num, num_priors, 4)
batch_priors = batch_priors.contiguous().view(-1, 4)
################decode box###################
decoded_boxes = decode(loc_data.view(-1, 4),
batch_priors, self.variance)
decoded_boxes = decoded_boxes.view(num, num_priors, 4)
output = torch.zeros(num, self.num_classes, self.top_k, 5)
###############nms box and take top5000###########
for i in range(num):
boxes = decoded_boxes[i].clone()
conf_scores = conf_preds[i].clone()
for cl in range(1, self.num_classes):
c_mask = conf_scores[cl].gt(self.conf_thresh) # 0.05
scores = conf_scores[cl][c_mask]
if scores.dim() == 0:
continue
l_mask = c_mask.unsqueeze(1).expand_as(boxes)
boxes_ = boxes[l_mask].view(-1, 4)
ids, count = nms(
boxes_, scores, self.nms_thresh, self.top_k)
output[i, cl, :count] = torch.cat((scores[ids[:count]].unsqueeze(1),
boxes_[ids[:count]]), 1)
return output
class L2Norm(nn.Module):
def __init__(self,n_channels, scale):
super(L2Norm,self).__init__()
self.n_channels = n_channels
self.gamma = scale or None
self.eps = 1e-10
self.weight = nn.Parameter(torch.Tensor(self.n_channels))
self.reset_parameters()
def reset_parameters(self):
init.constant(self.weight,self.gamma)
def forward(self, x):
norm = x.pow(2).sum(dim=1, keepdim=True).sqrt()+self.eps
#x /= norm
x = torch.div(x,norm)
out = self.weight.unsqueeze(0).unsqueeze(2).unsqueeze(3).expand_as(x) * x
return out
class conv_bn(nn.Module):
"""docstring for conv"""
def __init__(self,
in_plane,
out_plane,
kernel_size,
stride,
padding):
super(conv_bn, self).__init__()
self.conv1 = nn.Conv2d(in_plane, out_plane,
kernel_size=kernel_size, stride=stride, padding=padding)
self.bn1 = nn.BatchNorm2d(out_plane)
def forward(self, x):
x = self.conv1(x)
return self.bn1(x)
class CPM(nn.Module):
"""docstring for CPM"""
def __init__(self, in_plane):
super(CPM, self).__init__()
self.branch1 = conv_bn(in_plane, 1024, 1, 1, 0)
self.branch2a = conv_bn(in_plane, 256, 1, 1, 0)
self.branch2b = conv_bn(256, 256, 3, 1, 1)
self.branch2c = conv_bn(256, 1024, 1, 1, 0)
self.ssh_1 = nn.Conv2d(1024, 256, kernel_size=3, stride=1, padding=1)
self.ssh_dimred = nn.Conv2d(
1024, 128, kernel_size=3, stride=1, padding=1)
self.ssh_2 = nn.Conv2d(128, 128, kernel_size=3, stride=1, padding=1)
self.ssh_3a = nn.Conv2d(128, 128, kernel_size=3, stride=1, padding=1)
self.ssh_3b = nn.Conv2d(128, 128, kernel_size=3, stride=1, padding=1)
def forward(self, x):
out_residual = self.branch1(x)
x = F.relu(self.branch2a(x), inplace=True)
x = F.relu(self.branch2b(x), inplace=True)
x = self.branch2c(x)
rescomb = F.relu(x + out_residual, inplace=True)
ssh1 = self.ssh_1(rescomb)
ssh_dimred = F.relu(self.ssh_dimred(rescomb), inplace=True)
ssh_2 = self.ssh_2(ssh_dimred)
ssh_3a = F.relu(self.ssh_3a(ssh_dimred), inplace=True)
ssh_3b = self.ssh_3b(ssh_3a)
ssh_out = torch.cat([ssh1, ssh_2, ssh_3b], dim=1)
ssh_out = F.relu(ssh_out, inplace=True)
return ssh_out
class PyramidBox(nn.Module):
"""docstring for PyramidBox"""
def __init__(self,
phase,
base,
extras,
lfpn_cpm,
head,
num_classes):
super(PyramidBox, self).__init__()
#self.use_transposed_conv2d = use_transposed_conv2d
