机器学习-22:MachineLN之RL
你要的答案或许都在这里:小鹏的博客目录
我想说:
其实很多事情找对方法很重要,可以事半功倍,就好比学习;
原本打算将机器学习基础写完以后再写深度学习、强化学习、迁移学习的内容,但是现在看还是中间穿插一点比较好。
看一下强化学习入门的一点东西,从概念说起吧:下面基本是在挖坑,后面会慢慢填起来。
其实机器学习可以大致分为三类:监督学习、非监督学习、强化学习;
强化学习是一个很重要的分支,目前来说比较火;
1. 什么是强化学习:
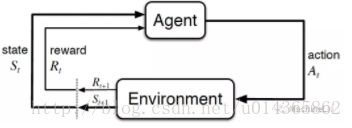
强化学习:它关注的是智能如何在环境中采取一系列行为,从而获得最大的累计回报,通过比较来更深刻的理解一下:
增强学习和监督学习的主要区别:
-
增强学习是试错学习,由于没有直接的指导信息,智能体要以不断与环境进行交互,通过试错的方式来获得最佳的策略;
-
延迟回报, 增强学习的指导信息很多, 而且往往是在事后(最后一个状态)才给出的,这就导致了一个问题,就是获得正报或者负报以后,如何将回报分配给前面的状态。
不明白不要紧,慢慢来,看个例子:
假设我们要构建一个下国际象棋的机器,这种情况不能使用监督学习,首先,我们本身不是优秀的棋手,而请象棋老师来遍历每个状态下的最佳棋步则代价过于昂贵。其次,每个棋步好坏判断不是孤立的,要依赖于对手的选择和局势的变化。是一系列的棋步组成的策略决定了是否能赢得比赛。下棋过程的唯一的反馈(在强化学习中这个反馈就是得到的奖励或者惩罚,也就是说延迟回报,并不是实时的,也可以理解为不以一时成败论英雄,只看最后,当然高手们对决几步就可能看出最终的胜负,你这么想问题又来了,你的AI思维哪去了?并不要想当然)是在最后赢得或是输掉棋局时才产生的。这种情况我们可以采用增强学习算法,通过不断的探索和试错学习,增强学习可以获得某种下棋的策略,并在每个状态下都选择最有可能获胜的棋步。目前这种算法已经在棋类游戏中得到了广泛应用。
2. 马尔可夫决策过程(MDP)
学习强化学习不得不知的马尔科夫决策过程:
一个马尔可夫决策过程由一个四元组构成M = (S, A, Psa, ?)
-
S: 表示状态集(states),有s∈S,si表示第i步的状态。
-
A:表示一组动作(actions),有a∈A,ai表示第i步的动作。
-
?sa: 表示状态转移概率。?s? 表示的是在当前s ∈ S状态下,经过a动作 ∈ A作用后,会转移到的其他状态的概率分布情况。比如,在状态s下执行动作a,转移到s'的概率可以表示为p(s'|s,a)。
-
R: S×A⟼ℝ ,R是回报函数(reward function)。有些回报函数状态S的函数,可以简化为R: S⟼ℝ。如果一组(s,a)转移到了下个状态s',那么回报函数可记为r(s'|s, a)。如果(s,a)对应的下个状态s'是唯一的,那么回报函数也可以记为r(s,a)。
上面的组成有了,那么我们让这些组合在一起想去做一件什么事情呢?其实最终的目的就是,知道现在的位置如何最快的到达目的地(达到目标),这个最快我们在这里使用回报来衡量的,也可以描述为获得的回报最大。这个是我们最终想要学习的东西,中间的过程是怎么做的? 了解过强化学习的应该知道算法:Sarsa和Q-learning:(跳跃有点快?有坑不要紧:学习就是挖坑和填坑的过程,这和强化学习的思想差不多,我也没必要万事俱备了再去做一些事情,可以不断的探索和试错学习,已经挖了很多坑,后面慢慢填起来)
再看一下图,可以得到大致流程:开始agent(Q表)随机一个state和action,给env,env给予反馈,得到下一个状态和奖励,更新agent,之后agent在根据这个状态和奖励作出下一步行动,再给env,一次迭代进化。
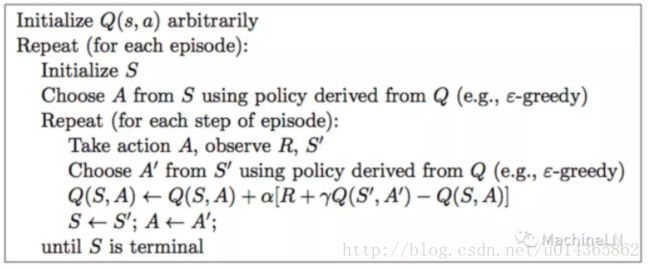
Sarsa:
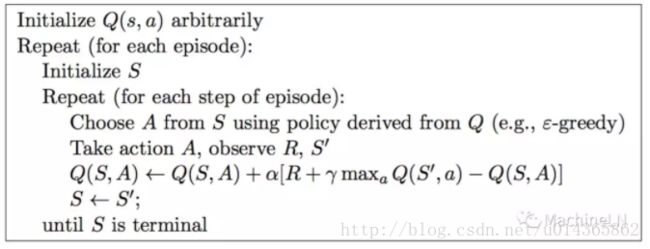
Q-learning:
上代码:先带带感觉:
Sarsa:
import numpy as np
import pandas as pd
import time
np.random.seed(2) # reproducible
# 定义6种状态
N_STATES = 6
# 在线性状态下只能采取往左或者往右
ACTIONS = ['left', 'right']
EPSILON = 0.9 # greedy police
# 学习率
ALPHA = 0.1
# 随机因素, 我们有10%的可能随便选取行动
GAMMA = 0.9
# 我们的智能体, 进化次数
MAX_EPISODES = 13
# 为了防止太快,方便观看,sleep一下
FRESH_TIME = 0.3
# Q表用来记录每种状态采取的行动回报值。
# 下面是进行初始化;
def build_q_table(n_states, actions):
table = pd.DataFrame(
np.zeros((n_states, len(actions))), # 初始化奖励值
columns=actions, # 采取的行动
)
# print(table)
return table
# 根据Q表,获取目前状态下采取的行动, 注意有10%的随机性
def choose_action(state, q_table):