self.vgg = nn.ModuleList(base)
self.extras = nn.ModuleList(extras)
self.L2Norm3_3 = L2Norm(256, 10)
self.L2Norm4_3 = L2Norm(512, 8)
self.L2Norm5_3 = L2Norm(512, 5)
self.lfpn_topdown = nn.ModuleList(lfpn_cpm[0])
self.lfpn_later = nn.ModuleList(lfpn_cpm[1])
self.cpm = nn.ModuleList(lfpn_cpm[2])
self.loc_layers = nn.ModuleList(head[0])
self.conf_layers = nn.ModuleList(head[1])
self.is_infer = False
if phase == 'test':
self.softmax = nn.Softmax(dim=-1)
self.detect = Detect(cfg)
self.is_infer = True
def _upsample_prod(self, x, y):
_, _, H, W = y.size()
return F.upsample(x, size=(H, W), mode='bilinear') * y
def forward(self, x):
size = x.size()[2:]
#################################base_vgg#############################
# apply vgg up to conv3_3 relu
for k in range(16):
x = self.vgg[k](x)
conv3_3 = x
# apply vgg up to conv4_3
for k in range(16, 23):
x = self.vgg[k](x)
conv4_3 = x
for k in range(23, 30):
x = self.vgg[k](x)
conv5_3 = x
for k in range(30, len(self.vgg)):
x = self.vgg[k](x)
convfc_7 = x
# apply extra layers and cache source layer outputs
for k in range(2):
x = F.relu(self.extras[k](x), inplace=True)
conv6_2 = x
for k in range(2, 4):
x = F.relu(self.extras[k](x), inplace=True)
conv7_2 = x
####################################lfpn##############################
x = F.relu(self.lfpn_topdown[0](convfc_7), inplace=True)
lfpn2_on_conv5 = F.relu(self._upsample_prod(
x, self.lfpn_later[0](conv5_3)), inplace=True)
x = F.relu(self.lfpn_topdown[1](lfpn2_on_conv5), inplace=True)
lfpn1_on_conv4 = F.relu(self._upsample_prod(
x, self.lfpn_later[1](conv4_3)), inplace=True)
x = F.relu(self.lfpn_topdown[2](lfpn1_on_conv4), inplace=True)
lfpn0_on_conv3 = F.relu(self._upsample_prod(
x, self.lfpn_later[2](conv3_3)), inplace=True)
####################################cpm##############################
ssh_conv3_norm = self.cpm[0](self.L2Norm3_3(lfpn0_on_conv3))
ssh_conv4_norm = self.cpm[1](self.L2Norm4_3(lfpn1_on_conv4))
ssh_conv5_norm = self.cpm[2](self.L2Norm5_3(lfpn2_on_conv5))
ssh_convfc7 = self.cpm[3](convfc_7)
ssh_conv6 = self.cpm[4](conv6_2)
ssh_conv7 = self.cpm[5](conv7_2)
########################loc_layers[0] conf_layers[0]#################
face_locs, face_confs = [], []
head_locs, head_confs = [], []
N = ssh_conv3_norm.size(0)
mbox_loc = self.loc_layers[0](ssh_conv3_norm)
face_loc, head_loc = torch.chunk(mbox_loc, 2, dim=1)
face_loc = face_loc.permute(
0, 2, 3, 1).contiguous().view(N, -1, 4)
if not self.is_infer:
head_loc = head_loc.permute(
0, 2, 3, 1).contiguous().view(N, -1, 4)
mbox_conf = self.conf_layers[0](ssh_conv3_norm)
face_conf1 = mbox_conf[:, 3:4, :, :]
face_conf3_maxin, _ = torch.max(
mbox_conf[:, 0:3, :, :], dim=1, keepdim=True)
face_conf = torch.cat((face_conf3_maxin, face_conf1), dim=1)
face_conf = face_conf.permute(
0, 2, 3, 1).contiguous().view(N, -1, 2)
if not self.is_infer:
head_conf3_maxin, _ = torch.max(
mbox_conf[:, 4:7, :, :], dim=1, keepdim=True)
head_conf1 = mbox_conf[:, 7:, :, :]
head_conf = torch.cat((head_conf3_maxin, head_conf1), dim=1)
head_conf = head_conf.permute(
0, 2, 3, 1).contiguous().view(N, -1, 2)
###############loc_layers[1-5] conf_layers[1-5]#################