# 获得在某状态下的奖励, 但是如何行动的话,怎么选择?
# 两种方式:(1)10%的随机;(2)选取回报最大的作为下一步的行动;
state_actions = q_table.iloc[state, :]
if (np.random.uniform() > EPSILON) or ((state_actions == 0).all()):
action_name = np.random.choice(ACTIONS)
else: # act greedy
action_name = state_actions.idxmax()
return action_name
# 根据行动后,所在的状态给予奖励;
def get_env_feedback(S, A):
# 这里智能体就会得到反馈;
# 往右移动
if A == 'right':
# 这就是延时回报的原因,开始进化时只有到了最后我们才知道是否应该给予奖励
if S == N_STATES - 2:
S_ = 'terminal'
R = 1
# 下面虽然没有给予奖励,但是状态加一,也就是说目的地更近了一步,也算是一种奖励
else:
S_ = S + 1
R = 0
# 那么如果你往左,下面都是惩罚
else:
R = 0
if S == 0:
S_ = S
else:
S_ = S - 1
return S_, R
# 用来更新目前的结果 和 现实
def update_env(S, episode, step_counter):
env_list = ['>>>']*(N_STATES-1) + ['OK']
if S == 'terminal':
interaction = 'Episode %s: total_steps = %s' % (episode+1, step_counter)
print('\r{}'.format(interaction), end='')
time.sleep(2)
print('\r ', end='')
else:
env_list[S] = 'ooo'
interaction = ''.join(env_list)
print('\r{}'.format(interaction), end='')
time.sleep(FRESH_TIME)
# 下面就是智能体核心进化流程, 也就是一个算法的优化流程;
def rl():
# 初始化Q表
q_table = build_q_table(N_STATES, ACTIONS)
# 智能体进化次数
for episode in range(MAX_EPISODES):
step_counter = 0
# 状态从0开始;
S = 0
# 行动往左开始;
A = 'left'
# 一个标示, 表示是否到达终点。
is_terminated = False
# 更新显示
update_env(S, episode, step_counter)
# 如果智能体没有到达目的地, 不停的迭代
while not is_terminated:
# 根据此时状态和采取的行动, 得到下一个所在的状态和应得奖励
S_, R = get_env_feedback(S, A)
# 判断上面采取行动A后是否到达目的地; 如果没有,此时再此状态从Q表获得下一步的行动;
if S_ != 'terminal':
A_ = choose_action(S_, q_table)
# 获得S状态A行动下的回报值,这里是后面此时Q表的更新;
q_predict = q_table.loc[S, A]
# Sarsa算法的精髓
if S_ != 'terminal':
q_target = R + GAMMA * q_table.loc[S_, A_] #.max() # next state is not terminal
# 达到目的地获得奖励, 回报给上一个状态动作哦, 就是这样回传的。
else:
q_target = R
is_terminated = True
# 更新
q_table.loc[S, A] += ALPHA * (q_target - q_predict)
S = S_
A = A_
print (S, A)
update_env(S, episode, step_counter+1)
step_counter += 1
print (q_table)
return q_table
if __name__ == "__main__":
q_table = rl()
print('\r\nQ-table:\n')
print(q_table)Q-learning:
将rl()换成这个:
def rl():
# main part of RL loop
q_table = build_q_table(N_STATES, ACTIONS)
for episode in range(MAX_EPISODES):
step_counter = 0
S = 0
is_terminated = False
update_env(S, episode, step_counter)
while not is_terminated:
A = choose_action(S, q_table)
S_, R = get_env_feedback(S, A) # take action & get next state and reward
q_predict = q_table.loc[S, A]
if S_ != 'terminal':
q_target = R + GAMMA * q_table.iloc[S_, :].max() # next state is not terminal
else:
q_target = R # next state is terminal
is_terminated = True # terminate this episode
q_table.loc[S, A] += ALPHA * (q_target - q_predict) # update
S = S_ # move to next state
update_env(S, episode, step_counter+1)
step_counter += 1
return q_table推荐阅读:
1. 机器学习-1:MachineLN之三要素
2. 机器学习-2:MachineLN之模型评估
3. 机器学习-3:MachineLN之dl
4. 机器学习-4:DeepLN之CNN解析
5. 机器学习-5:DeepLN之CNN权重更新(笔记)
6. 机器学习-6:DeepLN之CNN源码
7. 机器学习-7:MachineLN之激活函数
8. 机器学习-8:DeepLN之BN
9. 机器学习-9:MachineLN之数据归一化
10. 机器学习-10:MachineLN之样本不均衡
11. 机器学习-11:MachineLN之过拟合
12. 机器学习-12:MachineLN之优化算法
13. 机器学习-13:MachineLN之kNN
14. 机器学习-14:MachineLN之kNN源码
15. 机器学习-15:MachineLN之感知机
16. 机器学习-16:MachineLN之感知机源码
17. 机器学习-17:MachineLN之逻辑回归
18. 机器学习-18:MachineLN之逻辑回归源码
19. 机器学习-19:MachineLN之SVM(1)
20. 机器学习-20:MachineLN之SVM(2)
21. 机器学习-21:MachineLN之SVM源码