face_locs.append(face_loc)
face_confs.append(face_conf)
if not self.is_infer:
head_locs.append(head_loc)
head_confs.append(head_conf)
inputs = [ssh_conv4_norm, ssh_conv5_norm,
ssh_convfc7, ssh_conv6, ssh_conv7]
feature_maps = []
feat_size = ssh_conv3_norm.size()[2:]
feature_maps.append([feat_size[0], feat_size[1]])
for i, feat in enumerate(inputs):
feat_size = feat.size()[2:]
feature_maps.append([feat_size[0], feat_size[1]])
mbox_loc = self.loc_layers[i + 1](feat)
face_loc, head_loc = torch.chunk(mbox_loc, 2, dim=1)
face_loc = face_loc.permute(
0, 2, 3, 1).contiguous().view(N, -1, 4)
if not self.is_infer:
head_loc = head_loc.permute(
0, 2, 3, 1).contiguous().view(N, -1, 4)
mbox_conf = self.conf_layers[i + 1](feat)
face_conf1 = mbox_conf[:, 0:1, :, :]
face_conf3_maxin, _ = torch.max(
mbox_conf[:, 1:4, :, :], dim=1, keepdim=True)
face_conf = torch.cat((face_conf1, face_conf3_maxin), dim=1)
face_conf = face_conf.permute(
0, 2, 3, 1).contiguous().view(N, -1, 2)
if not self.is_infer:
head_conf = mbox_conf[:, 4:, :, :].permute(
0, 2, 3, 1).contiguous().view(N, -1, 2)
face_locs.append(face_loc)
face_confs.append(face_conf)
if not self.is_infer:
head_locs.append(head_loc)
head_confs.append(head_conf)
###########################PriorBox Set###############################
face_mbox_loc = torch.cat(face_locs, dim=1)
face_mbox_conf = torch.cat(face_confs, dim=1)
if not self.is_infer:
head_mbox_loc = torch.cat(head_locs, dim=1)
head_mbox_conf = torch.cat(head_confs, dim=1)
priors_boxes = PriorBox(size, feature_maps, cfg)
priors = Variable(priors_boxes.forward(), volatile=True) #priors_boxes [34125, 4]
#################face_mbox_loc face_mbox_conf########################
if not self.is_infer:
output = (face_mbox_loc, face_mbox_conf,
head_mbox_loc, head_mbox_conf, priors)
else:
output = self.detect(face_mbox_loc,
self.softmax(face_mbox_conf),
priors)
return output
def load_weights(self, base_file):
other, ext = os.path.splitext(base_file)
if ext == '.pkl' or '.pth':
print('Loading weights into state dict...')
mdata = torch.load(base_file,
map_location=lambda storage, loc: storage)
weights = mdata['weight']
epoch = mdata['epoch']
self.load_state_dict(weights)
print('Finished!')
else:
print('Sorry only .pth and .pkl files supported.')
return epoch
def xavier(self, param):
init.xavier_uniform(param)
def weights_init(self, m):
if isinstance(m, nn.Conv2d):
self.xavier(m.weight.data)
if 'bias' in m.state_dict().keys():
m.bias.data.zero_()
if isinstance(m, nn.ConvTranspose2d):
self.xavier(m.weight.data)
if 'bias' in m.state_dict().keys():
m.bias.data.zero_()
if isinstance(m, nn.BatchNorm2d):
m.weight.data[...] = 1
m.bias.data.zero_()
vgg_cfg = [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 'M', 512, 512, 512, 'M',
512, 512, 512, 'M']
def vgg(cfg, i, batch_norm=False):
layers = []
in_channels = i
for v in cfg:
if v == 'M':
layers += [nn.MaxPool2d(kernel_size=2, stride=2)]
elif v == 'C':
layers += [nn.MaxPool2d(kernel_size=2, stride=2, ceil_mode=True)]
else:
conv2d = nn.Conv2d(in_channels, v, kernel_size=3, padding=1)
if batch_norm:
layers += [conv2d, nn.BatchNorm2d(v), nn.ReLU(inplace=True)]
else:
layers += [conv2d, nn.ReLU(inplace=True)]
in_channels = v
conv6 = nn.Conv2d(512, 1024, kernel_size=3, padding=6, dilation=6)
conv7 = nn.Conv2d(1024, 1024, kernel_size=1)
layers += [conv6,
nn.ReLU(inplace=True), conv7, nn.ReLU(inplace=True)]
return layers
extras_cfg = [256, 'S', 512, 128, 'S', 256] # [2][5] not use
def add_extras(cfg, i, batch_norm=False):
# Extra layers added to VGG for feature scaling
layers = []
in_channels = i
flag = False
for k, v in enumerate(cfg):
if in_channels != 'S':
if v == 'S':
layers += [nn.Conv2d(in_channels, cfg[k + 1],
kernel_size=(1, 3)[flag], stride=2, padding=1)] #(1,3)[False] == 1 -> (1,3)[0] == 1
else:
layers += [nn.Conv2d(in_channels, v, kernel_size=(1, 3)[flag])]
flag = not flag
in_channels = v
return layers
lfpn_cpm_cfg = [256, 512, 512, 1024, 512, 256]
def add_lfpn_cpm(cfg):
lfpn_topdown_layers = []
lfpn_latlayer = []
cpm_layers = []
for k, v in enumerate(cfg):
cpm_layers.append(CPM(v))
fpn_list = cfg[::-1][2:]
for k, v in enumerate(fpn_list[:-1]):
lfpn_latlayer.append(nn.Conv2d(
fpn_list[k + 1], fpn_list[k + 1], kernel_size=1, stride=1, padding=0))
lfpn_topdown_layers.append(nn.Conv2d(
v, fpn_list[k + 1], kernel_size=1, stride=1, padding=0))
return (lfpn_topdown_layers, lfpn_latlayer, cpm_layers)
multibox_cfg = [512, 512, 512, 512, 512, 512]
def multibox(vgg, extra_layers):
loc_layers = []
conf_layers = []
vgg_source = [21, 28, -2]
i = 0
loc_layers += [nn.Conv2d(multibox_cfg[i],
8, kernel_size=3, padding=1)]
conf_layers += [nn.Conv2d(multibox_cfg[i],
8, kernel_size=3, padding=1)]
i += 1
for k, v in enumerate(vgg_source):
loc_layers += [nn.Conv2d(multibox_cfg[i],
8, kernel_size=3, padding=1)]
conf_layers += [nn.Conv2d(multibox_cfg[i],
6, kernel_size=3, padding=1)]
i += 1
for k, v in enumerate(extra_layers[1::2], 2):
loc_layers += [nn.Conv2d(multibox_cfg[i],
8, kernel_size=3, padding=1)]
conf_layers += [nn.Conv2d(multibox_cfg[i],
6, kernel_size=3, padding=1)]
i += 1
return vgg, extra_layers, (loc_layers, conf_layers)
def build_net(phase, num_classes=2):
base_, extras_, head_ = multibox(
vgg(vgg_cfg, 3), add_extras((extras_cfg), 1024))
lfpn_cpm = add_lfpn_cpm(lfpn_cpm_cfg)
return PyramidBox(phase, base_, extras_, lfpn_cpm, head_, num_classes)3、config.py
#-*- coding:utf-8 -*-
from __future__ import division
from __future__ import absolute_import
from __future__ import print_function
from easydict import EasyDict
import numpy as np
_C = EasyDict()
cfg = _C
# data augument config
_C.img_mean = np.array([104., 117., 123.])[:, np.newaxis, np.newaxis].astype(
'float32')
# anchor config
_C.FEATURE_MAPS = [160, 80, 40, 20, 10, 5]
_C.INPUT_SIZE = 640
_C.STEPS = [4, 8, 16, 32, 64, 128]
_C.ANCHOR_SIZES = [16, 32, 64, 128, 256, 512]
_C.CLIP = False
_C.VARIANCE = [0.1, 0.2] #方差
# loss config
_C.NUM_CLASSES = 2
_C.OVERLAP_THRESH = 0.35
_C.NEG_POS_RATIOS = 3
# detection config
_C.NMS_THRESH = 0.3
_C.TOP_K = 5000
_C.KEEP_TOP_K = 750
_C.CONF_THRESH = 0.05三、结果展示


四、参考:
https://github.com/yxlijun/Pyramidbox.pytorch
任何问题请加唯一QQ2258205918(名称samylee)!
或唯一VX:samylee_csdn